第4章 存储器
笔记PDF版本已上传至Github个人仓库:CourseNotes,欢迎fork和star,拥抱开源,一起完善。
该笔记是最初是没打算发网上的,所以很多地方都为了自我阅读方便,我理解了的地方就少有解释;我不理解的地方理解后加上的解释便很多。
因此,若读者在阅读过程中遇到错误或理解问题,请评论区留言或者私信,我们一起讨论:看到会及时回复。
4.1 概述
4.1.1 存储器分类
-
按存储介质分类:
- 半导体存储器:TTL,集成度低,功耗高,速度快,MOS反之
- 磁表面存储器:磁头、载磁体(磁盘,磁带)
- 磁芯储存器:硬磁材料、环状元件
- 光盘存储器:激光、磁光材料·
-
按存取方式分类:
-
随机储存器(Random Access Memory,RAM)
RAM是一种可读/写存储器,其特点:①随机存取性;②存取时间与存储单元的物理位置无关:访问存储器的任一物理单元的时间均相等。③易失性
根据存储信息原理的不同分类:RAM又分为静态RAM(以触发器原理寄存信息)和动态RAM(以电容充放电原理寄存信息)。
-
只读储存器(Read Only Memory,ROM)
特点:①存储内容只能读不能重新写;②非易失性
应用:存放固定不变的程序、常数和汉字字库,甚至用于操作系统的固化;它与随机存储器可共同作为主存的一部分,统一构成主存的地址域。
后来发展的ROM存储器:
- 掩模型只读存储器(MaskedROM,MROM)
- 可编程只读存储器(Programmable ROM,PROM)
- 可擦除可编程只读存储器(Erasable Programmable ROM,EPROM)
- 电擦除可编程只读存储器(Electrically-ErasableProgrammableROM,EEPROM)
- 闪速存储器FlashMemory
-
串行访问存储器(存储时间与物理地址有关)
对存储单元进行读/写操作时,需按其物理位置的先后顺序寻找地址,存取时间与物理位置有关,则这种存储器称为串行访问存储器。
- 顺序存取存储器:磁带
- 直接(半顺序)存取存储器:磁盘
-
-
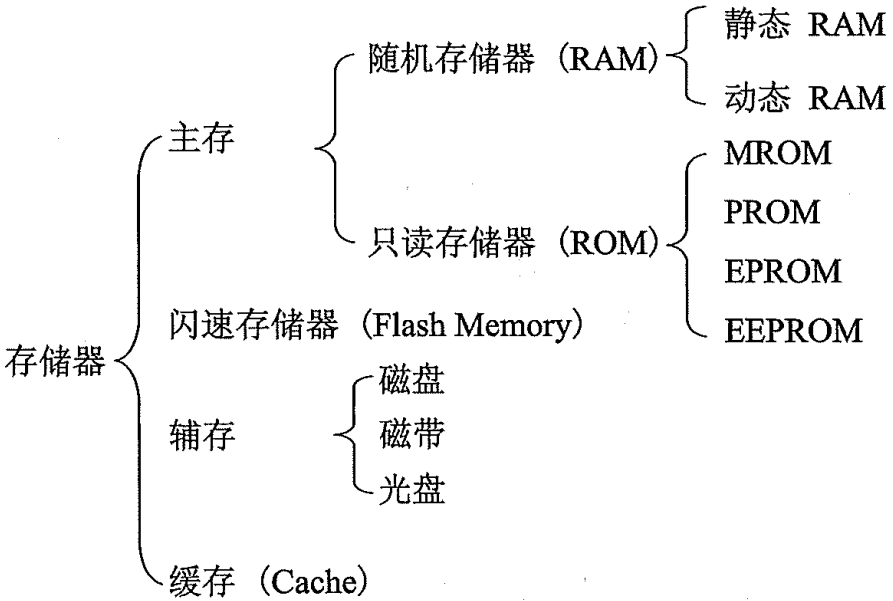
按在计算机中的作用分类:
按在计算机系统中的作用不同,存储器主要分为主存储器、辅助存储器、缓冲存储器。
按照这种方法分类,其直观分类可从下图得知:
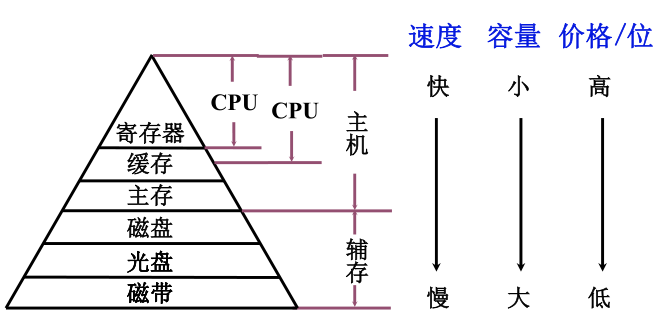
4.1.2 存储器的层次结构
- 存储器速度、容量和 位价的关系图
-
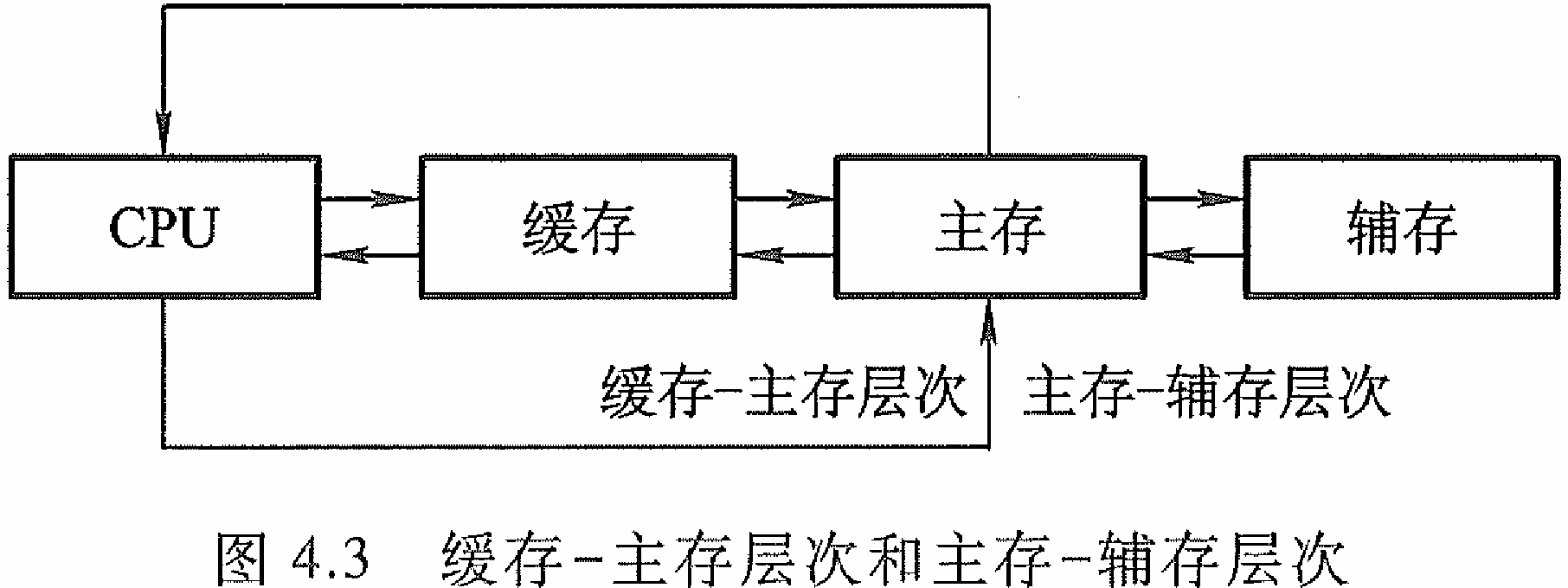
缓存-主存层次和主存-辅存层次图
- 主存和缓存之间匹配的是速度,它们之间的数据调动是由硬件自动完成的
- 主存和辅存之间匹配的是容量,它们之间的数据调动是 由硬件和操作系统共同完成的。
4.2 主存储器
4.2.1 概述
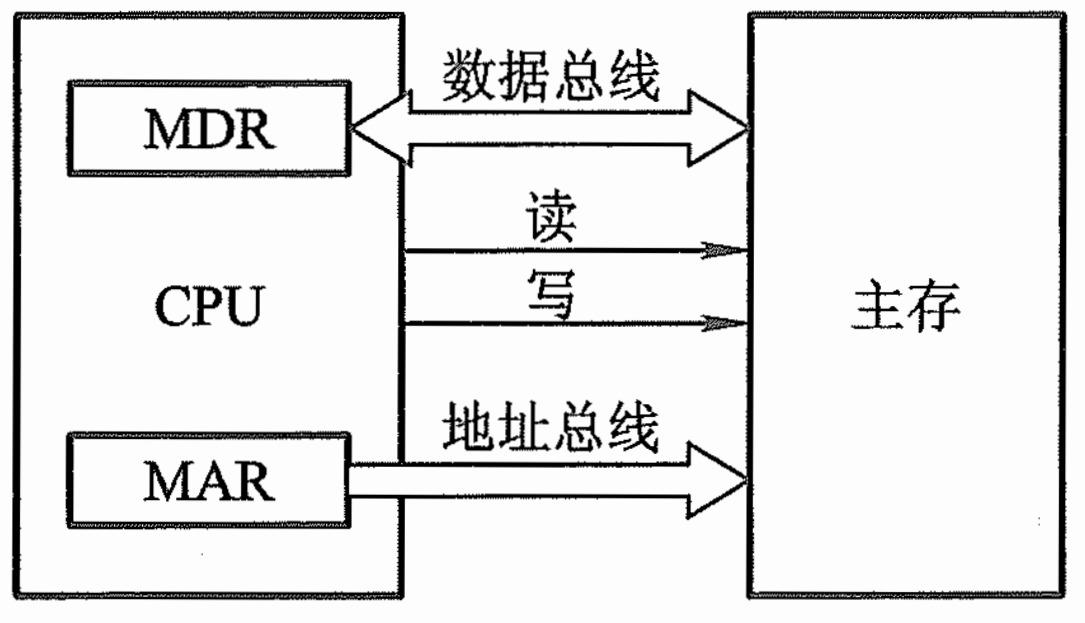
- 现代计算机的主存都由半导体集成电路构成,,MAR和MDR制作在CPU芯片内,如下图所示。下图中虽然MAR和MDR是在CPU内部,但是这并不代表内存的MAR和MDR在CPU中。下图的MDR和MAR为CPU的器件,主存有但未画出来。
-
寻址范围计算
- 按字节寻址范围计算为【 2 地址线位数 2^\text{地址线位数} 2地址线位数】Byte
- 按字寻址范围计算为【 2 地址线范围 × 8 字长 \frac{2^\text{地址线范围}\times8}{字长} 字长2地址线范围×8】bit
