前面文章:Apollo9.0 PNC源码学习之Control模块(一)
本文将对具体控制器以及原理做一个剖析
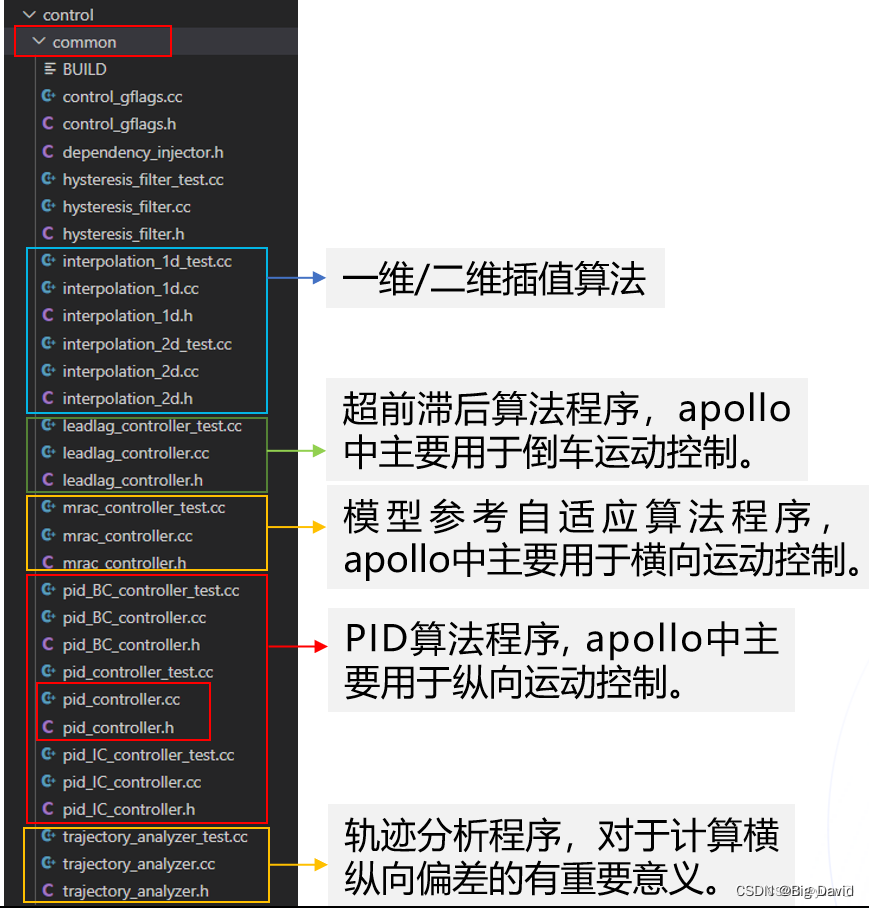
1 PID控制器
1.1 PID理论基础
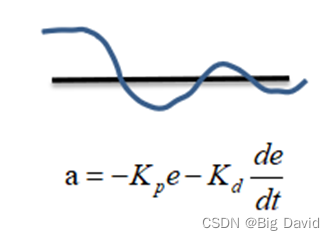
如下图所示,PID各参数(Kp,Ki,Kd)的作用:
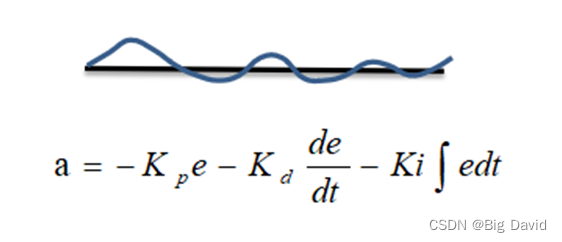
PID控制器的比例单元 ( P) 、积分单元(I)和微分单元(D)分别对应目前误差、过去累计误差及未来误差。若是不知道受控系统的特性,一般认为PID控制器是最适用的控制器。
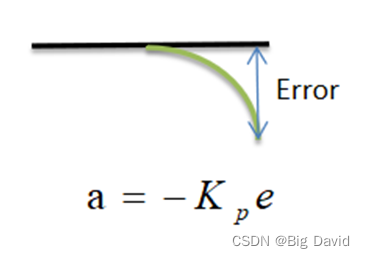
P:增大比例加快系统的响应,它的作用于输出值较快,但不能很好稳定在一个理想的数值。Kp过大,会产生超调,并产生振荡。
I:在P的基础上消除余差,对稳定后有累积误差的系统进行误差修整,减小稳态误差。
D:可以使系统超调量减小,减小振荡,增加稳定性。
位置式PID:当前系统的实际位置,与你想要达到的预期位置的偏差,进行PID控制
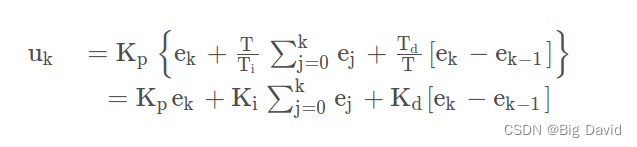
位置式PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,一旦误差开始反向变化,系统需要一定时间从饱和区退出,所以在u(k)达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅。
抗积分饱和:如果上一次的输出控制量超过了饱和值,饱和值为正,则这一次只积分负的偏差,饱和值为负,则这一次只积分正的偏差,从而避免系统长期留在饱和区!
