ROS 获取激光雷达数据(C++实现)
实现思路
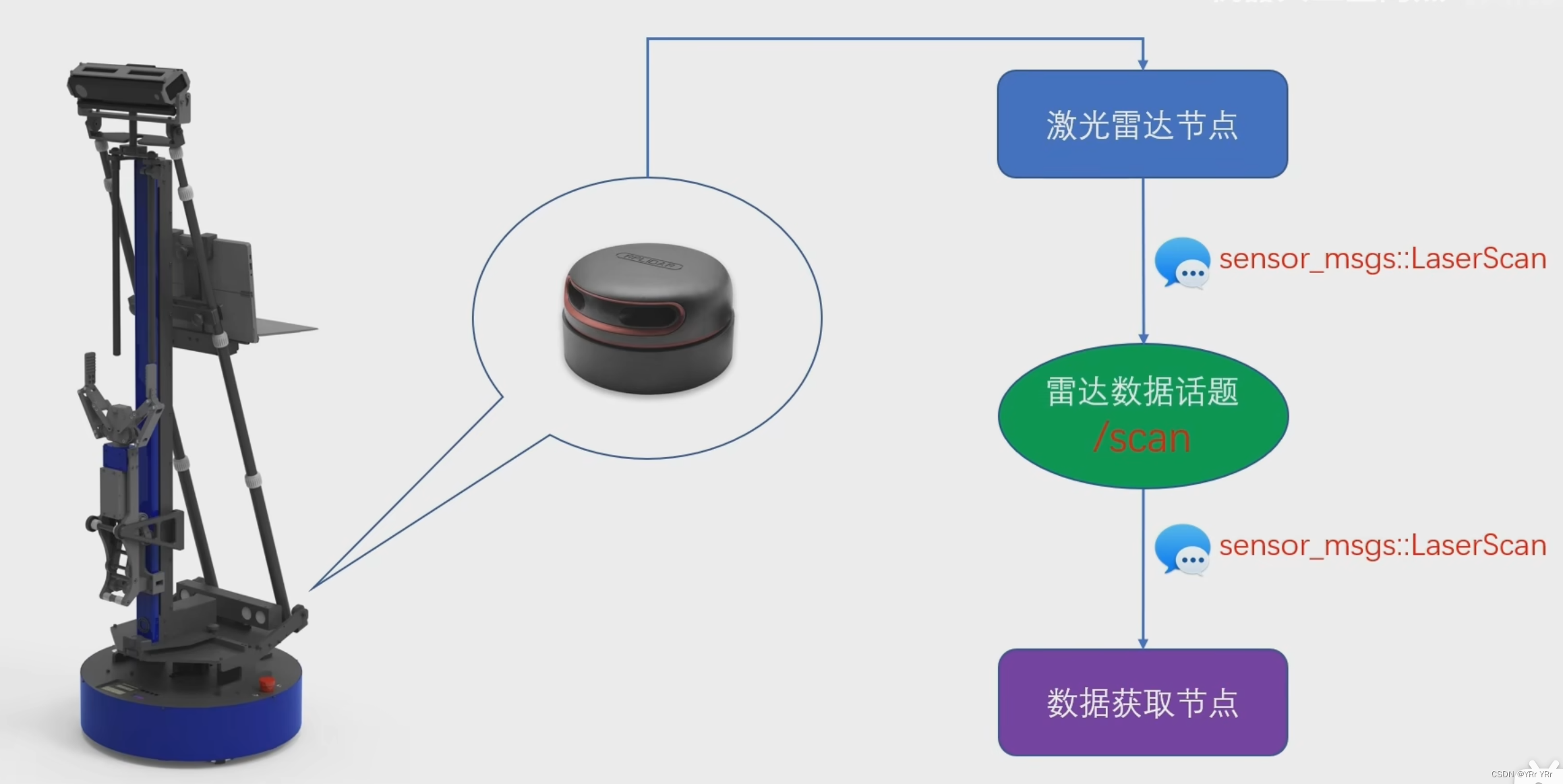
- 在机器人ROS系统中,激光雷达通常会有一个对应的节点,这个节点一般是由雷达的厂商提供,我们只需要简单的配置以下端口参数,就能和激光雷达的电路系统建立连接,雷达的测距数值从电路系统传递到雷达节点,然后会封装成一个消息包,发布在一个Topic话题中,我们只需要订阅这个话题,就能获取激光雷达的数据了,这个消息包的格式就是上一节介绍的LaserScan格式,发布消息包的话题名称也是约定俗成的,叫做/scan。
- 构建一个新的软件包,包名叫做lidar_pkg
- 在软件包中新建一个节点,节点名叫做lidar_node
- 在节点中,向ROS大管家NodeHandle申请订阅话题/scan,并设置回调函数为LidarCallback()
- 构建回调函数LidarCallback(),用来接受和处理雷达数据
- 调用ROS_INFO()显示雷达检测到的前方障碍物的距离
代码示例
要用C++实现一个ROS节点,以获取并处理激光雷达(LiDAR)数据,你需要按照以下步骤操作:
-
确保已经创建了ROS包:
- 如果还没有创建ROS包,请首先创建一个。例如,可以使用命令
catkin_create_pkg my_lidar_package roscpp sensor_msgs创建一个包含roscpp和sensor_msgs依赖的新包。
- 如果还没有创建ROS包,请首先创建一个。例如,可以使用命令
-
编写节点代码:
- 在包的
src文件夹中创建一个新的C++文件,例如lidar_node.cpp。 - 编写代码以订阅激光雷达数据。
- 在包的
-
修改
CMakeLists.txt:- 确保
CMakeLists.txt文件正确配置,以便能够编译新节点。
- 确保
-
编译并运行节点:
- 在catkin工作区中编译包,并运行节点。
示例代码:lidar_node.cpp
以下是lidar_node.cpp的一个简单示例,该节点订阅名为/scan的激光雷达话题,并在接收到数据时打印消息:
#include <ros/ros.h>
#include <sensor_msgs/LaserScan.h>
void scanCallback(const sensor_msgs::LaserScan::ConstPtr& scan) {
int num_readings = scan->ranges.size();
ROS_INFO("Received %d laser scan readings", num_readings);
// 这里可以添加更多处理激光雷达数据的代码
}
int main(int argc, char **argv) {
ros::init(argc, argv, "lidar_listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe<sensor_msgs::LaserScan>("/scan", 1000, scanCallback);
ros::spin();
return 0;
}
修改CMakeLists.txt
在CMakeLists.txt文件中,添加以下内容以确保节点被正确编译:
add_executable(lidar_listener src/lidar_node.cpp)
target_link_libraries(lidar_listener ${catkin_LIBRARIES})
add_dependencies(lidar_listener ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
编译和运行节点
-
编译包:
- 在catkin工作空间的根目录下运行
catkin_make。
- 在catkin工作空间的根目录下运行
-
运行节点:
- 首先,确保ROS核心已经运行:
roscore。 - 在新的终端中运行节点:
rosrun my_lidar_package lidar_listener
- 首先,确保ROS核心已经运行:
在运行此节点时,它将订阅/scan话题。每当接收到新的激光雷达数据时,它会打印出接收到的测量值数量。请确保你的激光雷达设备或相应的仿真器正在运行,并发布到/scan话题。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » ROS 获取激光雷达数据(C++实现)

发表评论 取消回复