上一节完成了autoware.ai的安装和编译跑通了demo数据集,本将自己录制的数据包用于测试
1.修改点云地图
将加载点云地图的my_map.launch文件复制并命名为my_map_test.launch,
(1)point cloud处替代原来的点云地图为自己的,vector map是高精地图,后续使用直接注释
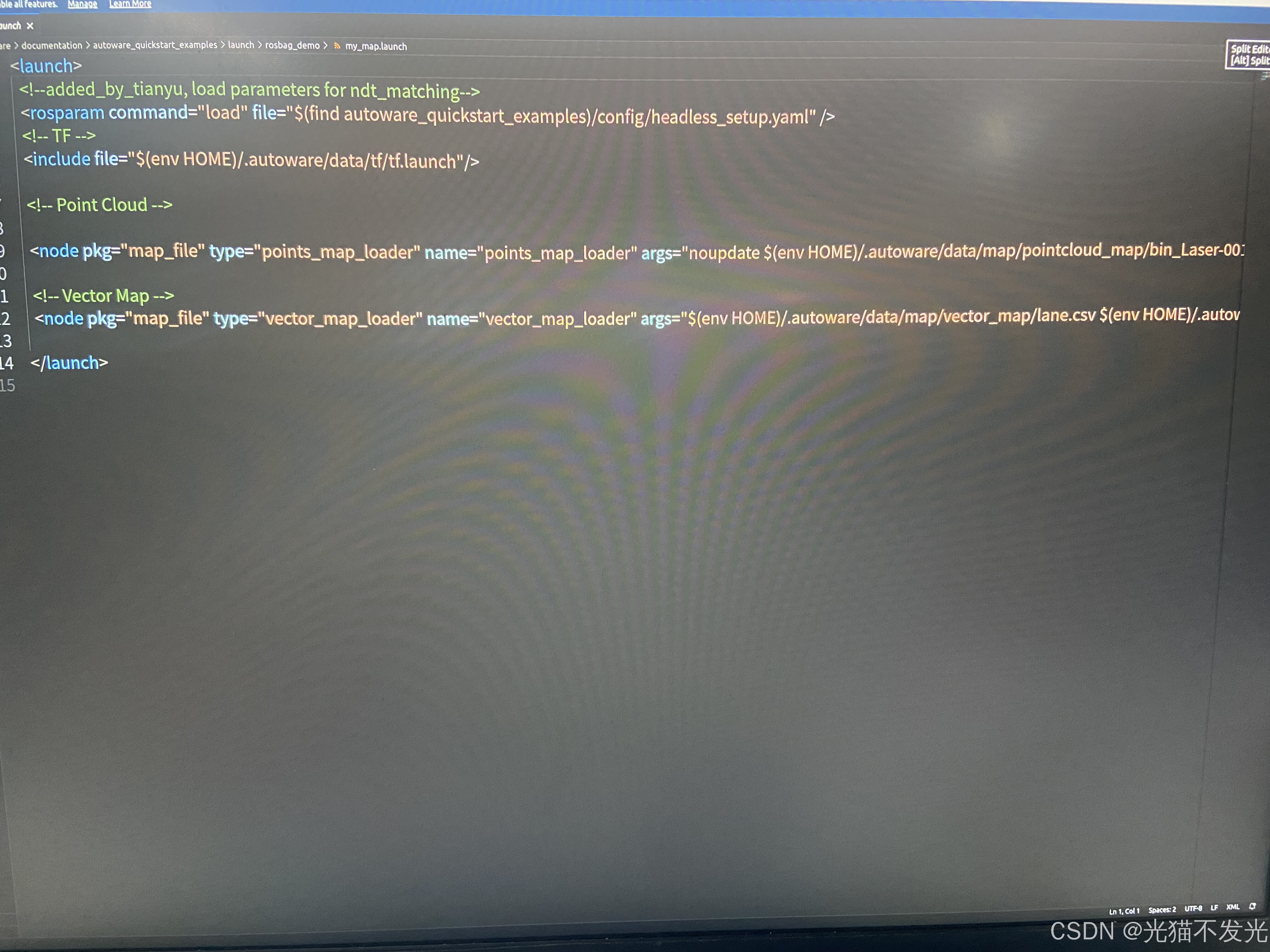
(如果没有可用pcd地图,用该launch文件播放bag建立)
保存地图(可以有更好的)我这里方法
保存地图保存为bag(bag快要结束的时候运行)
rosbag record -O map.bag /ndt_map