1.2 Apollo的经典PID源码
modules/control/control_component/proto/pid_conf.proto
syntax = "proto2";
package apollo.control;
message PidConf {
optional bool integrator_enable = 1;
optional double integrator_saturation_level = 2;
optional double kp = 3;
optional double ki = 4;
optional double kd = 5;
optional double kaw = 6 [default = 0.0];
optional double output_saturation_level = 7;
}
pid_controller.h
#pragma once
#include "modules/control/control_component/proto/pid_conf.pb.h"
namespace apollo {
namespace control {
class PIDController {
public:
// 初始化pid控制器
void Init(const PidConf &pid_conf);
// 设置pid参数
void SetPID(const PidConf &pid_conf);
// 重置pid
void Reset();
// 重置积分项
void Reset_integral();
// PID控制实现(误差+采样时间)
virtual double Control(const double error, const double dt);
// 默认虚析构函数
virtual ~PIDController() = default;
// 获取积分器(Integrator)的过饱和状态
int IntegratorSaturationStatus() const;
// 检查积分器(Integrator)是否处于保持状态
bool IntegratorHold() const;
// 设置积分器(Integrator)是否保持当前值
void SetIntegratorHold(bool hold);
protected:
double kp_ = 0.0;
double ki_ = 0.0;
double kd_ = 0.0;
double kaw_ = 0.0;
double previous_error_ = 0.0;
double previous_output_ = 0.0;
double integral_ = 0.0;
double integrator_saturation_high_ = 0.0;
double integrator_saturation_low_ = 0.0;
bool first_hit_ = false;
bool integrator_enabled_ = false;
bool integrator_hold_ = false;
int integrator_saturation_status_ = 0;
// Only used for pid_BC_controller and pid_IC_controller
double output_saturation_high_ = 0.0;
double output_saturation_low_ = 0.0;
int output_saturation_status_ = 0;
};
} // namespace control
} // namespace apollo
pid_controller.cc
#include "modules/control/control_component/controller_task_base/common/pid_controller.h"
#include <cmath>
#include "cyber/common/log.h"
namespace apollo {
namespace control {
double PIDController::Control(const double error, const double dt) {
// 如果dt小于等于0,使用上一次输出
if (dt <= 0) {
AWARN << "dt <= 0, will use the last output, dt: " << dt;
return previous_output_;
}
double diff = 0; // 差值
double output = 0;// 输出
// 如果是第一次运行
if (first_hit_) {
first_hit_ = false;
} else {
// 计算差值
diff = (error - previous_error_) / dt;
}
// 积分 如果不启用积分,积分置为零
if (!integrator_enabled_) {
integral_ = 0;
} else if (!integrator_hold_) {
// 计算积分
integral_ += error * dt * ki_;
// 在积分之前应用Ki,以避免在稳态时改变Ki时的阶梯效应
if (integral_ > integrator_saturation_high_) {
// 如果积分大于饱和上限,将积分设置为饱和上限
integral_ = integrator_saturation_high_;
// 设置饱和状态为1
integrator_saturation_status_ = 1;
} else if (integral_ < integrator_saturation_low_) {
// 如果积分小于饱和下限,将积分设置为饱和下限
integral_ = integrator_saturation_low_;
// 设置饱和状态为-1
integrator_saturation_status_ = -1;
} else {
// 如果积分在饱和范围内,设置饱和状态为0
integrator_saturation_status_ = 0;
}
}
// 更新previous_error_
previous_error_ = error;
// 计算输出
output = error * kp_ + integral_ + diff * kd_; // Ki already applied
// 更新previous_output_
previous_output_ = output;
return output;
}
// 重置积分项
void PIDController::Reset_integral() {
