一、无人机模型介绍
单个无人机三维路径规划问题及其建模_无人机路径规划场景建模-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
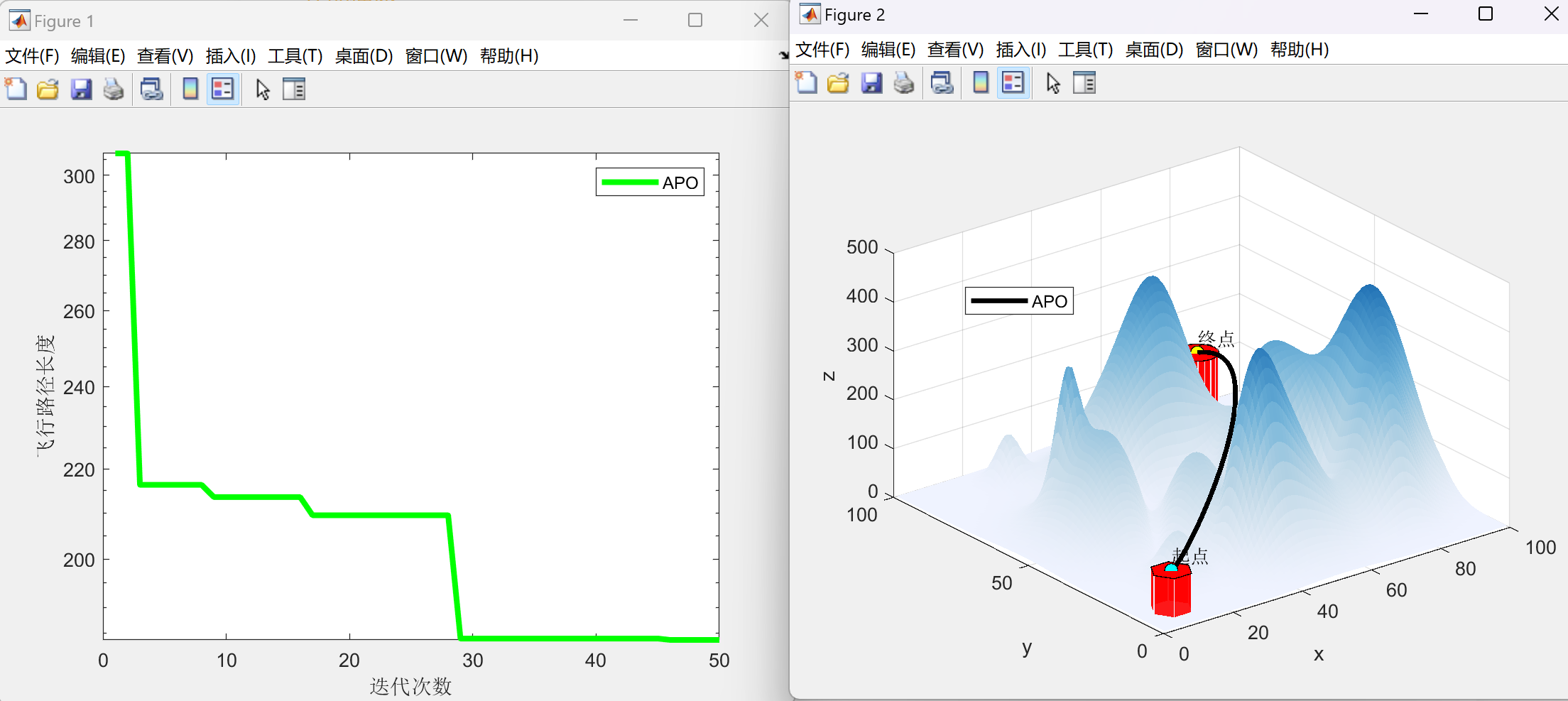
二、人工原生动物优化算法APO求解无人机路径规划
人工原生动物优化器(Artificial Protozoa Optimizer ,APO)由Xiaopeng Wang等人于2024年提出,其灵感来自自然界中的原生动物。APO 模拟了原生动物的觅食、休眠和繁殖行为。
参考文献
[1]Wang X, Snášel V, Mirjalili S, et al. Artificial Protozoa Optimizer (APO): A novel bio-inspired metaheuristic algorithm for engineering optimization[J]. Knowledge-Based Systems, 2024: 111737.