-
主存的技术指标
-
存储容量:指主存能存放二进制代码的总位数
①存储容量=存储单元个数x存储字长 (以位数表示)
②存储容量=存储单元个数x存储字长/8 (以字节表示) -
存储速度
存储速度是由存取时间和存取周期来表示
-
存取时间
存取时间又称为存储器的访问时间(Memory Access Time),是指启动一次存储器操作(读或写)到完成该操作所需的全部时间。
存取时间分读出时间和写人时间两种。读出时间是从存储器接收到有效地址开始,到产生有效输出所需的全部时间。写人时间是从存储器接收到有效地址开始,到数据写人被选中单元为止所需的全部时间。
-
存取周期
存取周期(Memory Cycle Time)是指存储器进行连续两次独立的存储器操作(如连续两次读操作)所需的最小间隔时间
-
-
存储器带宽
表示单位时间内存储器存取的信息量,如下例:存取周期为500ns,每个存取周期可访问16位,则它的带宽为32M位/秒,计算如下
32 Mbit/s = 16 b i t 500 × 1 0 − 9 s 32\text{Mbit/s}=\frac{16bit}{500\times10^{-9}s} 32Mbit/s=500×10−9s16bit为了提高存储器的带宽,可以采用以下措施:
① 缩短存取周期。
②)增加存储字长,使每个存取周期可读/写更多的二进制位数。
③增加存储体
-
4.2.2 半导体存储芯片简介
-
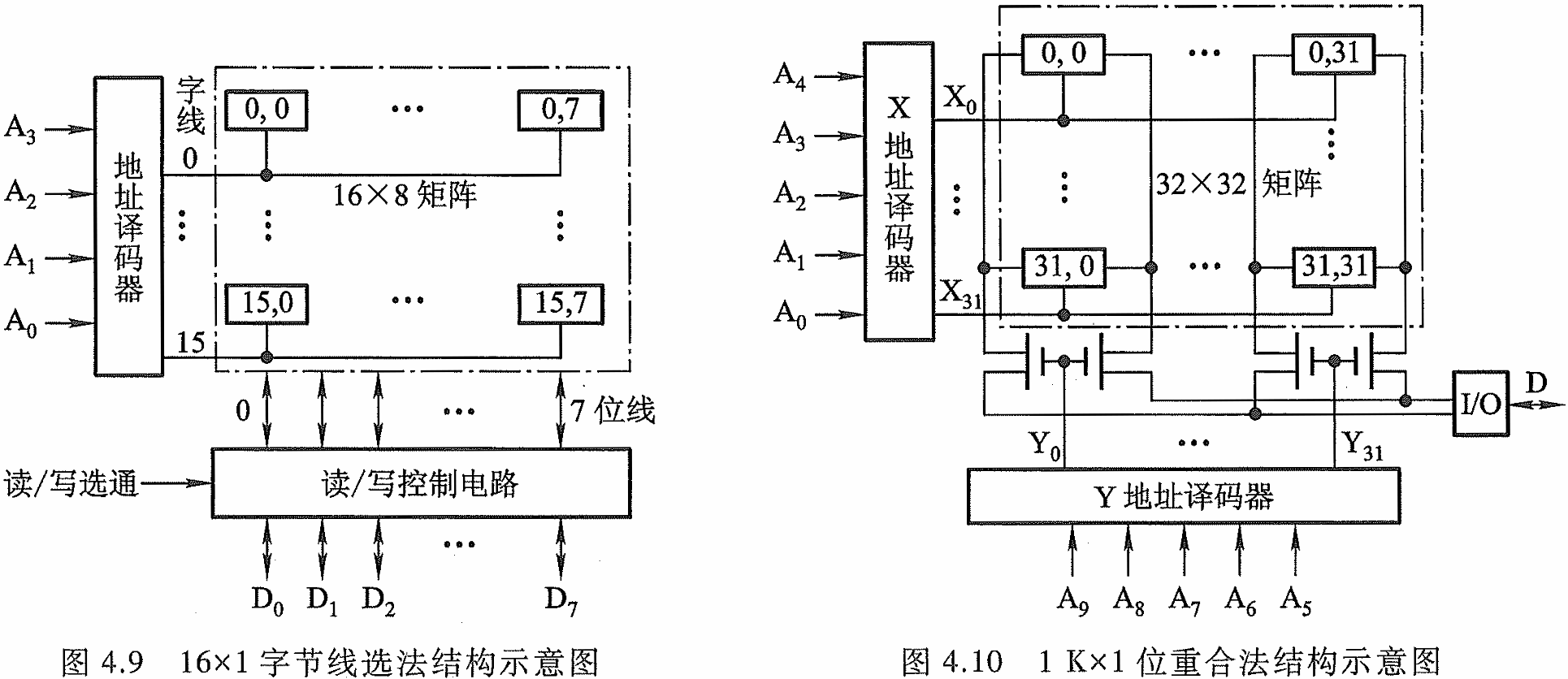
半导体存储芯片的译码驱动方式有两种:线选法和重合法
-
控制线
-
片选线:用来选择存储芯片
-
CS ‾ \overline{\text{CS}} CS:片选线,低电平有效
-
CE ‾ \overline{\text{CE}} CE:使能线,低电平有效
-
-
读/写控制线:决定芯片进行读/写操作
- WE ‾ \overline{\text{WE}} WE:低电平写 高电平读
-
4.2.3 随机存储器
-
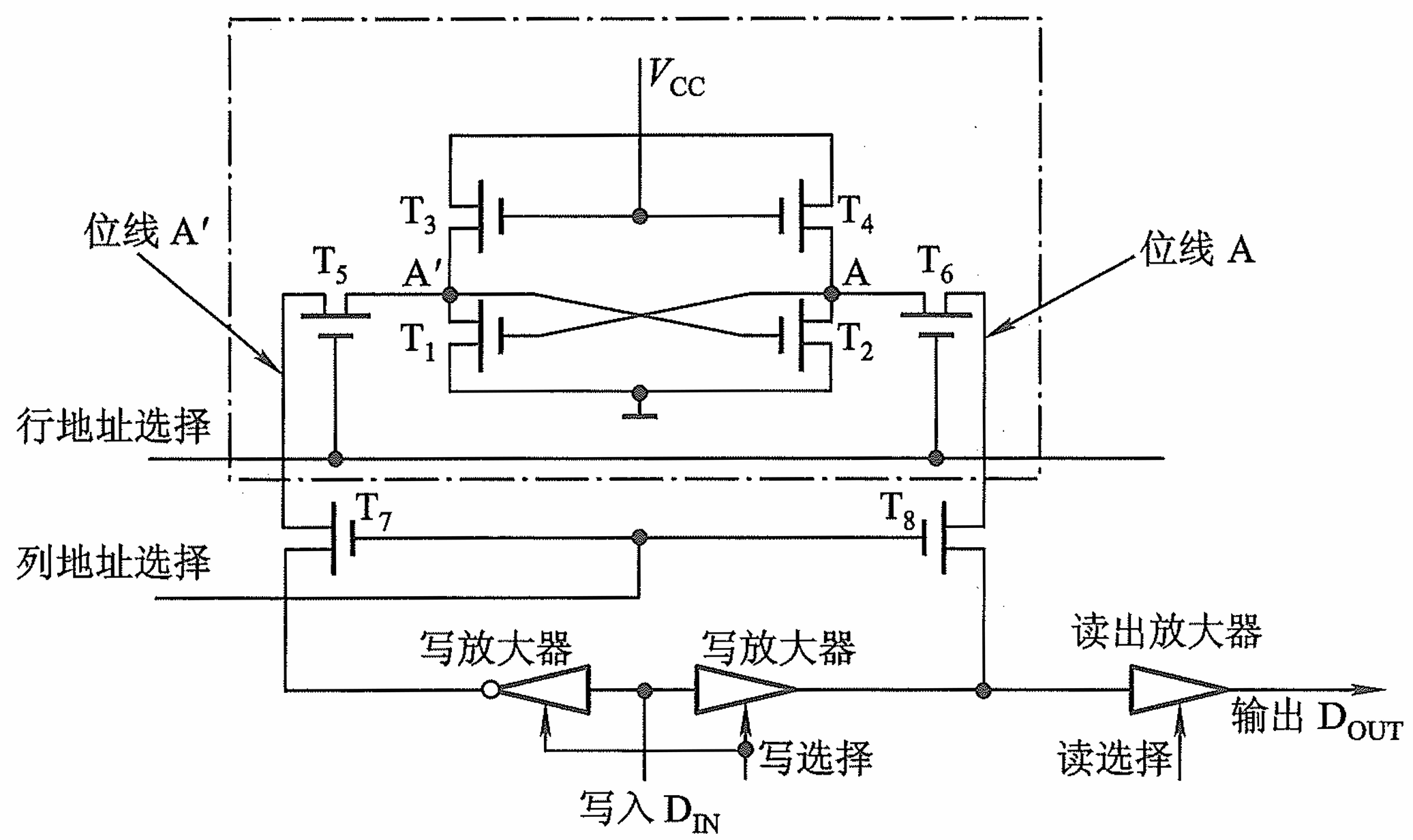
静态 RAM(Static RAM, SRAM)
由千静态 RAM是用触发器工作原理存储信息的,因此即使信息读出后,它仍保持其原状 态,不需要再生。但电源掉电时,原存信息丢失,故它属易失性半导体存储器。
读出时, V C C V_{CC} VCC家电, T 3 T_3 T3和 T 4 T_4 T4开关都闭合电路连通;接着A‘和A同时加电, T 1 T_1 T1和 T 2 T_2 T2闭合,数据从存储芯片内流向A与A’(两侧数据是一致的); T 5 T_5 T5和 T 6 T_6 T6从行地址选择线上获取行地址, T 7 T_7 T7和 T 8 T_8 T8从列地址选择线上获取列地址,此时两侧数据流通;左侧数据流通至左侧写放大器后反向,无法通过;右侧数据不经过放大器直接送到 D OUT \text{D}_\text{OUT} DOUT中。
写入时,数据经过左侧放大器将取反,右侧正常通过;我们选择好行地址与列地址,打开两侧通路。当数据到达A‘与A的时候有两种情况:
- ① D IN \text{D}_\text{IN} DIN为1,则A’为0,A为1,此时 T 2 T_2 T2断开, T 1 T_1 T1连接,正常写入1;
- ② D IN \text{D}_\text{IN} DIN为0,则A‘为1,A为0,此时 T 1 T_1 T1断开, T 2 T_2 T2连接,正常写入0.