integral_ = 0.0;
integrator_saturation_status_ = 0;
}
// 重置PID控制器
void PIDController::Reset() {
previous_error_ = 0.0;
previous_output_ = 0.0;
integral_ = 0.0;
first_hit_ = true;
integrator_saturation_status_ = 0;
output_saturation_status_ = 0;
}
// 初始化控制器
void PIDController::Init(const PidConf &pid_conf) {
previous_error_ = 0.0;
previous_output_ = 0.0;
integral_ = 0.0;
first_hit_ = true;
integrator_enabled_ = pid_conf.integrator_enable();
integrator_saturation_high_ =
std::fabs(pid_conf.integrator_saturation_level());
integrator_saturation_low_ =
-std::fabs(pid_conf.integrator_saturation_level());
integrator_saturation_status_ = 0;
integrator_hold_ = false;
output_saturation_high_ = std::fabs(pid_conf.output_saturation_level());
output_saturation_low_ = -std::fabs(pid_conf.output_saturation_level());
output_saturation_status_ = 0;
SetPID(pid_conf);
}
// 设置PID参数
void PIDController::SetPID(const PidConf &pid_conf) {
kp_ = pid_conf.kp();
ki_ = pid_conf.ki();
kd_ = pid_conf.kd();
kaw_ = pid_conf.kaw();
}
// 积分饱和状态
int PIDController::IntegratorSaturationStatus() const {
return integrator_saturation_status_;
}
// 是否积分保持
bool PIDController::IntegratorHold() const { return integrator_hold_; }
// 设置积分保持(true or false)
void PIDController::SetIntegratorHold(bool hold) { integrator_hold_ = hold; }
} // namespace control
} // namespace apollo
以上对经典PID的源码进行了剖析,额外对百度Apollo采用其他PID算法进行源码讲解
1.3 pid_IC_controller
pid_IC_controller.h
#pragma once
#include "modules/control/control_component/proto/pid_conf.pb.h"
#include "modules/control/control_component/controller_task_base/common/pid_controller.h"
namespace apollo {
namespace control {
// 该类继承于PIDController
class PIDICController : public PIDController {
public:
// PIDICController控制
virtual double Control(const double error, const double dt);
// 输出饱和状态
virtual int OutputSaturationStatus();
private:
};
} // namespace control
} // namespace apollo
pid_IC_controller.cc
#include "modules/control/control_component/controller_task_base/common/pid_IC_controller.h"
#include <cmath>
#include <iostream>
#include "cyber/common/log.h"
#include "modules/common/math/math_utils.h"
namespace apollo {
namespace control {
double PIDICController::Control(const double error, const double dt) {
// 如果dt小于等于0,使用上一次输出
if (dt <= 0) {
AWARN << "dt <= 0, will use the last output";
return previous_output_;
}
double diff = 0; // 差值
double output = 0;// 输出
// 如果是第一次运行
if (first_hit_) {
first_hit_ = false;
} else {
diff = (error - previous_error_) / dt;
}
// integral clamping
// 积分限幅
if (!integrator_enabled_) {
integral_ = 0;
} else {
double u = error * kp_ + integral_ + error * dt * ki_ + diff * kd_;
// 如果error和u同一方向 输出u在饱和范围外,不更新积分项
if (((error * u) > 0) &&
((u > output_saturation_high_) || (u < output_saturation_low_))) {
} else {
// Only update integral then
// 仅仅更新积分
integral_ += error * dt * ki_;
}
}
// 更新previous_error_
previous_error_ = error;
output = error * kp_ + integral_ + diff * kd_;