close all
clear
clc
addpath('./Algorithm/')%添加算法路径
warning off;
%% 三维路径规划模型定义
global startPos goalPos N
N=2;%待优化点的个数(可以修改)
startPos = [10, 10, 80]; %起点(可以修改)
goalPos = [80, 90, 150]; %终点(可以修改)
SearchAgents_no=30; % 种群大小(可以修改)
Function_name='F2'; %F1:随机产生地图 F2:导入固定地图
Max_iteration=50; %最大迭代次数(可以修改)
% Load details of the selected benchmark function
[lb,ub,dim,fobj]=Get_Functions_details(Function_name);
[Best_score,Best_pos,curve]=AlgorithmName(SearchAgents_no,Max_iteration,lb,ub,dim,fobj);%算法优化求解
figure
semilogy(curve,'Color','g','linewidth',3)
xlabel('迭代次数');
ylabel('飞行路径长度');
legend(AlgorithmName)
display(['算法得到的最优适应度: ', num2str(Best_score)]);
Position=[Best_pos(1:dim/3); Best_pos(1+dim/3:2*(dim/3)); Best_pos(1+(2*dim/3):end)]'; %优化点的XYZ坐标(每一行是一个点)
plotFigure(Best_pos,AlgorithmName)%画最优路径
无人机路径坐标:
1.0000000e+01 1.0000000e+01 8.0000000e+01
1.1580906e+01 1.1067762e+01 8.2574066e+01
1.3075643e+01 1.2035826e+01 8.5053477e+01
1.4486872e+01 1.2908021e+01 8.7440232e+01
1.5817257e+01 1.3688178e+01 8.9736335e+01
1.7069461e+01 1.4380125e+01 9.1943786e+01
1.8246148e+01 1.4987691e+01 9.4064588e+01
1.9349980e+01 1.5514706e+01 9.6100741e+01
2.0383621e+01 1.5964998e+01 9.8054248e+01
2.1349733e+01 1.6342399e+01 9.9927110e+01
2.2250980e+01 1.6650735e+01 1.0172133e+02
2.3090026e+01 1.6893838e+01 1.0343890e+02
2.3869532e+01 1.7075535e+01 1.0508184e+02
2.4592163e+01 1.7199657e+01 1.0665214e+02
2.5260582e+01 1.7270033e+01 1.0815180e+02
2.5877451e+01 1.7290491e+01 1.0958283e+02
2.6445434e+01 1.7264862e+01 1.1094722e+02
2.6967194e+01 1.7196974e+01 1.1224698e+02
2.7445394e+01 1.7090657e+01 1.1348411e+02
2.7882697e+01 1.6949740e+01 1.1466061e+02
2.8281766e+01 1.6778052e+01 1.1577848e+02
2.8645265e+01 1.6579423e+01 1.1683972e+02
2.8975857e+01 1.6357682e+01 1.1784635e+02
2.9276205e+01 1.6116658e+01 1.1880035e+02
2.9548971e+01 1.5860180e+01 1.1970373e+02
2.9796820e+01 1.5592078e+01 1.2055849e+02
3.0022413e+01 1.5316181e+01 1.2136663e+02
3.0228416e+01 1.5036318e+01 1.2213015e+02
3.0417490e+01 1.4756319e+01 1.2285106e+02
3.0592298e+01 1.4480012e+01 1.2353136e+02
3.0755504e+01 1.4211228e+01 1.2417305e+02
3.0909772e+01 1.3953795e+01 1.2477813e+02
3.1057763e+01 1.3711542e+01 1.2534859e+02
3.1202142e+01 1.3488300e+01 1.2588646e+02
3.1345571e+01 1.3287896e+01 1.2639371e+02
3.1490714e+01 1.3114161e+01 1.2687237e+02
3.1640233e+01 1.2970924e+01 1.2732442e+02
3.1796793e+01 1.2862014e+01 1.2775187e+02
3.1963055e+01 1.2791260e+01 1.2815672e+02
3.2141683e+01 1.2762491e+01 1.2854098e+02
3.2335341e+01 1.2779538e+01 1.2890664e+02
3.2546692e+01 1.2846228e+01 1.2925570e+02
3.2778397e+01 1.2966392e+01 1.2959018e+02
3.3033122e+01 1.3143859e+01 1.2991206e+02
3.3313529e+01 1.3382457e+01 1.3022336e+02
3.3622280e+01 1.3686017e+01 1.3052606e+02
3.3962040e+01 1.4058367e+01 1.3082219e+02
3.4335471e+01 1.4503337e+01 1.3111372e+02
3.4745237e+01 1.5024756e+01 1.3140268e+02
3.5194000e+01 1.5626453e+01 1.3169105e+02
3.5684424e+01 1.6312258e+01 1.3198084e+02
3.6219172e+01 1.7086000e+01 1.3227406e+02
3.6800907e+01 1.7951508e+01 1.3257270e+02
3.7432292e+01 1.8912611e+01 1.3287877e+02
3.8115990e+01 1.9973139e+01 1.3319426e+02
3.8854665e+01 2.1136921e+01 1.3352118e+02
3.9650980e+01 2.2407787e+01 1.3386153e+02
4.0507598e+01 2.3789565e+01 1.3421731e+02
4.1427181e+01 2.5286084e+01 1.3459053e+02
4.2412394e+01 2.6901175e+01 1.3498318e+02
4.3465898e+01 2.8638666e+01 1.3539727e+02
4.4590358e+01 3.0502386e+01 1.3583479e+02
4.5788437e+01 3.2496166e+01 1.3629776e+02
4.7062798e+01 3.4623834e+01 1.3678817e+02
4.8416103e+01 3.6889219e+01 1.3730801e+02
4.9851016e+01 3.9296151e+01 1.3785931e+02
5.1370200e+01 4.1848459e+01 1.3844405e+02
5.2976319e+01 4.4549972e+01 1.3906424e+02
5.4672035e+01 4.7404520e+01 1.3972187e+02
5.6460011e+01 5.0415932e+01 1.4041896e+02
5.8342912e+01 5.3588036e+01 1.4115750e+02
6.0323399e+01 5.6924663e+01 1.4193950e+02
6.2404136e+01 6.0429642e+01 1.4276695e+02
6.4587786e+01 6.4106802e+01 1.4364186e+02
6.6877013e+01 6.7959972e+01 1.4456623e+02
6.9274479e+01 7.1992982e+01 1.4554205e+02
7.1782847e+01 7.6209660e+01 1.4657134e+02
7.4404782e+01 8.0613836e+01 1.4765610e+02
7.7142945e+01 8.5209340e+01 1.4879831e+02
8.0000000e+01 9.0000000e+01 1.5000000e+02
算法得到的最优适应度: 183.6215
三、完整MATLAB代码
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 无人机航迹规划:人工原生动物优化器(Artificial Protozoa Optimizer ,APO)求解无人机路径规划,提供MATLAB代码

发表评论 取消回复