-
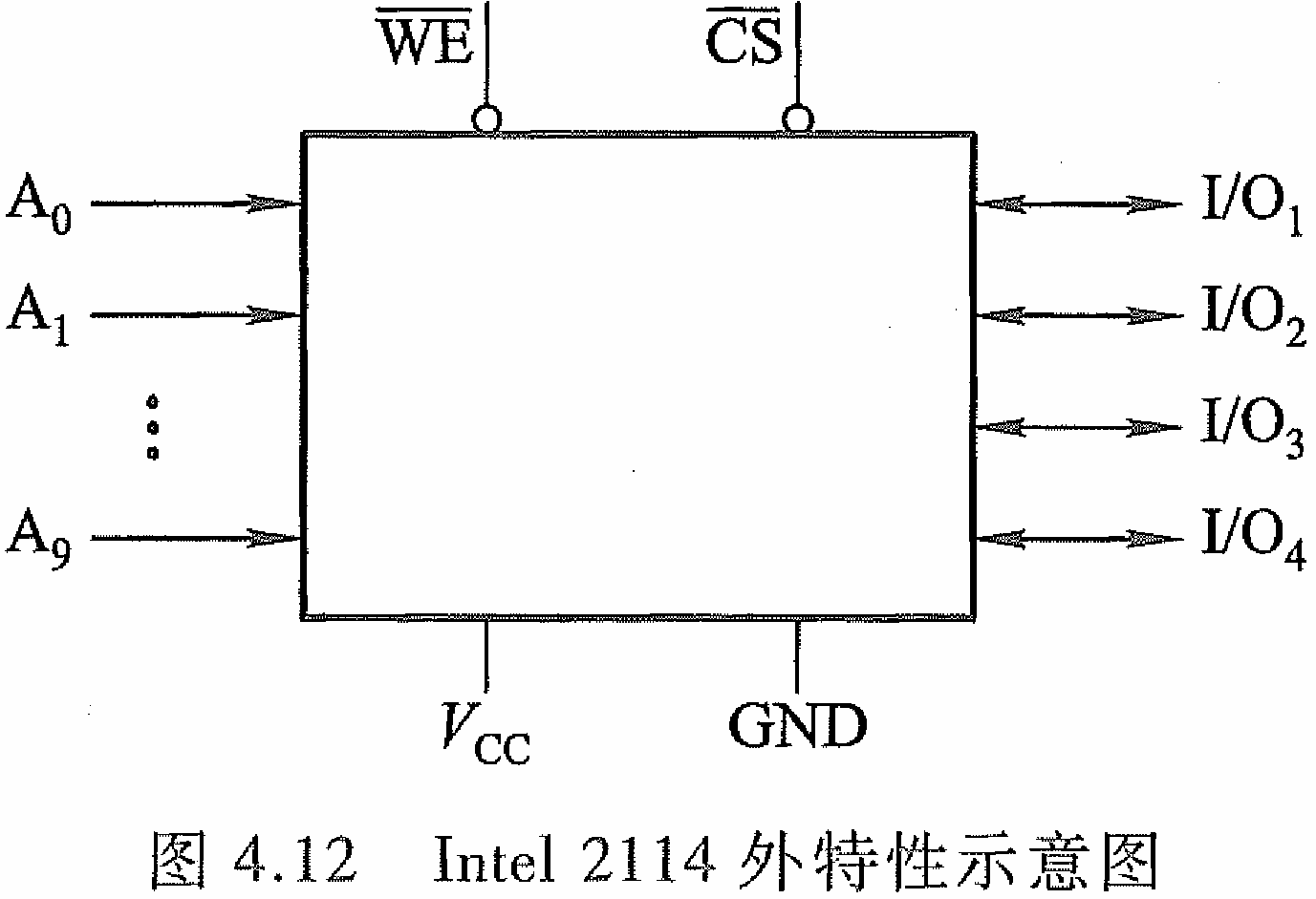
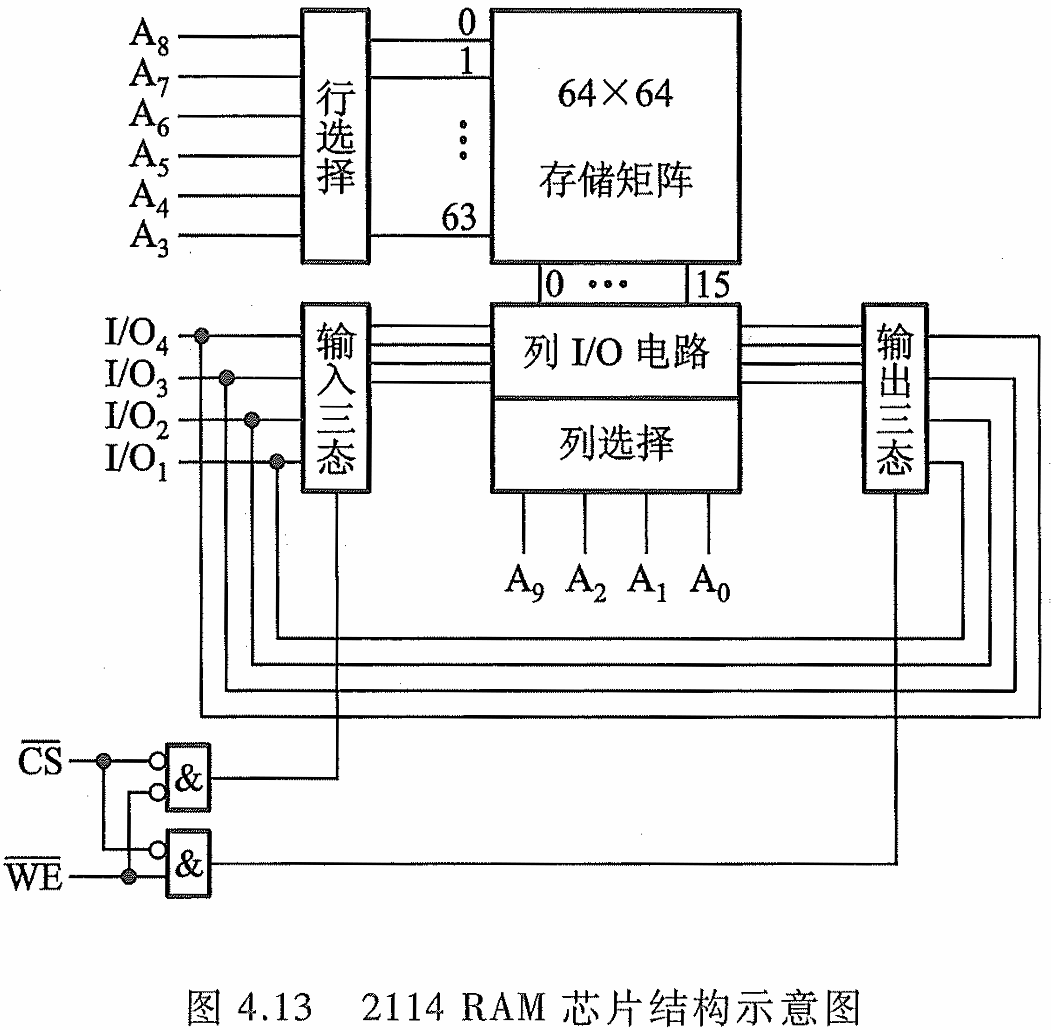
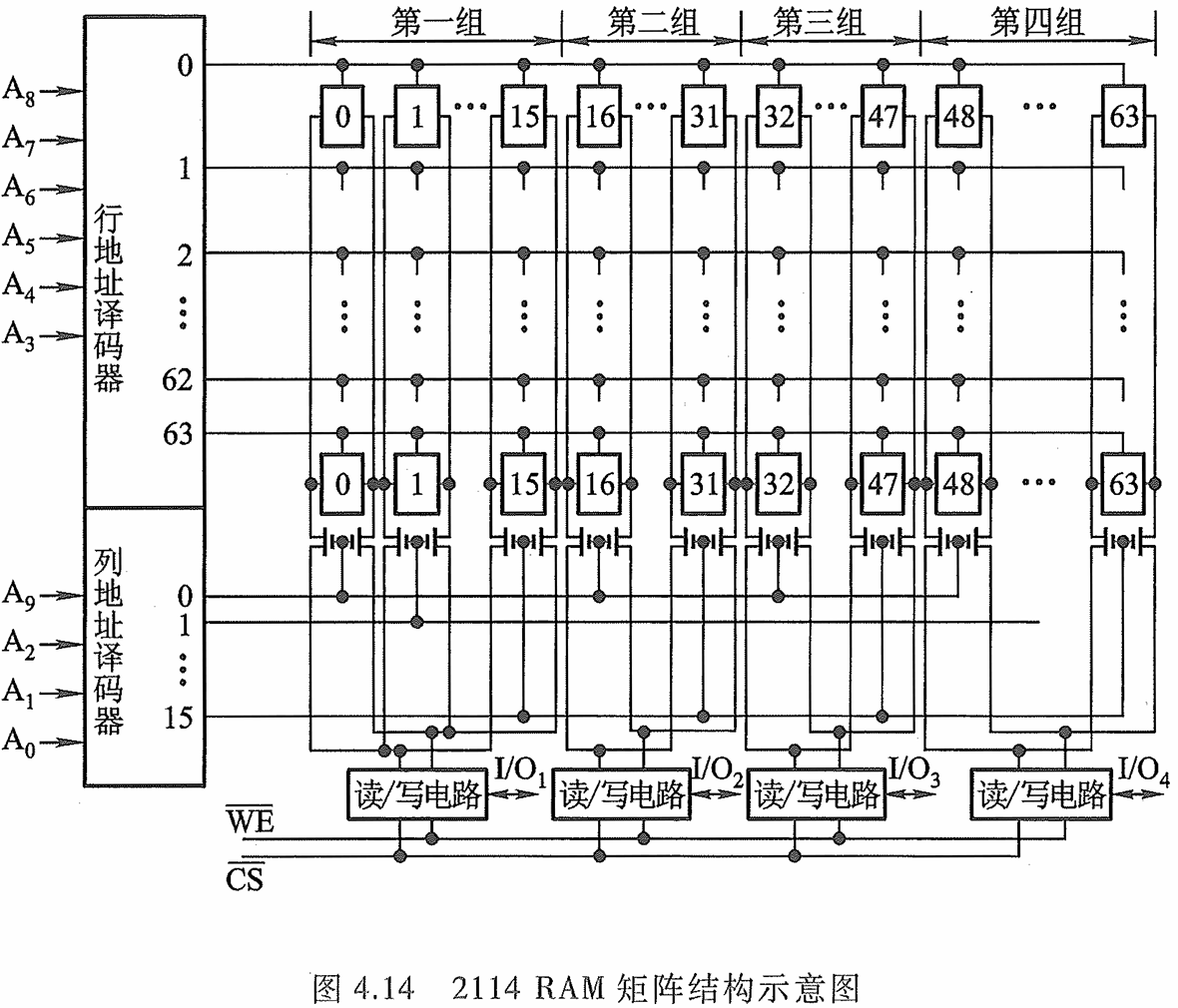
静态 RMA 芯片举例(Intel 2114)
当 C S ‾ \overline{\mathrm {CS}} CS 和 W E ‾ \overline{\mathrm {WE}} WE 均为低电平时,输入(写)三 态门打开, I / O 4 ∼ I / O 1 \mathrm{I/O}_{4}\sim\mathrm{I/O}_{1} I/O4∼I/O1上的数据即写入指定地址单元中。当 C S ‾ \overline{\mathrm {CS}} CS为低电平、 W E ‾ \overline{\mathrm {WE}} WE 为高电平时, 输出(读)三态门打开,列 I/0 电路的输出经片内总线输出至数据线 I / O 4 ∼ I / O 1 \mathrm{I/O}_{4}\sim\mathrm{I/O}_{1} I/O4∼I/O1 上。
- 存储矩阵结构:
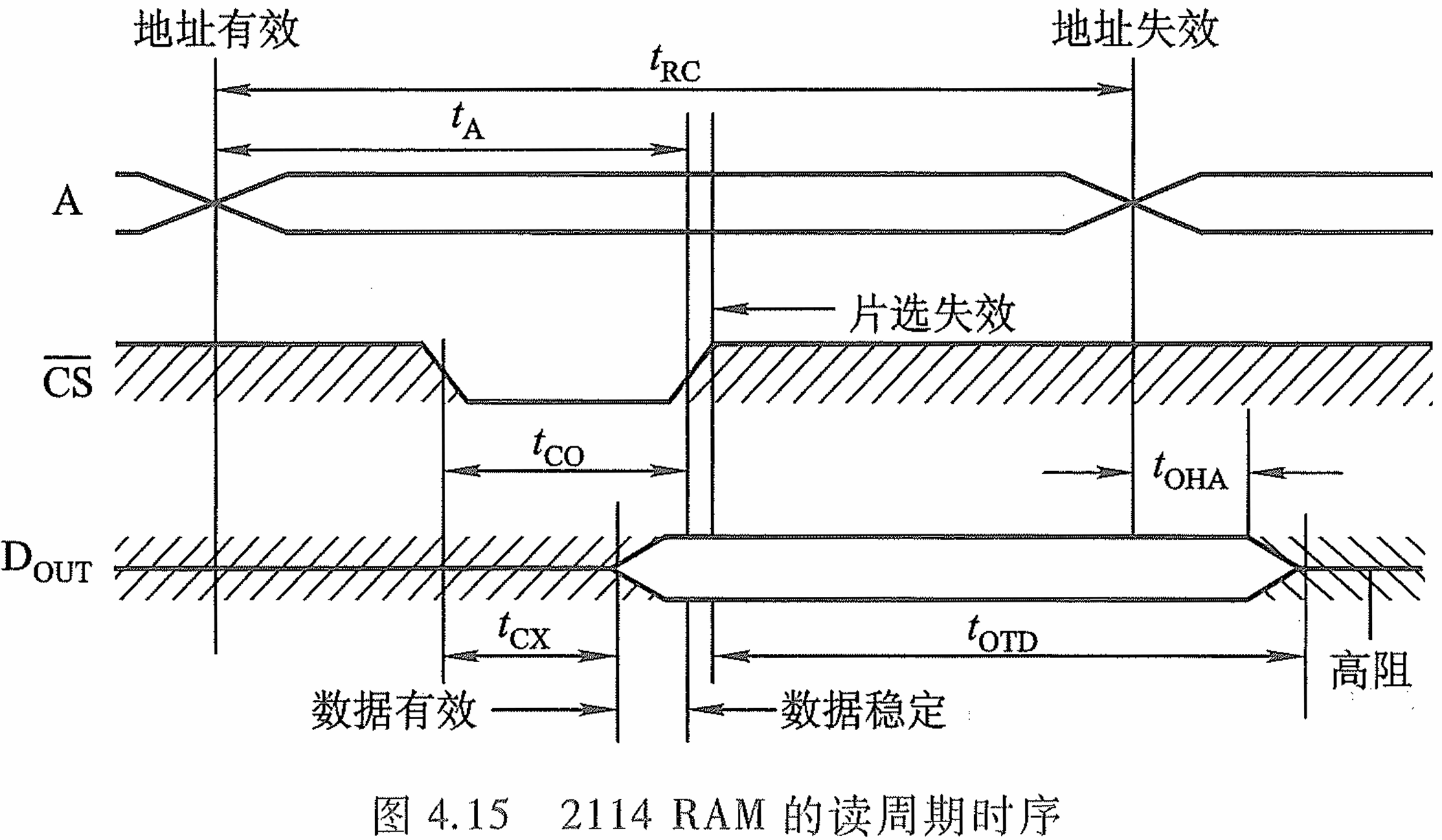
- 读周期时序:
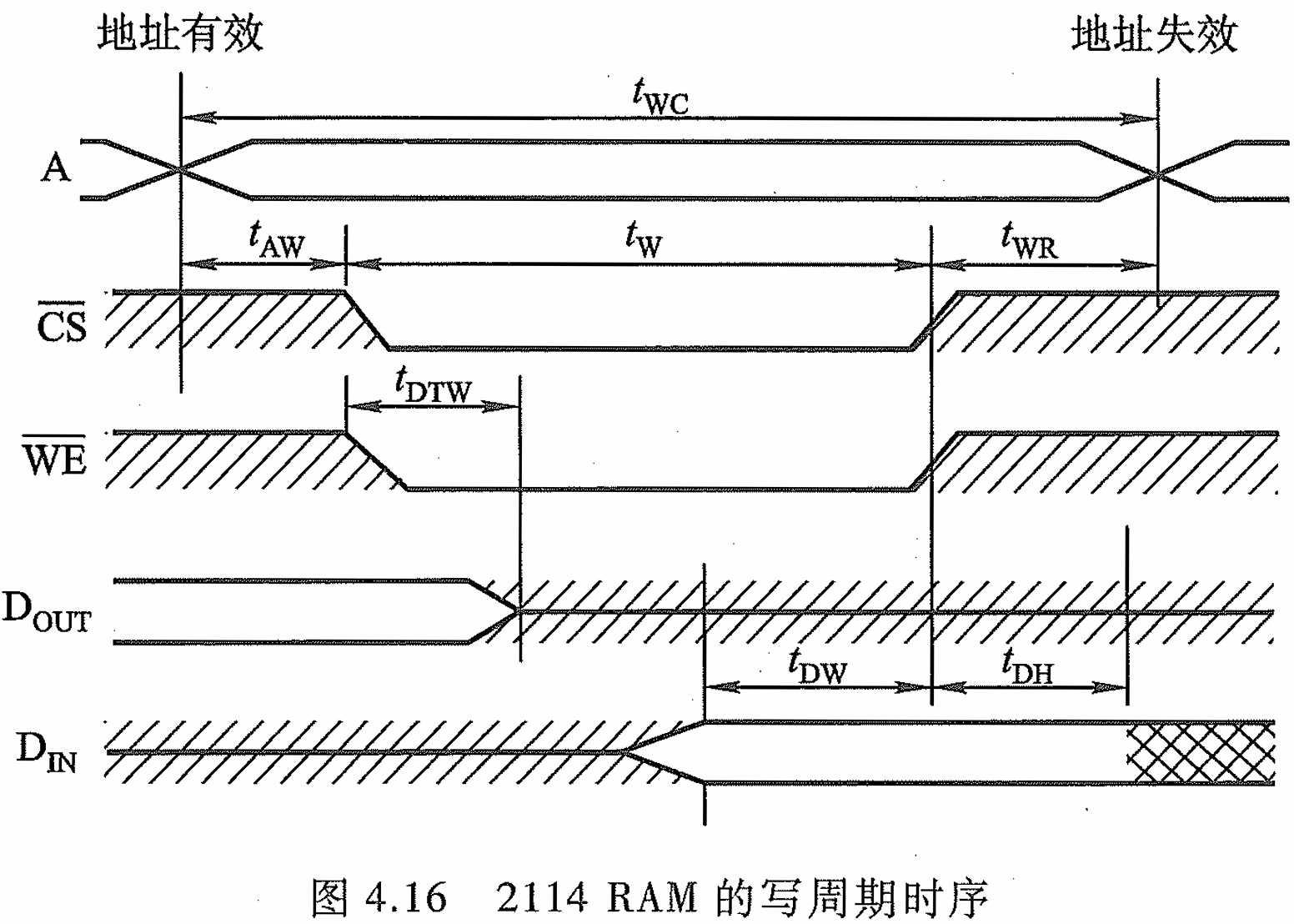
- 写周期时序
