足旋转点(Foot Rotation Indicator, FRI)
足旋转点是人形机器人步态规划中的一个关键概念,用于描述步态过程中机器人脚部的旋转和稳定性。FRI 可以帮助确定机器人在行走时是否稳定,以及如何调整步态以保持稳定。下面详细介绍FRI的原理,并举例说明其应用。
足旋转点(FRI)原理
- FRI 是机器人行走过程中支撑脚的一个特定点,当机器人脚部在该点上旋转时,不会发生倾倒。FRI 通常用于评估机器人步态的稳定性,并用于步态规划和控制。
- FRI 的计算涉及多个因素,包括机器人脚的支撑面、质心位置、质心速度和地面反作用力等。通过分析这些因素,可以确定机器人行走时的稳定性,并根据需要调整步态。
计算FRI
要计算FRI,需要以下几个步骤:
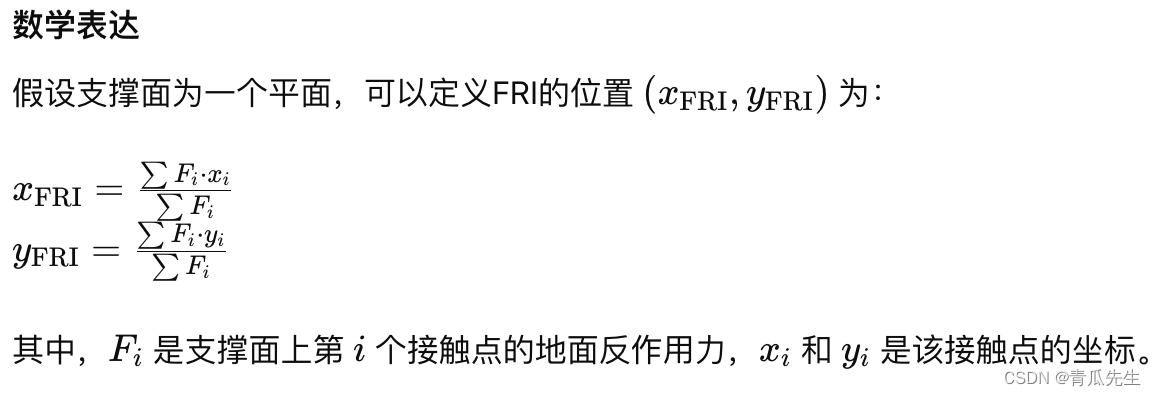
- 定义支撑面:确定机器人脚的支撑面,可以是脚底的一个平面。
- 计算质心位置和速度:质心位置和速度是描述机器人整体运动状态的重要参数。
- 计算地面反作用力:地面反作用力可以通过传感器测量得到,用于评估机器人是否稳定。
- 确定FRI位置:通过分析质心、速度和地面反作用力,计算FRI的位置。
示例:FRI在步态规划中的应用
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 步态控制之足旋转点(Foot Rotation Indicator, FRI)

发表评论 取消回复