if (output >= output_saturation_high_) {
output_saturation_status_ = 1;
} else if (output <= output_saturation_low_) {
output_saturation_status_ = -1;
} else {
output_saturation_status_ = 0;
}
// 限制output在输出饱和范围内
output = common::math::Clamp(error * kp_ + integral_ + diff * kd_,
output_saturation_high_,
output_saturation_low_); // Ki already applied
previous_output_ = output;
return output;
}
// 返回输出饱和状态
int PIDICController::OutputSaturationStatus() {
return output_saturation_status_;
}
} // namespace control
} // namespace apollo
1.4 pid_BC_controller
反向计算pid
pid_BC_controller.h
#pragma once
#include "modules/control/control_component/proto/pid_conf.pb.h"
#include "modules/control/control_component/controller_task_base/common/pid_controller.h"
namespace apollo {
namespace control {
class PIDBCController : public PIDController {
public:
virtual double Control(const double error, const double dt);
virtual int OutputSaturationStatus();
private:
};
} // namespace control
} // namespace apollo
pid_BC_controller.cc
#include "modules/control/control_component/controller_task_base/common/pid_BC_controller.h"
#include <cmath>
#include "cyber/common/log.h"
#include "modules/common/math/math_utils.h"
namespace apollo {
namespace control {
// PIDBCController控制
double PIDBCController::Control(const double error, const double dt) {
// 如果dt小于等于0,使用上一次输出
if (dt <= 0) {
AWARN << "dt <= 0, will use the last output";
return previous_output_;
}
double diff = 0;
double output = 0;
if (first_hit_) {
first_hit_ = false;
} else {
diff = (error - previous_error_) / dt;
}
// backward calculation 反向计算
if (!integrator_enabled_) { // 如果积分器未启用,则将积分设置为0
integral_ = 0;
} else {
double u = error * kp_ + integral_ + error * dt * ki_ + diff * kd_;
// 本人认为aw_term是计算超出u的值,然后根据aw_term判断输出饱和状态
double aw_term = common::math::Clamp(u, output_saturation_high_,
output_saturation_low_) -
u;
if (aw_term > 1e-6) {
output_saturation_status_ = -1;
} else if (aw_term < -1e-6) {
output_saturation_status_ = 1;
} else {
output_saturation_status_ = 0;
}
// 计算积分
integral_ += kaw_ * aw_term + error * dt;
}
// 更新previous_error_
previous_error_ = error;
// 限制输出在输出饱和状态内
output = common::math::Clamp(error * kp_ + integral_ + diff * kd_,
output_saturation_high_,
output_saturation_low_); // Ki already applied
previous_output_ = output;
return output;
}
// 返回输出饱和状态
int PIDBCController::OutputSaturationStatus() {
return output_saturation_status_;
}
} // namespace control
} // namespace apollo
2 超前滞后控制器leadlag_controller
主要用于倒车运动控制
2.1 超前滞后控制器源码解析
leadlag_controller.h
#pragma once
#include "modules/control/control_component/proto/leadlag_conf.pb.h"
namespace apollo {
namespace control {
class LeadlagController {
public:
// 初始化
void Init(const LeadlagConf &leadlag_conf, const double dt);
// 设置leadlag alpha, beta and tau
void SetLeadlag(const LeadlagConf &leadlag_conf);
// 双线性变换离散化方法(T型积分:曲线包围面积用梯形估算)
// 把连续的控制器系数离散化