地址有效后,先发出写命令开始片选,片选完成了后,等待上一个读周期的数据滞后完成我们便开始写。由于写始终要知道内存单元的地址,所以地址失效一定在 D I N \mathrm {D_{IN}} DIN之后
-
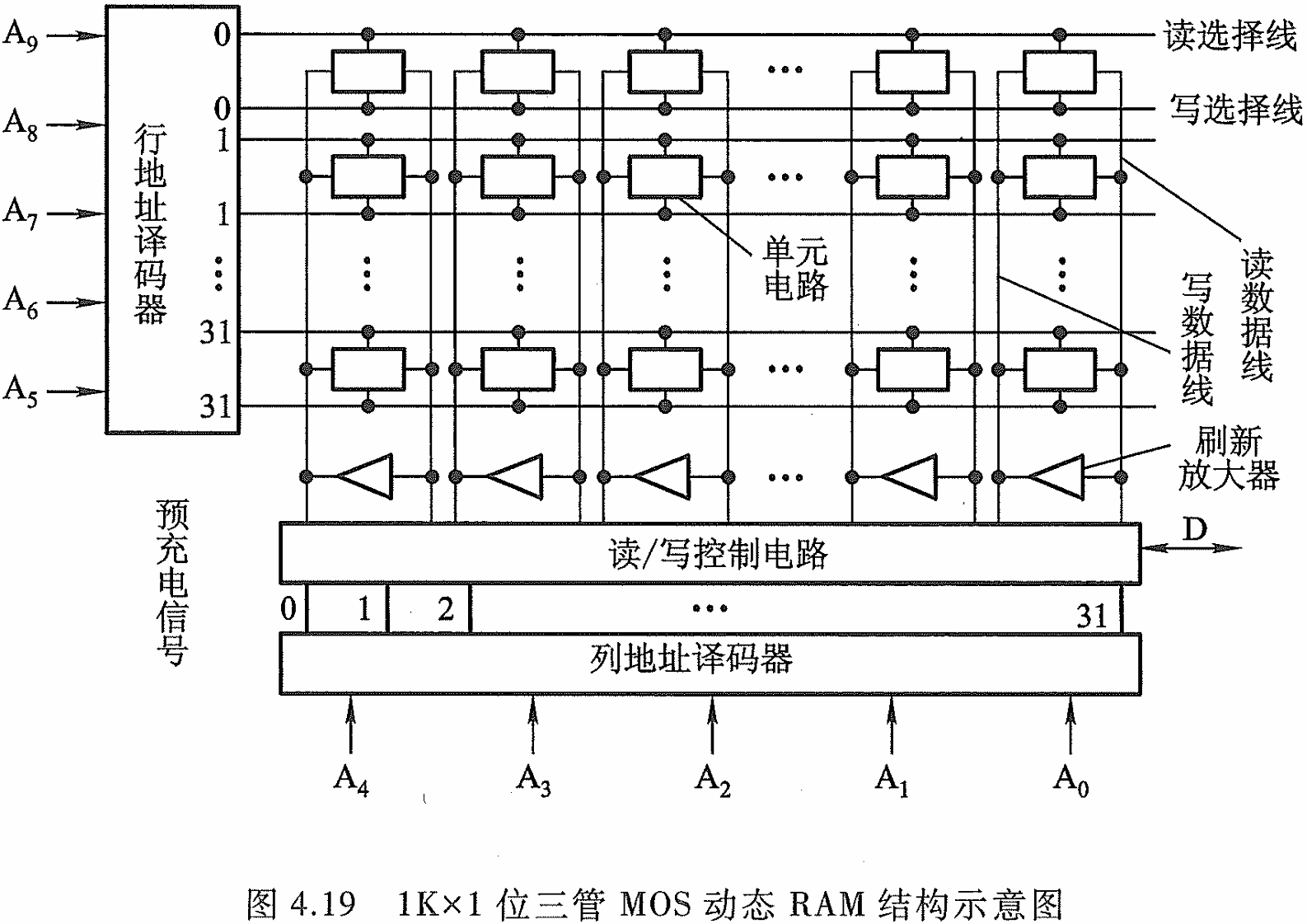
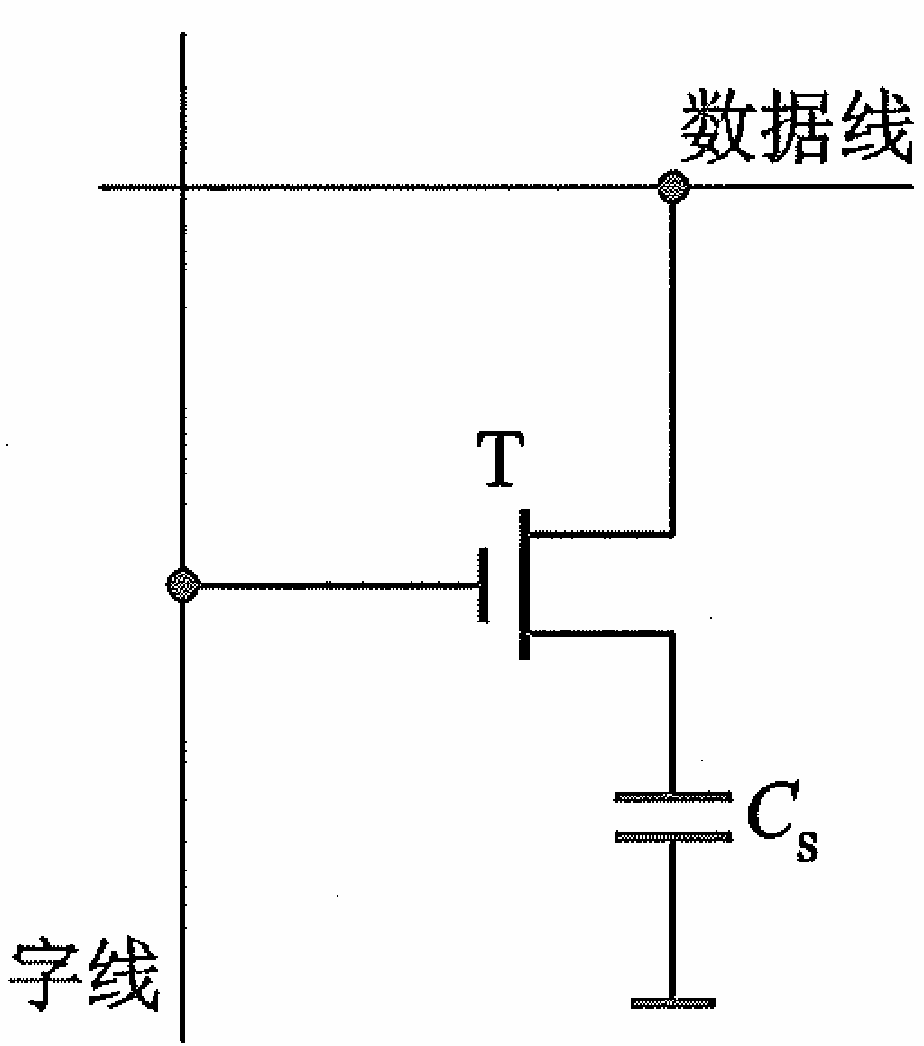
动态 RAM(Dynamic RAM, DRAM)
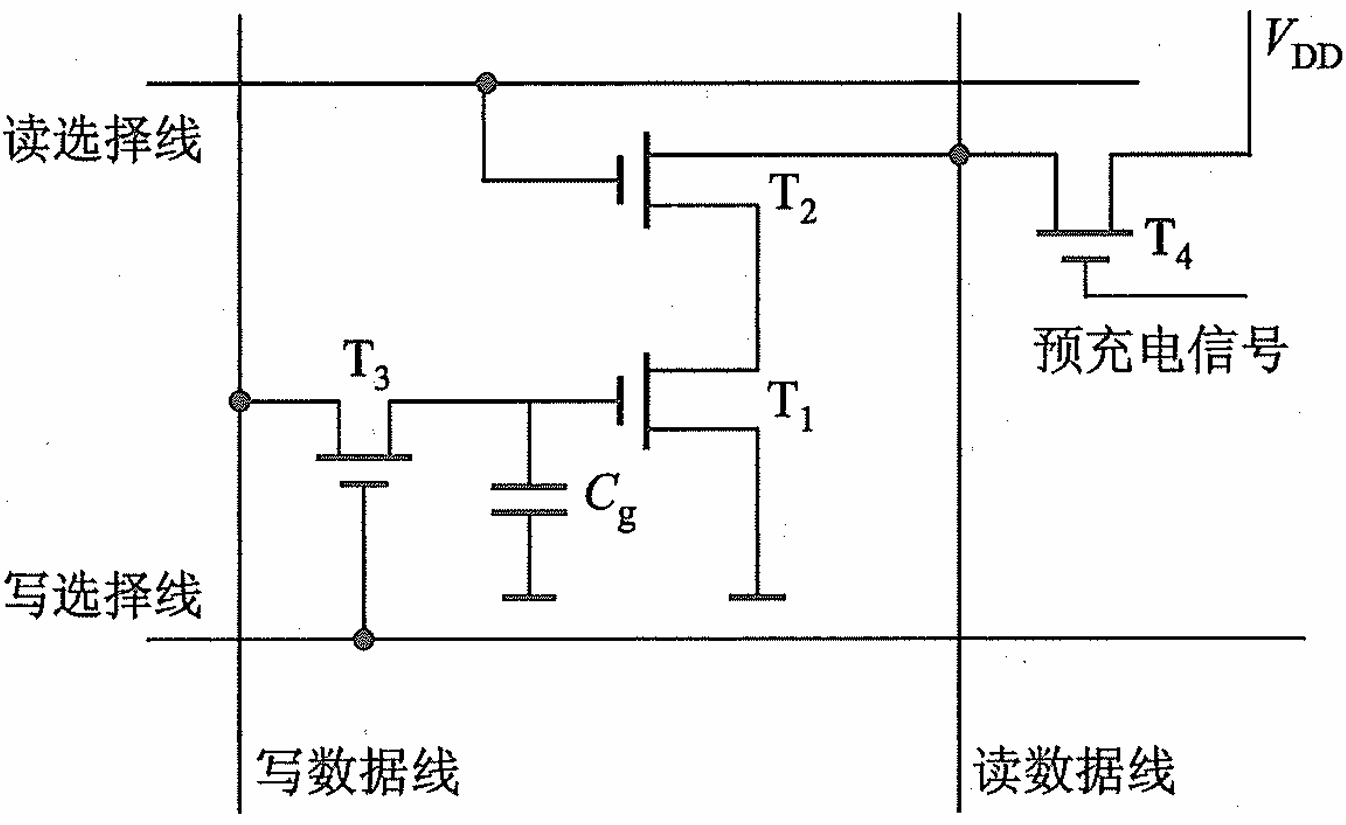
常见的动态RAM基本单元电路有三管式和单管式两种,它们的共同特点都是靠电容存储 电荷的原理来寄存信息,若电容上存有足够多的电荷表示存”1",电容上无电荷表示存“0”。
电 容上的电荷一般只能维持 1~ 2 ms,因此即使电源不掉电,信息也会自动消失;为此,必须在 2 ms内对其所有存储单元恢复一次原状态,这个过程称为再生或刷新。
由千它与静态 RAM 相 比,具有集成度更高、功耗更低等特点,目前被各类计算机广泛应用。
-
读操作:当
读选择线被选中时,晶体管T2导通,若存储在 C g \text{C}_\text{g} Cg上的电荷足够则T1导通,那么T1和T2接地,使读数据线降为低电平,读出0;若 C g \text{C}_\text{g} Cg的电荷不足以导通T1,则读数据线保持高电平不变。因此我可以发现读出的信息与原存入的信息是反相的,若要恢复真正的数据,需要将读出的数据进行取反。
-