将上述bag中的地图保存pcd地图(会创建pcd文件夹并bag中会播放很多pcd地图,会自动覆盖并只保留最新那个)
rosrun pcl_ros bag_to_pcd map.bag /ndt_map pcd
cd autoware.ai/
source install/setup.bash
roslaunch autoware_quickstart_examples my_map_test.launch
##新终端
roslaunch autoware_quickstart_examples my_localization.launch
##新终端
rviz
播放自己数据集之前确保和官方一样
##新终端(播放自己的数据集)
rosbag play xxxx.bag
官方bag中的蓝色是GNSS定位可不用,红色为点云数据

数据类型为PointCloud2(注意不是scan)

话题/point_raw对应的frame_id为“velodyne”注意没有(“/”)

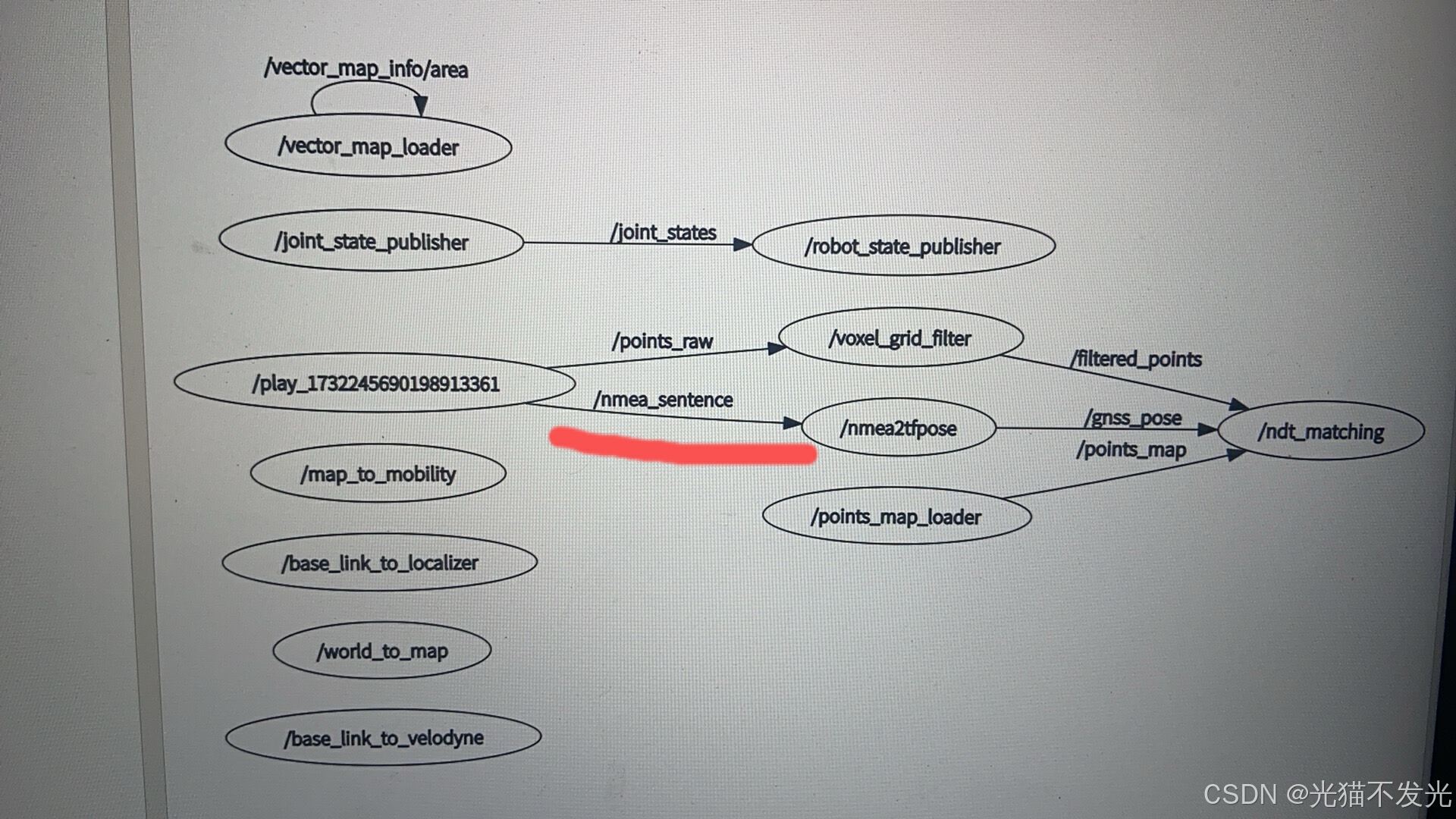
rqt如下:红色为GNSS的定位可以没有
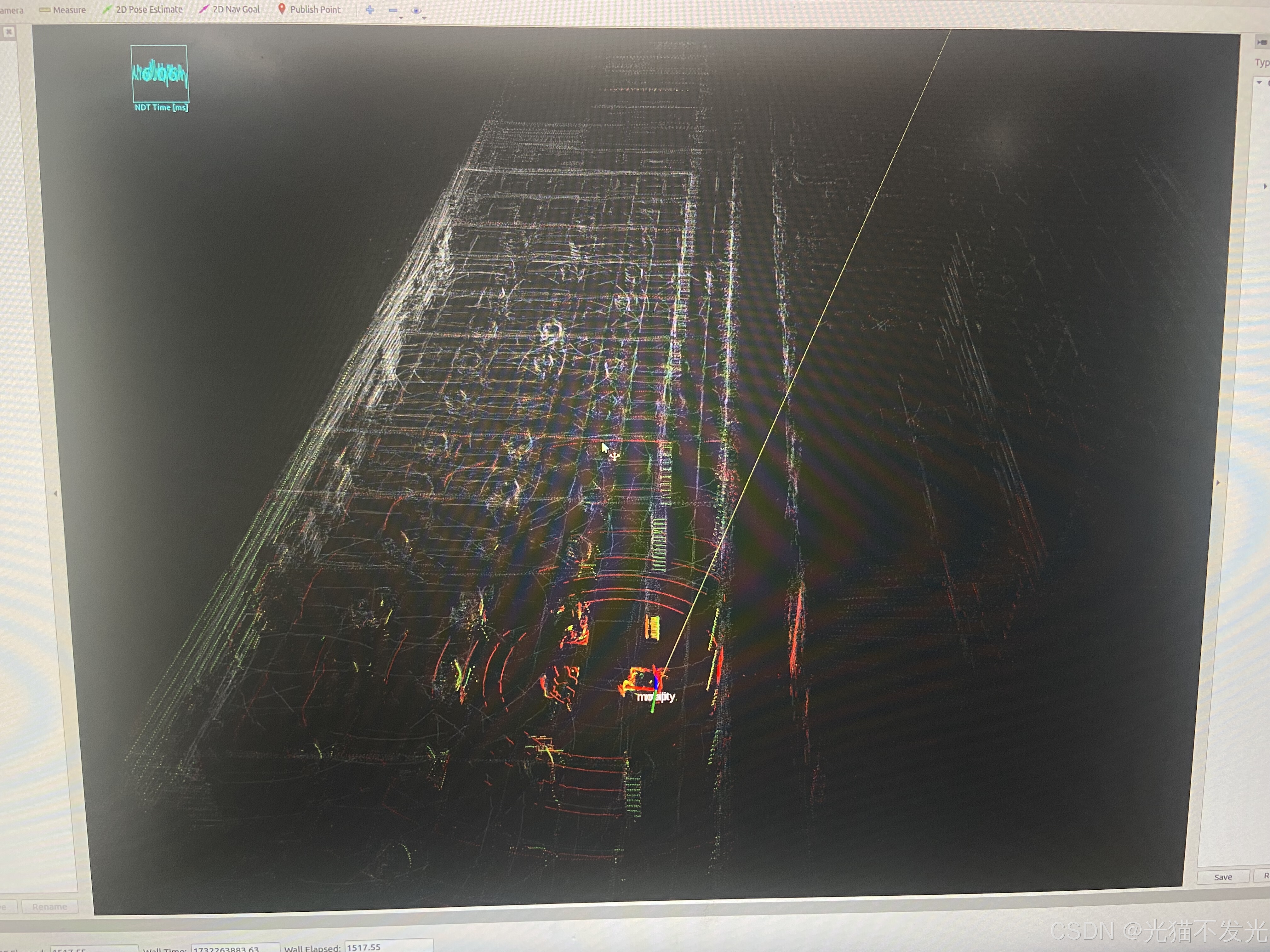
我的数据集结果如下:
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » autoware(2)运行自己的数据集

发表评论 取消回复