void TransformC2d(const double dt);
// 重置超前滞后控制器
void Reset();
// 超前滞后也是类似PID输入参数error和dt
virtual double Control(const double error, const double dt);
// 获取饱和状态
int InnerstateSaturationStatus() const;
protected:
// 连续时间控制系数
double alpha_ = 0.0;
double beta_ = 0.0;
double tau_ = 0.0;
double Ts_ = 0.01; // 默认0.01s
// 离散时间控制系数
double kn1_ = 0.0;
double kn0_ = 0.0;
double kd1_ = 0.0;
double kd0_ = 0.0;
// Inner (intermedia) state in discrete-time domain at Direct Form II
double previous_output_ = 0.0;
double previous_innerstate_ = 0.0;
double innerstate_ = 0.0;
double innerstate_saturation_high_ = 0.0;
double innerstate_saturation_low_ = 0.0;
int innerstate_saturation_status_ = 0;
// 是否启用从连续时间到离散时间的转换
bool transfromc2d_enabled_ = false;
};
} // namespace control
} // namespace apollo
leadlag_controller.cc
#include "modules/control/control_component/controller_task_base/common/leadlag_controller.h"
#include <cmath>
#include "cyber/common/log.h"
namespace apollo {
namespace control {
double LeadlagController::Control(const double error, const double dt) {
// check if the c2d transform passed during the initilization
// 判断连续转离散是否成功
if (!transfromc2d_enabled_) {// 失败则重新进行TransformC2d
TransformC2d(dt);
if (!transfromc2d_enabled_) { // 再次失败,则发出警告
AWARN << "C2d transform failed; will work as a unity compensator, dt: "
<< dt;
return error; // treat the Lead/Lag as a unity proportional controller
}
}
// check if the current sampling time is valid
// 检查步长dt是否小于等于零
if (dt <= 0.0) {
AWARN << "dt <= 0, will use the last output, dt: " << dt;
return previous_output_;
}
double output = 0.0;
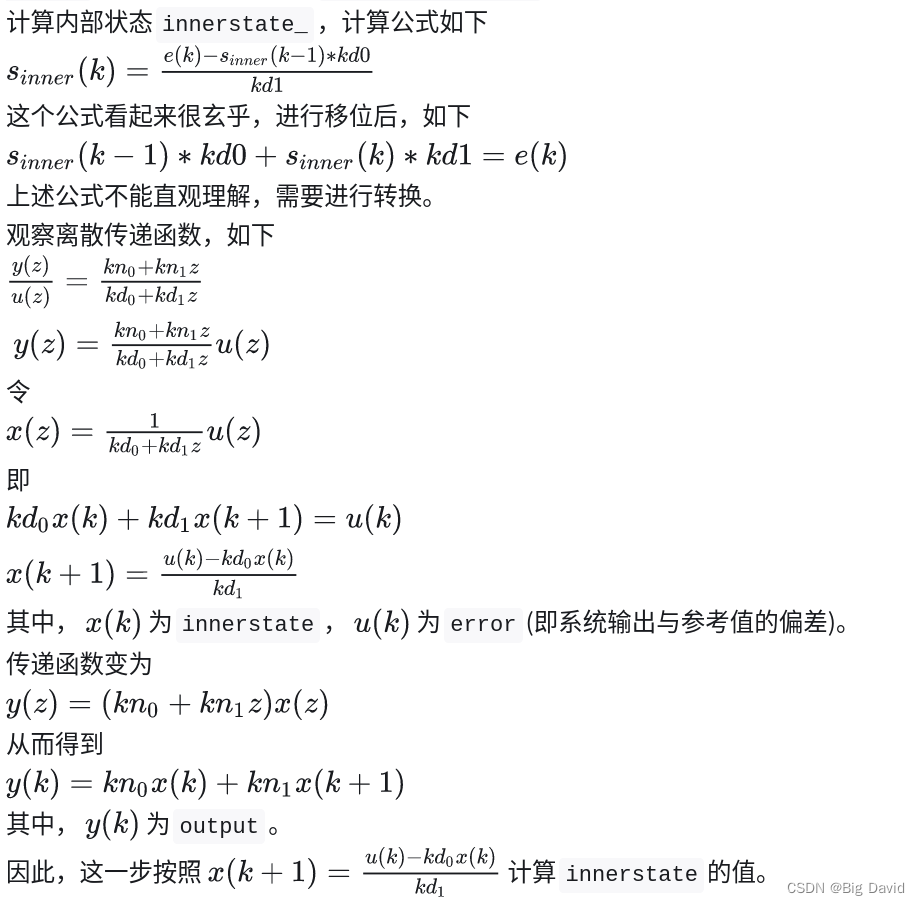
// 计算内部状态innerstate_
innerstate_ = (error - previous_innerstate_ * kd0_) / kd1_; // calculate
// the inner (intermedia) state under the Direct form II for the Lead / Lag
// compensator factorization
// 进行innerstate幅值判断:高于状态饱和上限,则等于状态饱和上限,并将状态饱和状态置1;
// 低于状态饱和下限,则等于状态饱和下限,并将状态饱和状态置-1;其余情况状态饱和状态置0
if (innerstate_ > innerstate_saturation_high_) {
innerstate_ = innerstate_saturation_high_;
innerstate_saturation_status_ = 1;
} else if (innerstate_ < innerstate_saturation_low_) {
innerstate_ = innerstate_saturation_low_;
innerstate_saturation_status_ = -1;
} else {
innerstate_saturation_status_ = 0;
}
// 计算输出
output = innerstate_ * kn1_ + previous_innerstate_ * kn0_;
// 更新previous_innerstate_
previous_innerstate_ = innerstate_;
// 更新previous_output_
previous_output_ = output;
return output;
}
void LeadlagController::Reset() {
previous_output_ = 0.0;
previous_innerstate_ = 0.0;
innerstate_ = 0.0;
innerstate_saturation_status_ = 0;
}
void LeadlagController::Init(const LeadlagConf &leadlag_conf, const double dt) {
// 前一输出
previous_output_ = 0.0;
// 前一内部状态
previous_innerstate_ = 0.0;
// 内部状态
innerstate_ = 0.0;
// 内部状态饱和上限
innerstate_saturation_high_ =
std::fabs(leadlag_conf.innerstate_saturation_level());
// 内部状态饱和下限
innerstate_saturation_low_ =
-std::fabs(leadlag_conf.innerstate_saturation_level());