写操作:在写操作期间,
写选择线被选中,晶体管T3导通,允许电流通过写数据线流向电容Cg。写入数据是正相的。
-
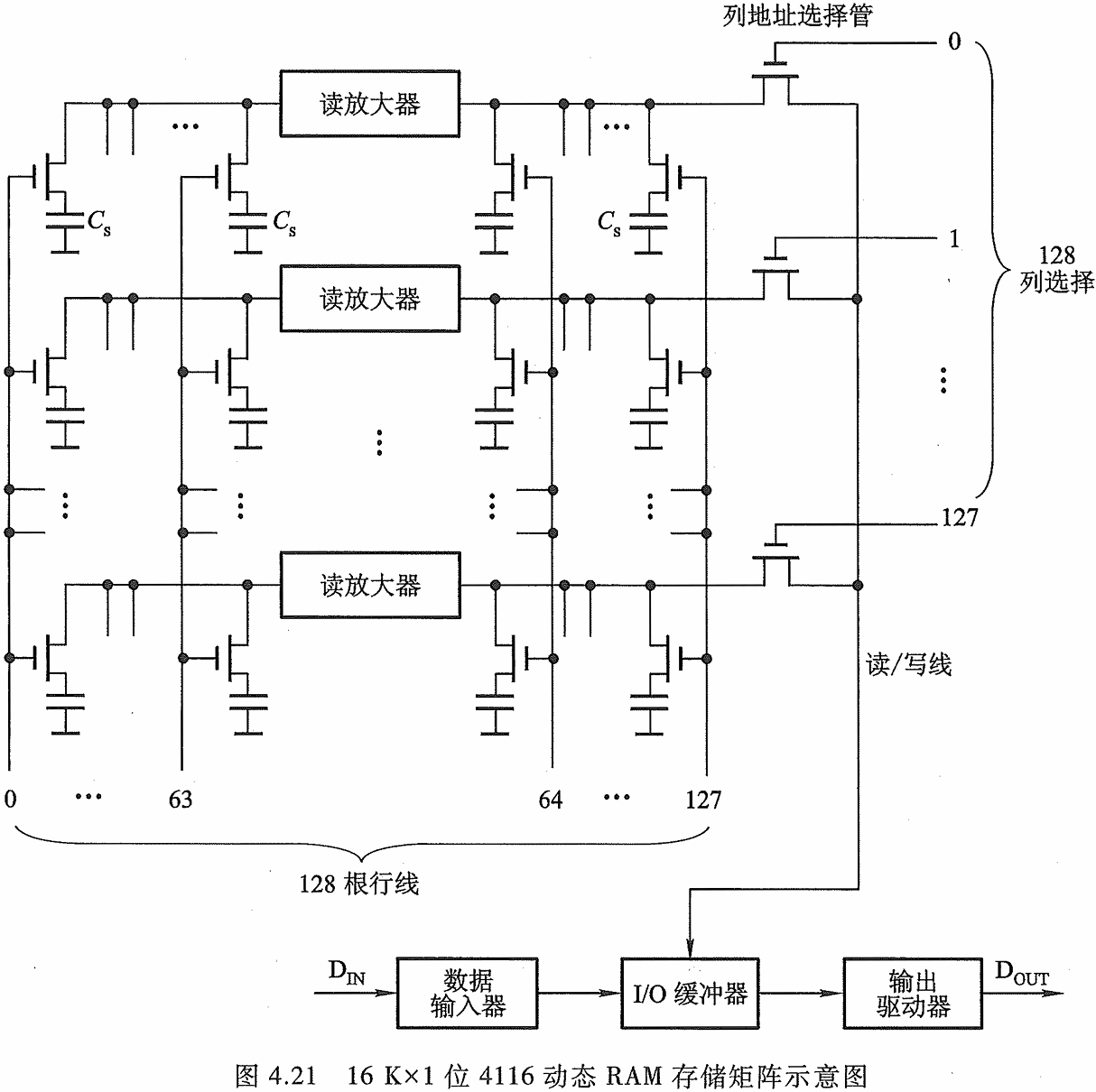
16 Kx 1 位 4116 动态 RAM 存储矩阵示意图
-
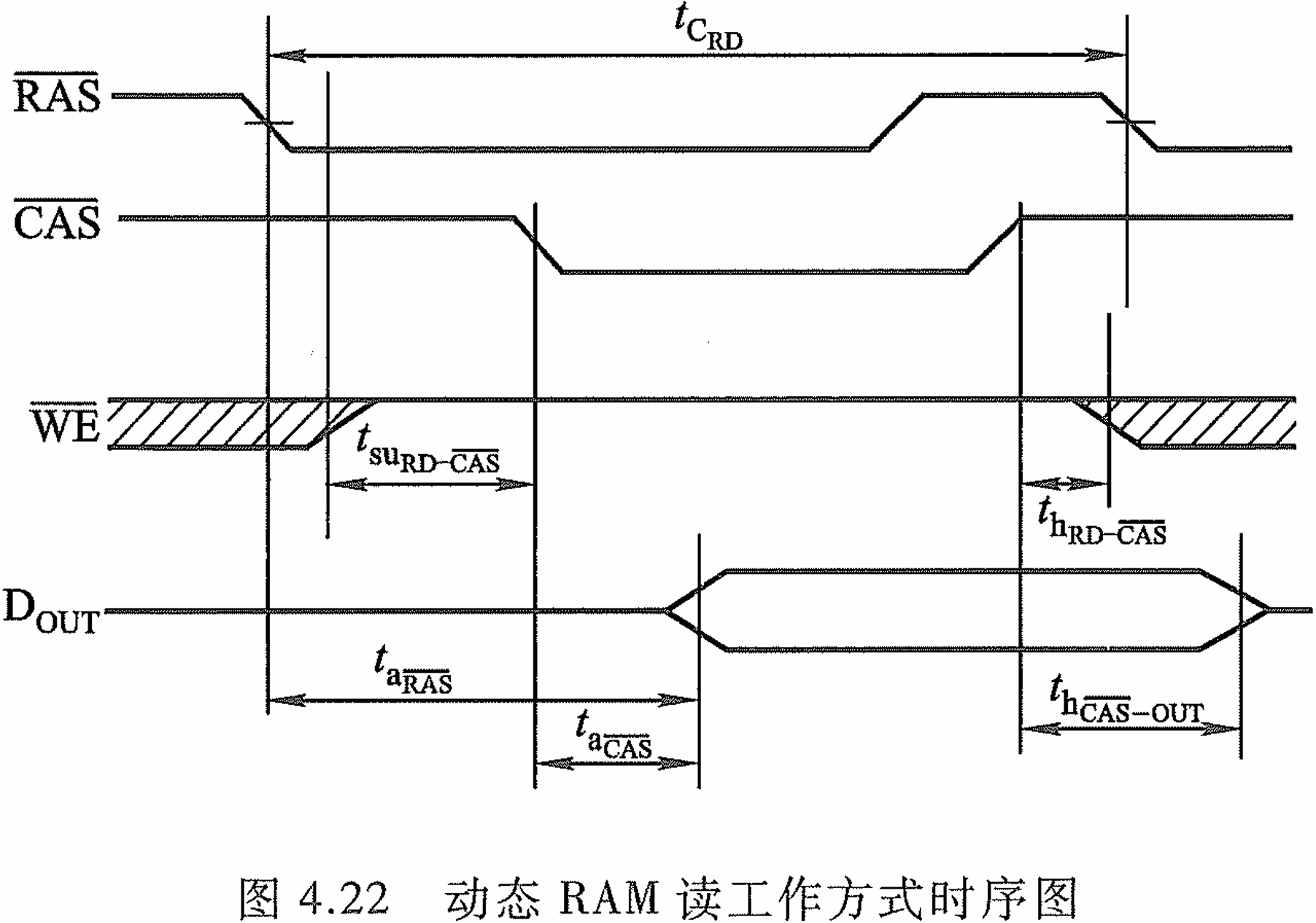
动态RAM读时序
先用 R A S ‾ \overline{\mathrm{RAS}} RAS将行地址送入行地址缓冲器,再由 C A S ‾ \overline{\mathrm{CAS}} CAS送入列地址缓冲器。地址确定才能读,因此 D O U T \mathrm{D}_\mathrm{OUT} DOUT有效在行列地址选通之后;读信号结束后,数据还存在一定时间在线路上的传输,因此 D O U T \mathrm{D}_\mathrm{OUT} DOUT必须滞后。
-
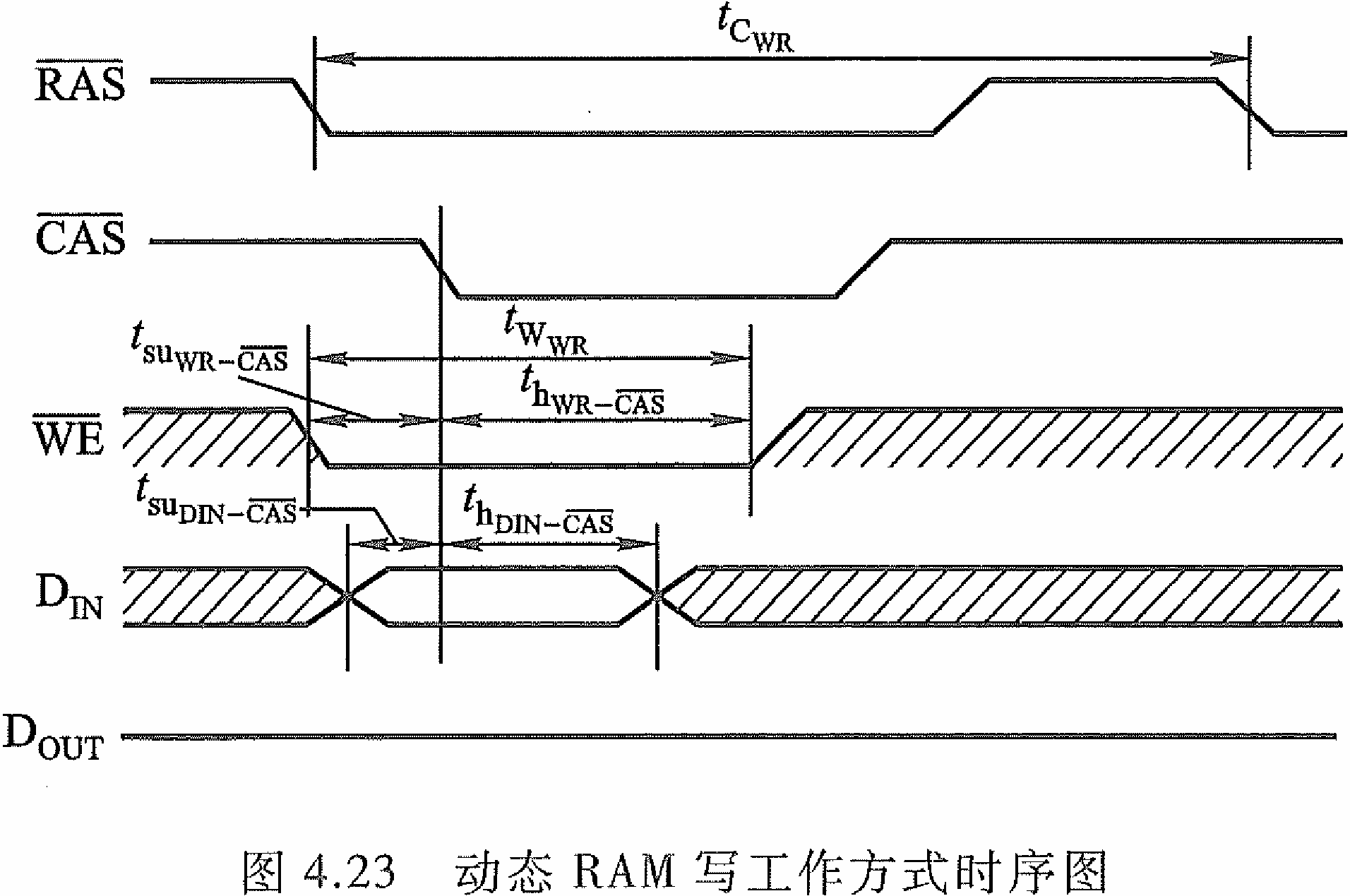
动态RAM写时序
同样的,先用 R A S ‾ \overline{\mathrm{RAS}} RAS将行地址送入行地址缓冲器,再由 C A S ‾ \overline{\mathrm{CAS}} CAS送入列地址缓冲器。但是在 W E ‾ \overline{\mathrm{WE}} WE低电平写信号生效后,就要开始准备数据了,因此即使 C A S ‾ \overline{\mathrm{CAS}} CAS还没有有效, D I N \mathrm{D_IN} DIN也得开始了。