// 内部状态饱和标志
innerstate_saturation_status_ = 0;
// 设置leadlag
SetLeadlag(leadlag_conf);
// 连续转离散 TransformC2d函数的作用是将连续形式的传递函数转换成离散形式的传递函数
TransformC2d(dt);
}
void LeadlagController::SetLeadlag(const LeadlagConf &leadlag_conf) {
alpha_ = leadlag_conf.alpha();
beta_ = leadlag_conf.beta();
tau_ = leadlag_conf.tau();
}
void LeadlagController::TransformC2d(const double dt) {
if (dt <= 0.0) {
AWARN << "dt <= 0, continuous-discrete transformation failed, dt: " << dt;
transfromc2d_enabled_ = false;
} else {
double a1 = alpha_ * tau_;
double a0 = 1.00;
double b1 = beta_ * tau_;
double b0 = beta_;
Ts_ = dt;
kn1_ = 2 * b1 + Ts_ * b0;
kn0_ = Ts_ * b0 - 2 * b1;
kd1_ = 2 * a1 + Ts_ * a0;
kd0_ = Ts_ * a0 - 2 * a1;
if (kd1_ <= 0.0) {
AWARN << "kd1 <= 0, continuous-discrete transformation failed, kd1: "
<< kd1_;
transfromc2d_enabled_ = false;
} else {
transfromc2d_enabled_ = true;
}
}
}
// 返回内部饱和状态
int LeadlagController::InnerstateSaturationStatus() const {
return innerstate_saturation_status_;
}
} // namespace control
} // namespace apollo
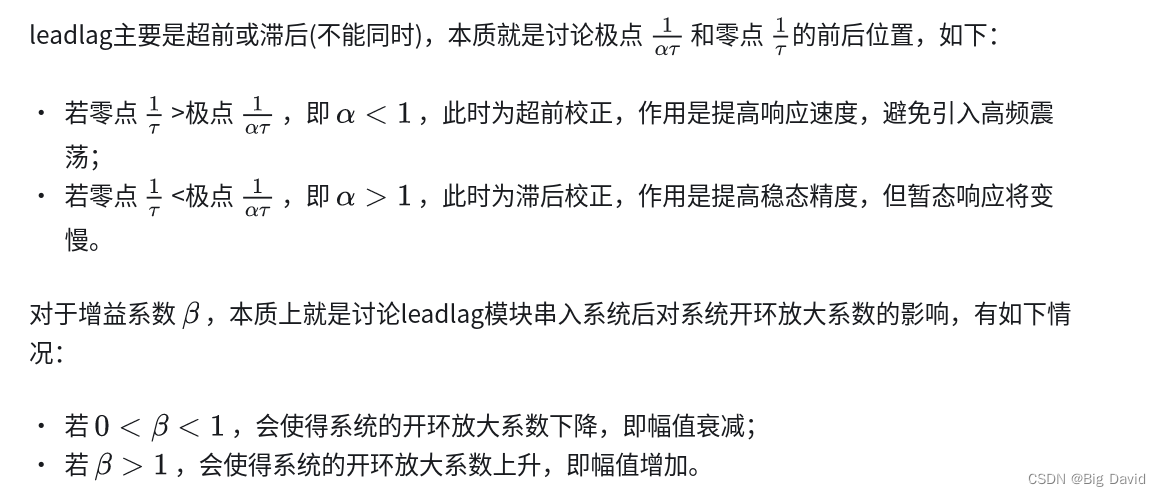
2.2 超前滞后控制器原理讲解
leadlag传递函数:
H
(
s
)
=
β
τ
s
+
1
τ
α
s
+
1
H(s)=\beta \frac{\tau s+1}{\tau \alpha s+1}
H(s)=βταs+1τs+1
其中,
τ
\tau
τ:时间常数
α
\alpha
α:超前滞后调节系数
β
\beta
β:开环增益系数
(
1
−
α
)
τ
(1-\alpha)\tau
(1−α)τ:需要超前或滞后的时间
当 α < 1 \alpha<1 α<1,有 τ > α τ \tau>\alpha\tau τ>ατ:超前补偿
当 α > 1 \alpha>1 α>1,有 τ < α τ \tau<\alpha\tau τ<ατ:滞后补偿
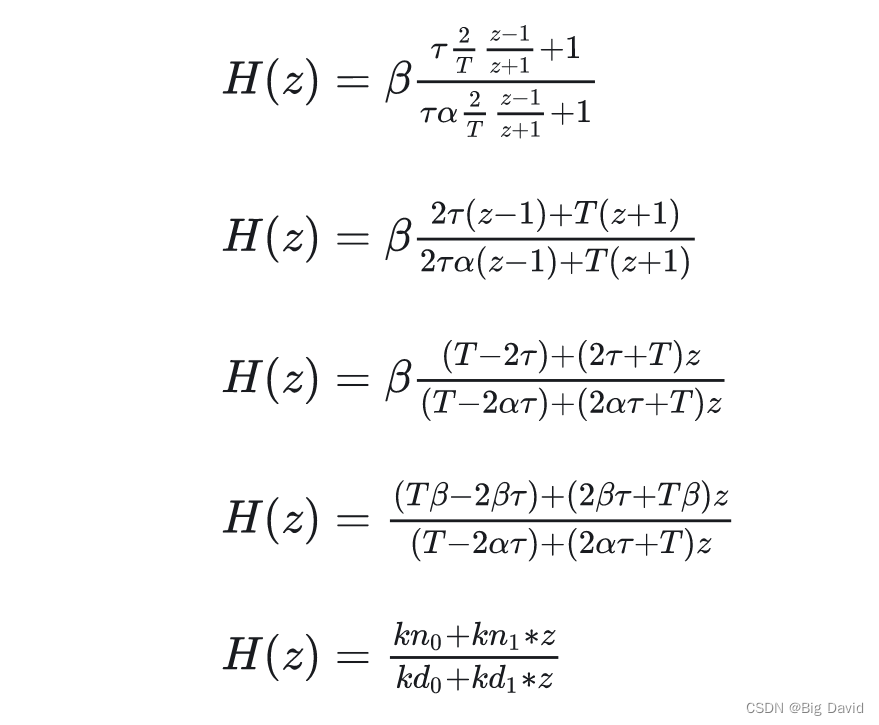
采用双线性变换,T为采样周期
s
=
2
T
z
−
1
z
+
1
s=\frac{2}{T} \frac{z-1}{z+1}
s=T2z+1z−1
α
1
=
α
τ
,
α
0
=
1.00
,
b
1
=
β
τ
,
b
0
=
β
\alpha1=\alpha\tau,\alpha0=1.00,b1=\beta\tau,b0=\beta
α1=ατ,α0=1.00,b1=βτ,b0=β
k n 1 = 2 β τ + T β kn_1=2\beta\tau+T\beta kn1=2βτ+Tβ
k n 0 = T β − 2 β τ kn_0=T\beta-2\beta\tau kn0=Tβ−2βτ
k d 1 = 2 α τ + T kd_1=2\alpha\tau+T kd1=2ατ+T
k d 0 = T − 2 α τ kd_0=T-2\alpha\tau kd0=T−2ατ
double a1 = alpha_ * tau_;
double a0 = 1.00;
double b1 = beta_ * tau_;
double b0 = beta_;
Ts_ = dt;
kn1_ = 2 * b1 + Ts_ * b0;
kn0_ = Ts_ * b0 - 2 * b1;
kd1_ = 2 * a1 + Ts_ * a0;
kd0_ = Ts_ * a0 - 2 * a1;
if (kd1_ <= 0.0) {
AWARN << "kd1 <= 0, continuous-discrete transformation failed, kd1: "
<< kd1_;
transfromc2d_enabled_ = false;
} else {
transfromc2d_enabled_ = true;
}
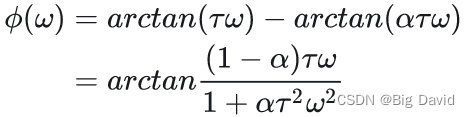
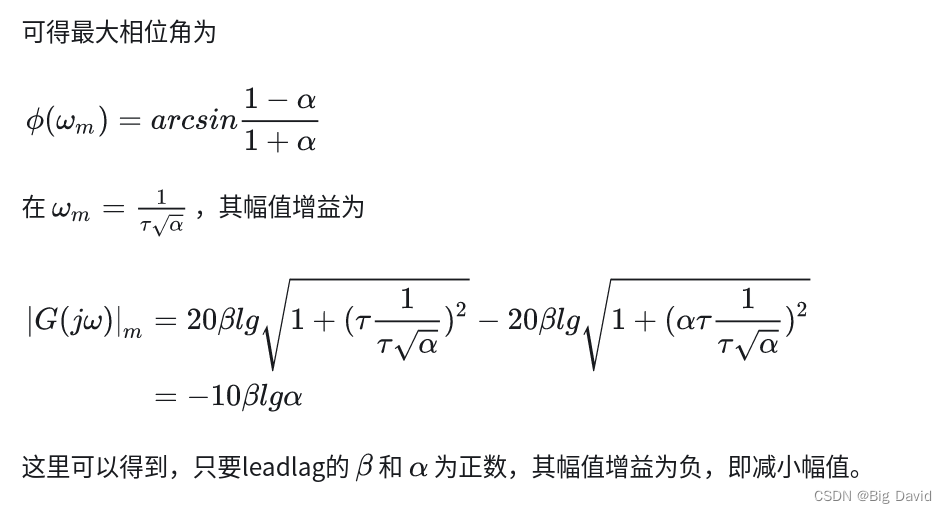
相位角和幅值:
超前-滞后补偿器的传递函数相角为:

参数分析:

innerstate_ = (error - previous_innerstate_ * kd0_) / kd1_;
3 Apollo的模型参考自适应控制MRAC
MRAC原理:一般用于百度Apollo横向控制
参考博客
MRAC控制系统的基本结构图
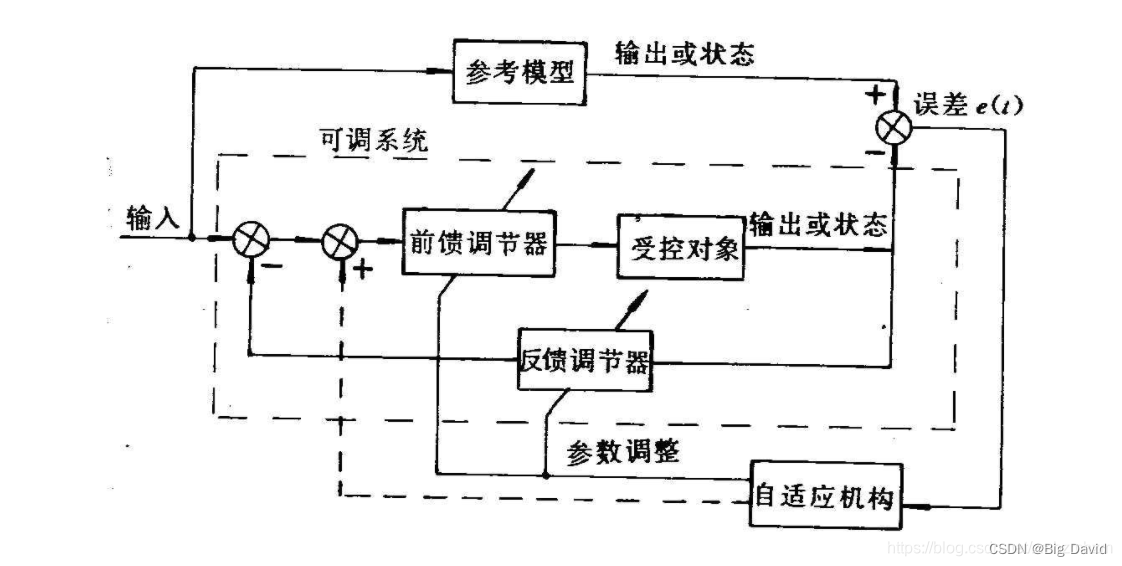
该系统是在常规的反馈控制回路上再附加一个参考模型和控制器参数的自动调节回路而形成。在该系统中,参考模型的输出或状态相当于给定一个动态性能指标,目标信号同时加在可调系统与参考模型上,通过比较受控对象与参考模型的输出或状态来得到两者之间的误差信息,按照一定的规律(自适应律)来修正控制器的参数(参数自适应)或产生一个辅助输入信号(信号综合自适应),从而使受控制对象的输出尽可能地跟随参考模型的输出
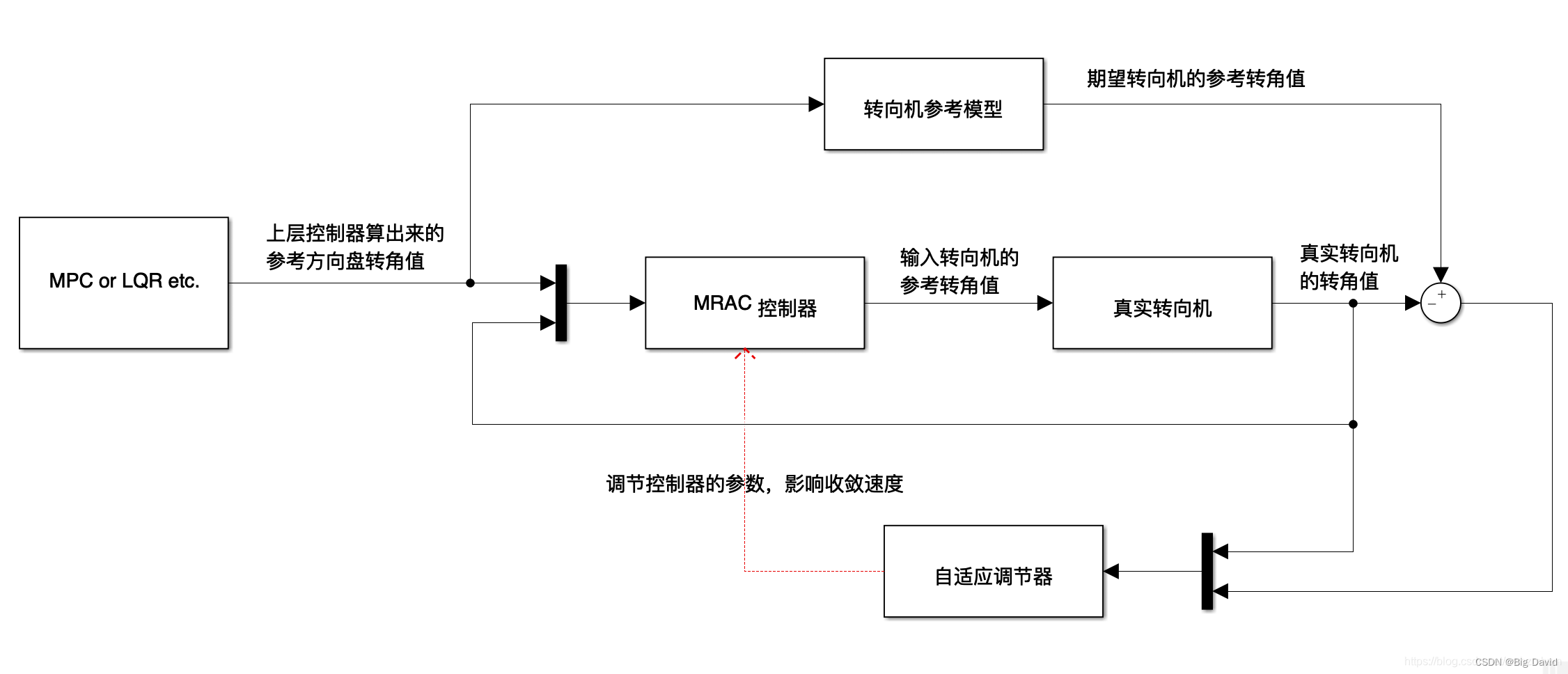
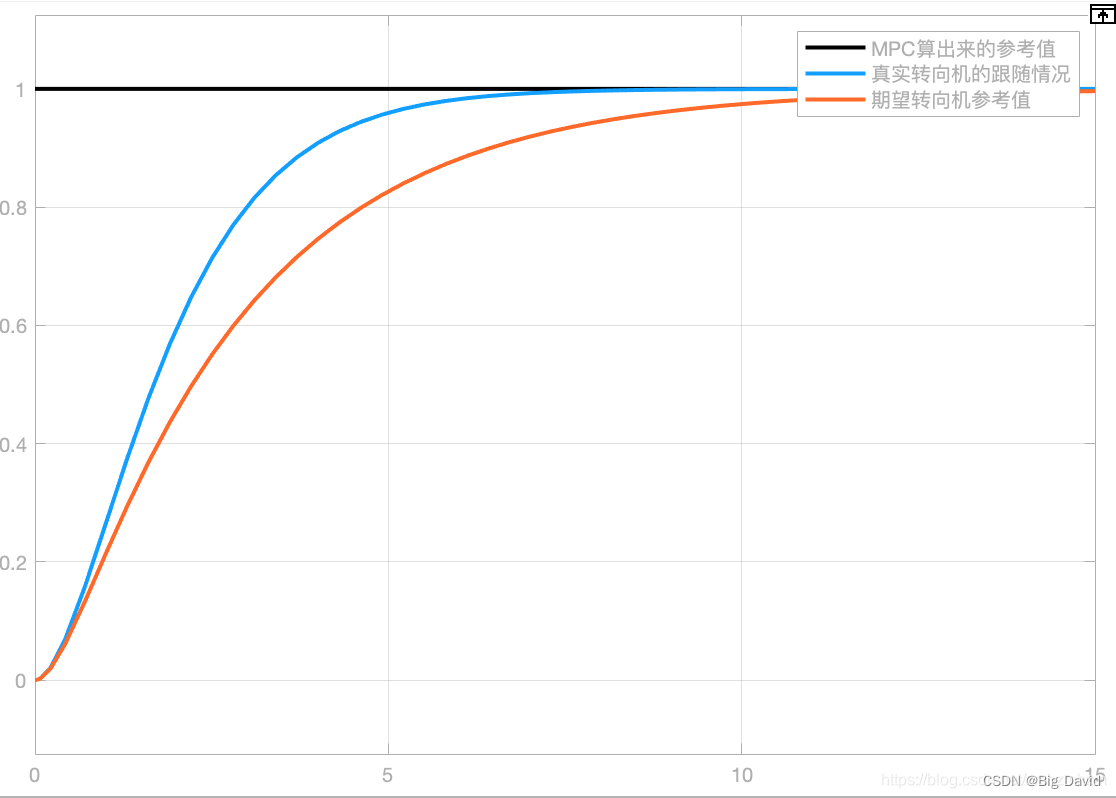
MRAC控制器收敛的并不是上层控制算法(MPC等)给出的参考方向盘转角值,而是收敛期望转向机算出来的参考转角值,让真实转向机的角度跟随期望转向机的角度。期望转向机的模型就是MRAC算法中的MR(参考模型),期望转向机的系数(阻尼比等)往往是设计者给定的,不一定要是接近于真实转向机,如果参考模型接近于真实模型,反而使得此算法变得没有意义。