等到 C A S ‾ \overline{\mathrm{CAS}} CAS有效了,那么 D I N \mathrm{D_IN} DIN也稳定了。
-
-
动态 RAM 的刷新
刷新的过程实质上是先将原存信息读出,再由刷新放大器形成原信息并重新写入的再生过程。由于存储单元被访问是随机的,有可能某些存储单元长期得不到访问,不进行存储器的 读/写操作,其存储单元内的原信息将会慢慢消失。
为此,必须采用定时刷新的方法,它规定在一 定的时间内,对动态 RAM 的全部基本单元电路必作一次刷新,一般取2 ms,这个时间称为刷新周期,又称再生周期。
刷新是一行行进行的,必须在刷新周期内,由专用的刷新电路来完成对基 本单元电路的逐行刷新,才能保证动态 RAM 内的信息不丢失。通常有三种方式刷新:集中刷新、分散刷新和异步刷新。
-
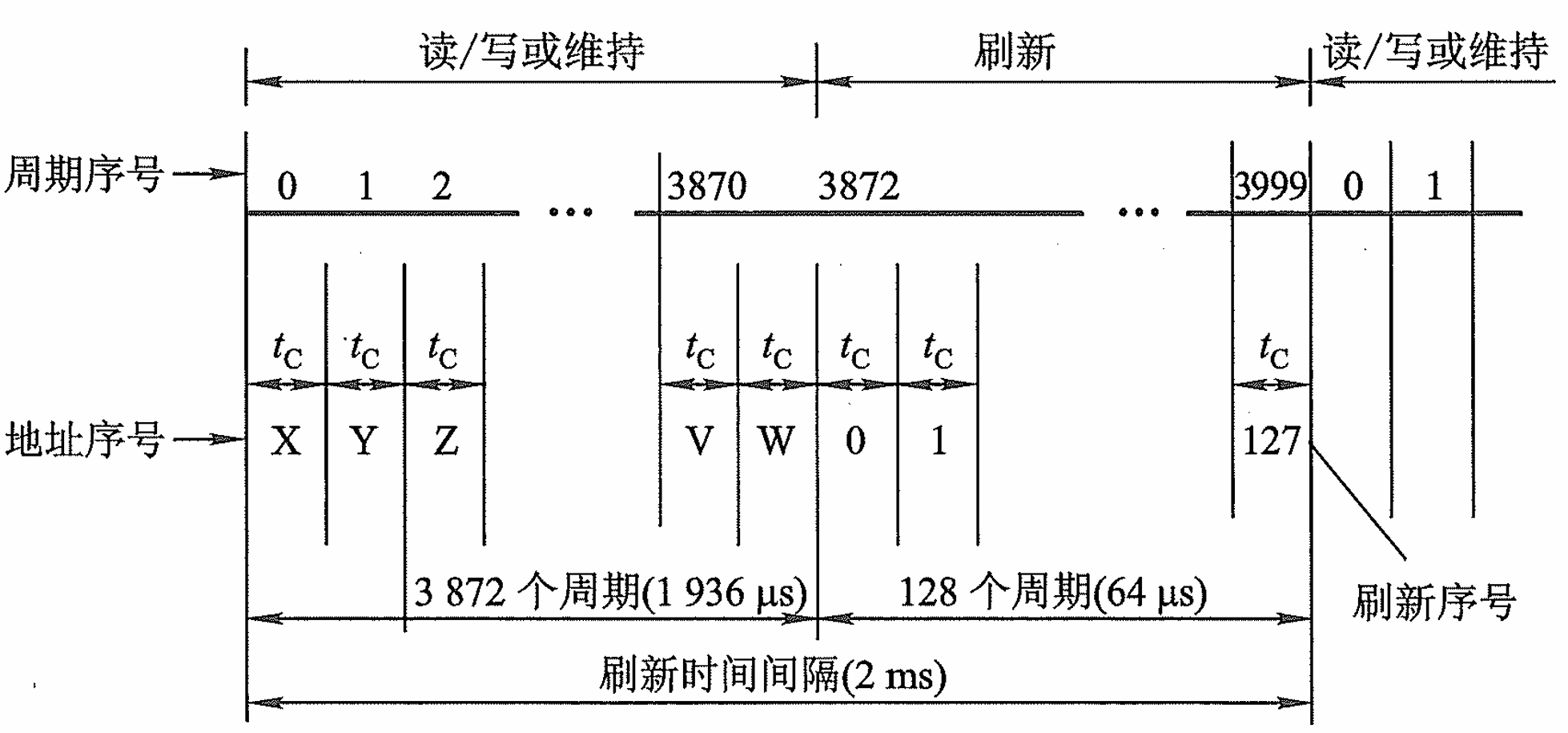
集中刷新:集中刷新是在规定的一个刷新周期内,对全部存储单元集中一段时间逐行进行刷新,此刻必 须停止读/写操作。
例如,对 128x128 矩阵的存储芯片进行刷新时,若存取周期为 0.5 µs,刷新周 期为2 ms(占 4 000 个存取周期),则对 128 行集中刷新共需 64 µs(占 128 个存取周期),其余的 1 936 µ,s (共 3 872 个存取周期)用来读/写或维持信息,如下图所示。