为什么要用MRAC控制器?
为了让同一套上层控制算法(MPC等)在面对不同的真实转向机时,不受硬件参数差异的影响。比如现在有两台车,一台是博世的转向机,一台是国产转向机,两台转向机的阻尼比等系数都不同(模型不同),如果我设计一个期望的转向机参考模型,并用MRAC算法控制的话,那么这两台建模不同的转向机都会变成我设计的期望转向机的模型。这就是模型参考的意义。
设计的期望转向机的模型对信号的收敛速度应该是要低于真实转向机的。因为要使一个收敛快的转向机变得收敛慢是容易实现的,但要使一个收敛慢的转向机变得收敛快,往往难以克服机械硬件的限制
4 一维、二维插值算法
4.1 一维插值算法
interpolation_1d.h
#pragma once
#include <memory>
#include <utility>
#include <vector>
#include "Eigen/Core"
#include "unsupported/Eigen/Splines"
namespace apollo {
namespace control {
class Interpolation1D {
public:
typedef std::vector<std::pair<double, double>> DataType;
Interpolation1D() = default;
// 初始化
bool Init(const DataType& xy);
// 仅在[x_min,x_max]之间插值x
// 对于超出范围的x,将返回起始或结束y值。
double Interpolate(double x) const;
private:
// 将X值缩小到[0,1]
double ScaledValue(double x) const;
Eigen::RowVectorXd ScaledValues(Eigen::VectorXd const& x_vec) const;
double x_min_ = 0.0;
double x_max_ = 0.0;
double y_start_ = 0.0;
double y_end_ = 0.0;
// 一维“点”的样条曲线
std::unique_ptr<Eigen::Spline<double, 1>> spline_;
};
} // namespace control
} // namespace apollo
interpolation_1d.cc
#include "modules/control/control_component/controller_task_base/common/interpolation_1d.h"
#include <algorithm>
#include "cyber/common/log.h"
namespace apollo {
namespace control {
const double kDoubleEpsilon = 1e-6;
// 初始化插值器
bool Interpolation1D::Init(const DataType& xy) {
if (xy.empty()) {
AERROR << "empty input.";
return false;
}
auto data(xy);
std::sort(data.begin(), data.end());
Eigen::VectorXd x(data.size());
Eigen::VectorXd y(data.size());
for (unsigned i = 0; i < data.size(); ++i) {
x(i) = data[i].first;
y(i) = data[i].second;
}
x_min_ = data.front().first;
x_max_ = data.back().first;
y_start_ = data.front().second;
y_end_ = data.back().second;
// 在此处进行插值拟合。X值需要在此处进行缩放到[0, 1]
spline_.reset(new Eigen::Spline<double, 1>(
Eigen::SplineFitting<Eigen::Spline<double, 1>>::Interpolate(
y.transpose(),
// 插值多项式不超过三次,但接受短向量
static_cast<Eigen::DenseIndex>(std::min<size_t>(x.size() - 1, 3)),
ScaledValues(x))));
return true;
}
// 使用插值器进行插值
double Interpolation1D::Interpolate(double x) const {
if (x < x_min_) {
return y_start_;
}
if (x > x_max_) {
return y_end_;
}
// 提取插值值时,x值也需要进行缩放
return (*spline_)(ScaledValue(x))(0);
}
// x就被转换成了一个0到1之间的值
double Interpolation1D::ScaledValue(double x) const {
// 避免除以零的错误
if (std::fabs(x_max_ - x_min_) < kDoubleEpsilon) {
return x_min_;
}
return (x - x_min_) / (x_max_ - x_min_);
}
// 原向量中元素经过ScaledValue函数处理后的结果
Eigen::RowVectorXd Interpolation1D::ScaledValues(
Eigen::VectorXd const& x_vec) const {
return x_vec.unaryExpr([this](double x) { return ScaledValue(x); })
.transpose();
}
} // namespace control
} // namespace apollo
4.2 二维插值算法
interpolation_2d.h
#pragma once
#include <map>
#include <memory>
#include <tuple>
#include <utility>
#include <vector>
namespace apollo {
namespace control {
/**
* @class Interpolation2D
*
* @brief linear interpolation from key (double, double) to one double value.