由于在这 64 µs 时间内不能进行读/写操作,故称为“死时间”,又称访存“死区”,所占比率为 128/4000x 100% = 3.2%, 称为死时间率
?刷新一行占一个存储周期
-
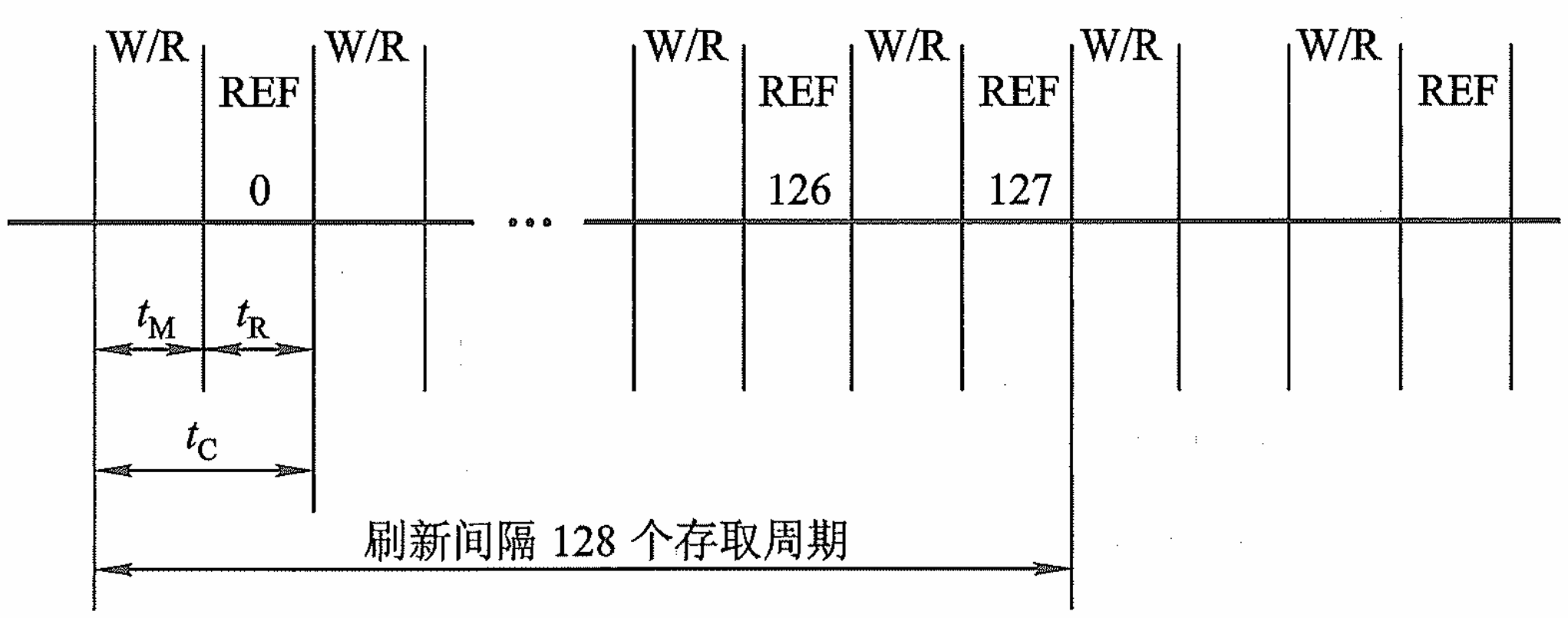
分散刷新:分散刷新是指对每行存储单元的刷新分散到每个存取周期内完成。
该模式中,所有的行刷新被分配到了各存取周期,即完成一次读/写就做一行的刷新;存取周期由0.5µs扩充到了1µs,这是因为前0.5µs用来进行读/写;后0.5µs用来刷新;这样做的好处是不存在读写停止读写的死区时间了,坏处是存储周期变长了,降低系统效率。
-
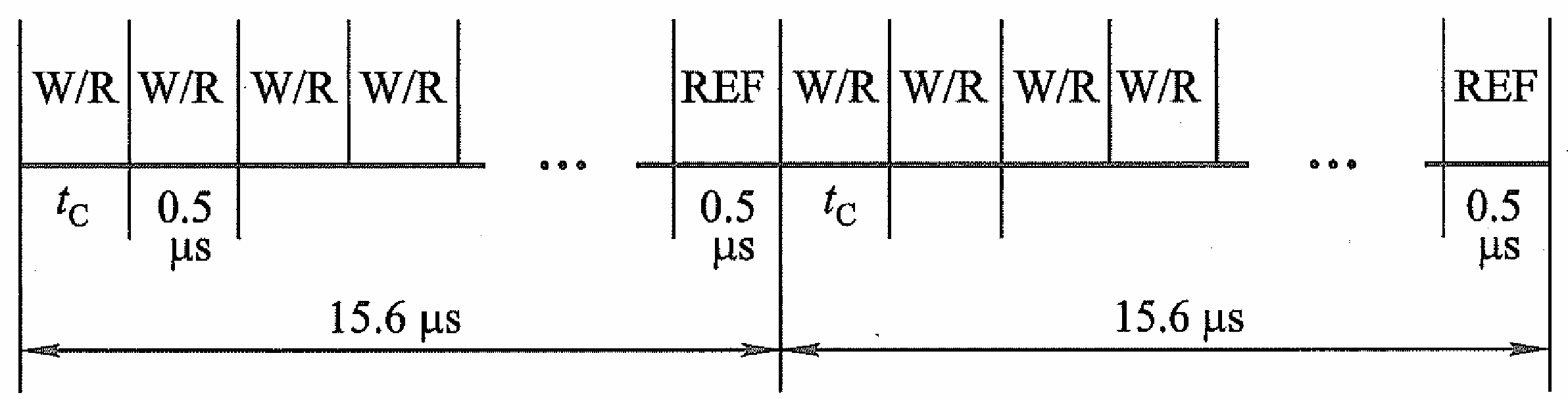
异步刷新
结合分散刷新与集中刷新,每隔若干秒刷新一行。此般,经过一个刷新周期后所有行都得到了刷,即克服了集中刷新的长时死区效应又解决了
-
-
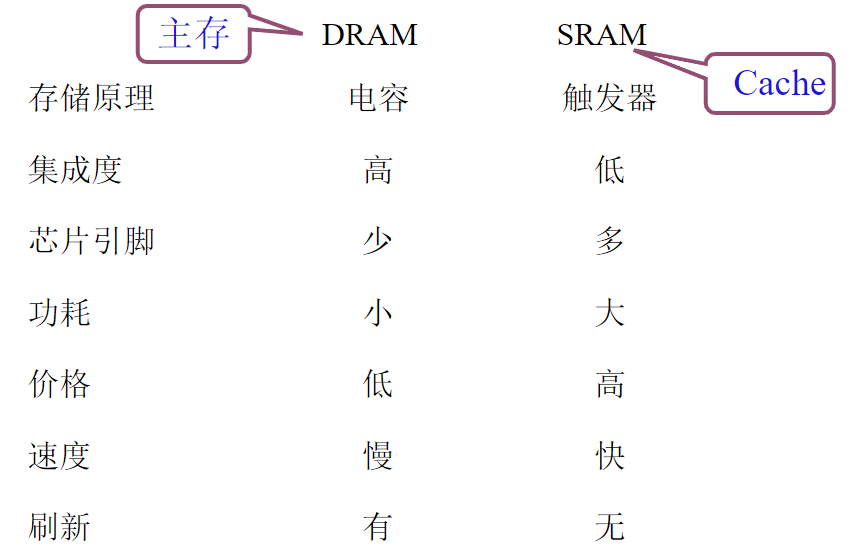
动态 RAM 和静态 RAM 的比较
4.2.4 只读存储器(ROM)
半导体ROM基本器件为两种:MOS 型和 TTL 型。
-
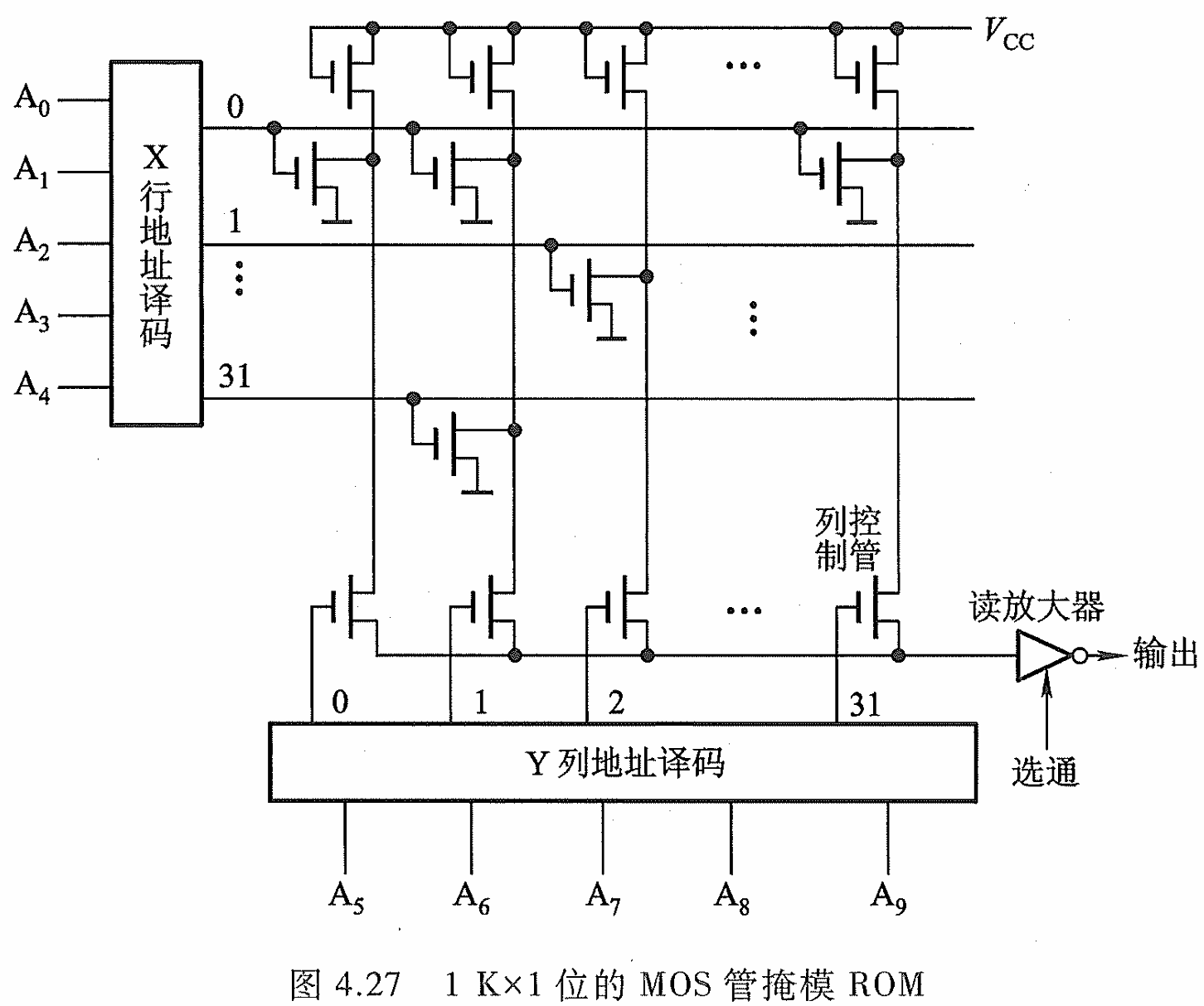
掩模 ROM
- 有耦合元件 MOS 管的节点,若导通将使列线输出为低电平