*/
class Interpolation2D {
public:
typedef std::vector<std::tuple<double, double, double>> DataType;
typedef std::pair<double, double> KeyType;
Interpolation2D() = default;
bool Init(const DataType &xyz);
// 从二维关键点(两个double类型值,通常表示空间中的x和y坐标)到一个double值
double Interpolate(const KeyType &xy) const;
private:
// 一个double到double的映射表,表示z值与y值之间的关系
double InterpolateYz(const std::map<double, double> &yz_table,
double y) const;
// 处理两个值(value_before和value_after)和它们对应的分段距离,计算并返回在给定区间内的插值结果
double InterpolateValue(const double value_before, const double dist_before,
const double value_after,
const double dist_after) const;
std::map<double, std::map<double, double>> xyz_;
};
} // namespace control
} // namespace apollo
interpolation_2d.cc
#include "modules/control/control_component/controller_task_base/common/interpolation_2d.h"
#include <cmath>
#include "cyber/common/log.h"
namespace {
const double kDoubleEpsilon = 1.0e-6;
} // namespace
namespace apollo {
namespace control {
bool Interpolation2D::Init(const DataType &xyz) {
if (xyz.empty()) {
AERROR << "empty input.";
return false;
}
// 对于每个元素t,提取其x、y和z坐标
for (const auto &t : xyz) {
xyz_[std::get<0>(t)][std::get<1>(t)] = std::get<2>(t);
}
return true;
}
// 函数接收一个键类型(KeyType)的xy参数,用于查找并进行二维空间中的插值计算。这里使用了双线性插值方法
double Interpolation2D::Interpolate(const KeyType &xy) const {
// 获取数据集中最大和最小的x值,加上一个很小的容差kDoubleEpsilon防止比较时的精度问题
double max_x = xyz_.rbegin()->first;
double min_x = xyz_.begin()->first;
// 如果输入的x值大于等于最大x减去一个小误差,表示接近最高点,进行y-z方向的插值
if (xy.first >= max_x - kDoubleEpsilon) {
return InterpolateYz(xyz_.rbegin()->second, xy.second);
}
// 同理,如果输入的x值小于等于最小x加上小误差,表示接近最低点,进行y-z方向的插值
if (xy.first <= min_x + kDoubleEpsilon) {
return InterpolateYz(xyz_.begin()->second, xy.second);
}
// 在数据集中找到输入x值对应的索引之后的元素(近似大于等于的元素)
auto itr_after = xyz_.lower_bound(xy.first);
// 同样找到索引之前的元素(近似小于的元素)
auto itr_before = itr_after;
// 如果不是第一个元素,则向前移动一位
if (itr_before != xyz_.begin()) {
--itr_before;
}
// 计算输入x值前后的z值
double x_before = itr_before->first;
double z_before = InterpolateYz(itr_before->second, xy.second);
double x_after = itr_after->first;
double z_after = InterpolateYz(itr_after->second, xy.second);
// 计算输入x值与前两个x值之间的差
double x_diff_before = std::fabs(xy.first - x_before);
double x_diff_after = std::fabs(xy.first - x_after);
// 最后使用差值和对应的z值执行双线性插值
return InterpolateValue(z_before, x_diff_before, z_after, x_diff_after);
}
double Interpolation2D::InterpolateYz(const std::map<double, double> &yz_table,
double y) const {
if (yz_table.empty()) {
AERROR << "Unable to interpolateYz because yz_table is empty.";
return y;
}
double max_y = yz_table.rbegin()->first;
double min_y = yz_table.begin()->first;
if (y >= max_y - kDoubleEpsilon) {
return yz_table.rbegin()->second;
}
if (y <= min_y + kDoubleEpsilon) {
return yz_table.begin()->second;
}
auto itr_after = yz_table.lower_bound(y);
auto itr_before = itr_after;
if (itr_before != yz_table.begin()) {
--itr_before;
}
double y_before = itr_before->first;
double z_before = itr_before->second;
double y_after = itr_after->first;
double z_after = itr_after->second;
double y_diff_before = std::fabs(y - y_before);
double y_diff_after = std::fabs(y - y_after);
return InterpolateValue(z_before, y_diff_before, z_after, y_diff_after);
}
// 二维插值函数
double Interpolation2D::InterpolateValue(const double value_before,
const double dist_before,
const double value_after,
const double dist_after) const {
// 如果前一个点到目标点的距离小于一个很小的阈值,则直接返回前一个点的值,避免除零错误
if (dist_before < kDoubleEpsilon) {
return value_before;
}
// 如果后一个点到目标点的距离小于一个很小的阈值,则直接返回后一个点的值,避免除零错误
if (dist_after < kDoubleEpsilon) {
return value_after;
}
// 计算前一个点与后一个点之间的值的差距
double value_gap = value_after - value_before;
// 根据距离权重计算插值的中间值
double value_buff = value_gap * dist_before / (dist_before + dist_after);
// 返回插值结果
return value_before + value_buff;
}
} // namespace control
} // namespace apollo
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » Apollo9.0 PNC源码学习之Control模块(二)

发表评论 取消回复