- 列线的输出经过放大器将反相
-
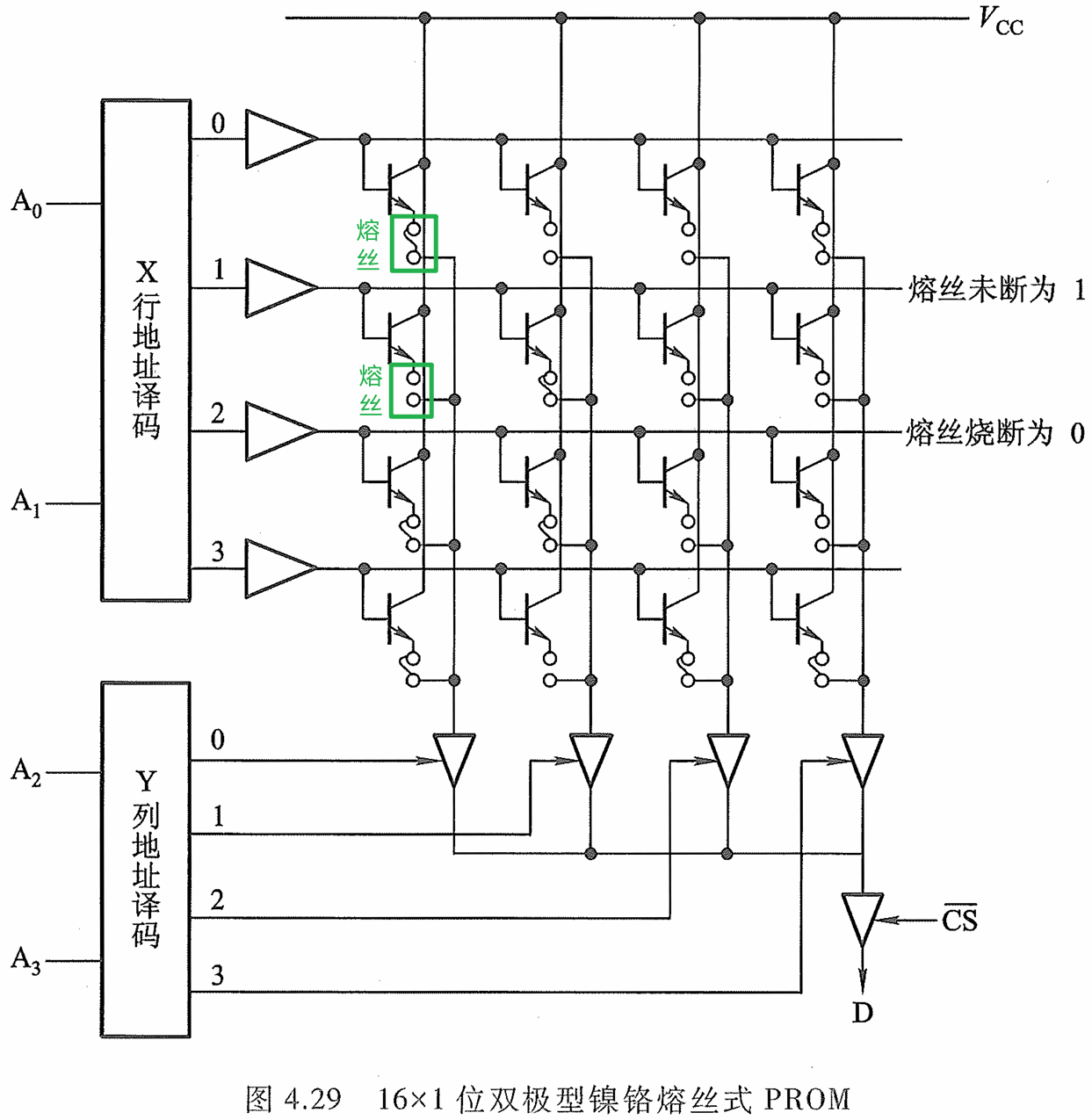
PROM
- 熔丝未断和断可区别其所存信息是 " 1” 或“0” 。
- 已断的熔丝是无 法再恢复的,故这种 ROM往往只能实现一次编程,不得再修改。
-
EPROM
-
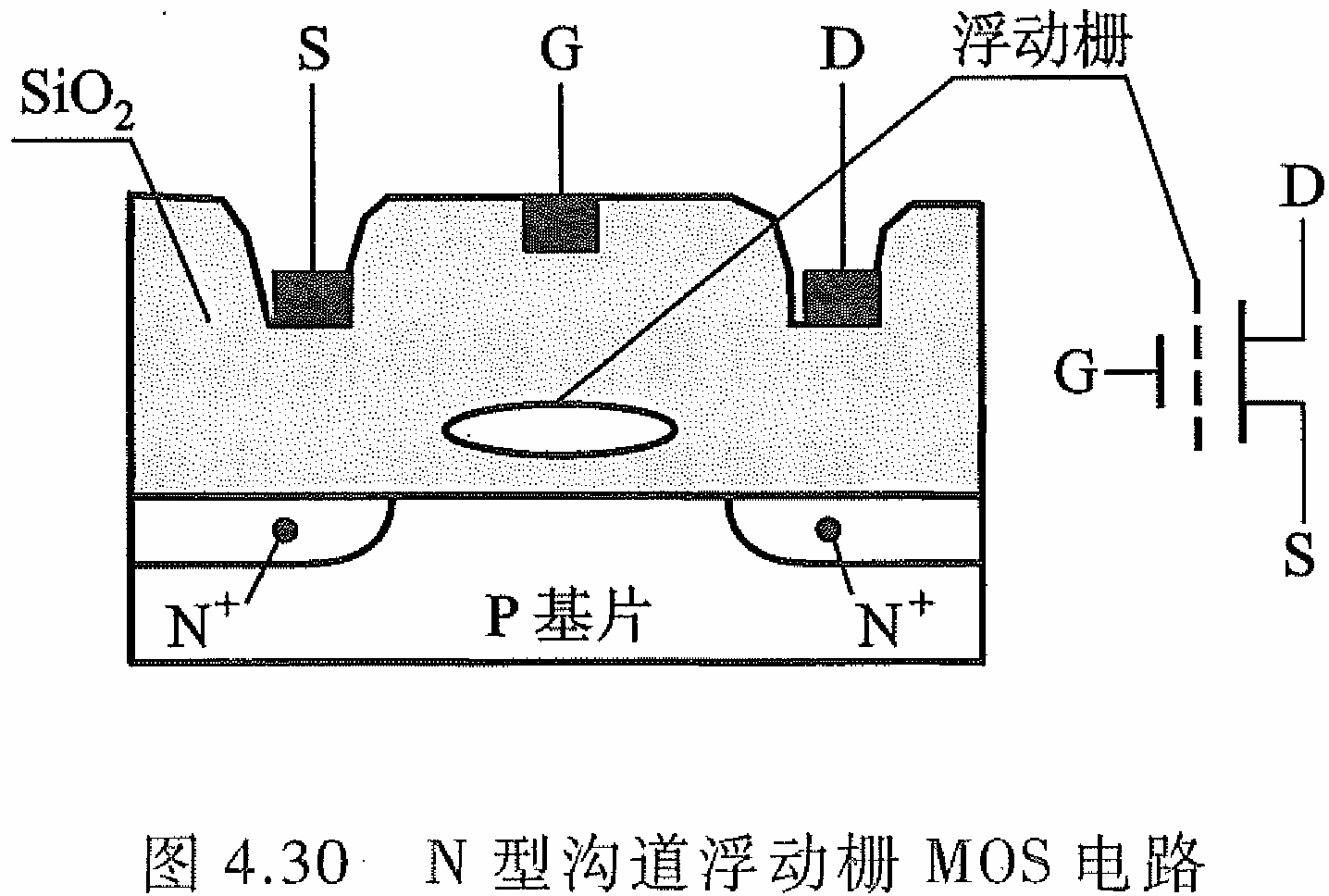
N 型沟道浮动栅 MOS 电路
在漏端 D 加上正电压会形成一个浮动栅,源 S 与漏 D 之间不导通,MOS管处于“0”状态。D 端不加正电压,则不能形成浮动栅,MOS管正常导通,呈“1”状态。
用户需重 新改变其状态,可用紫外线照射,驱散浮动栅
-
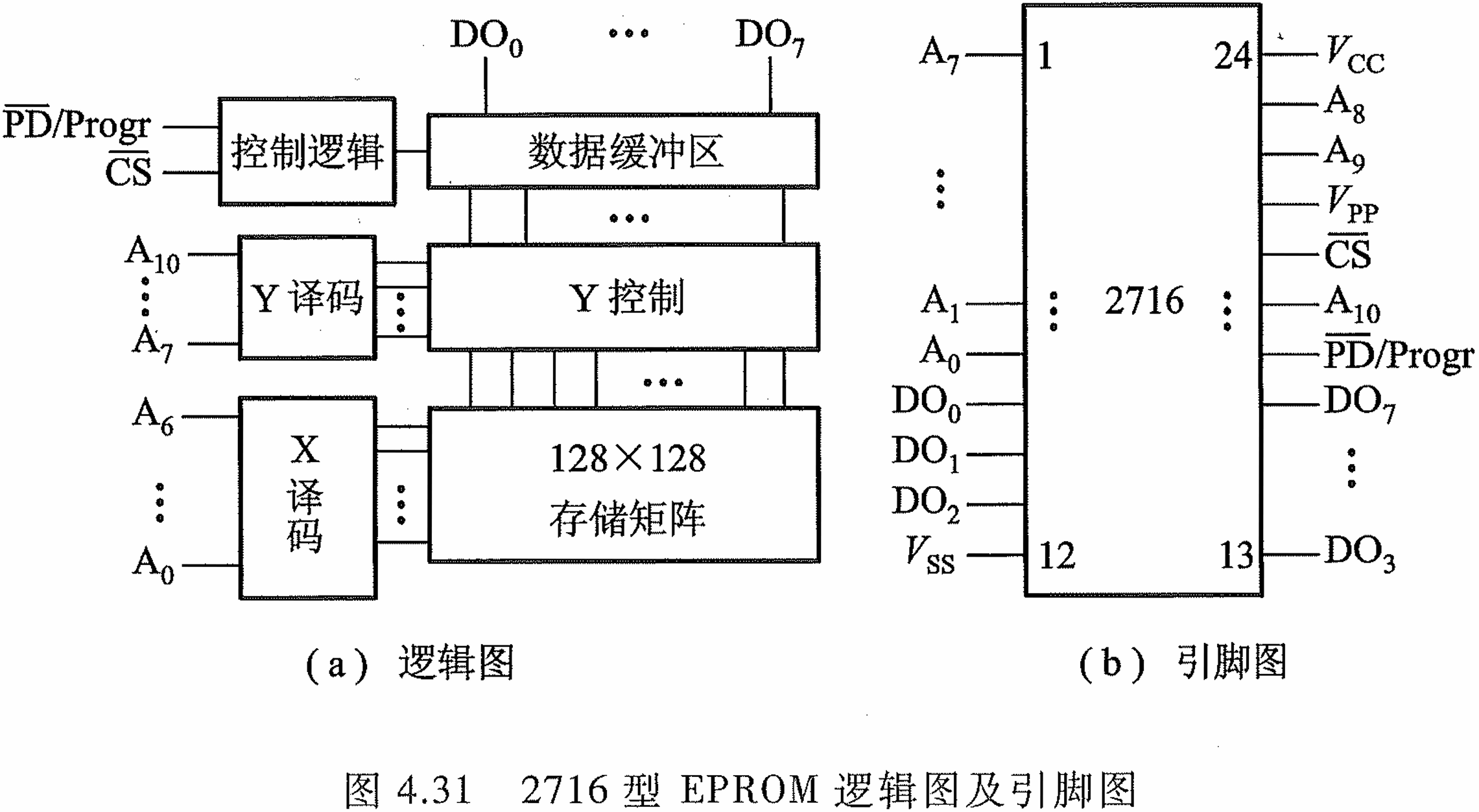
2716 型 EPROM 逻辑图及引脚图
- V s s V_{ss} Vss为地, V c c V_{cc} Vcc进而 V p p V_{pp} Vpp为两个电源头; C S ‾ \overline{\mathrm{CS}} CS为片选端,读出时为低电平,编程写入时为高电平。 P D ‾ / P r o g r \overline{\mathrm{PD}}/\mathrm{Progr} PD/Progr为功率下降/编程输入端,在读出时为低电平。
- EPROM 的改写可用两种方法:一种用紫外线照射(该方法不能对个别单元进行单独擦除或重写),另一种方法用电气方法将存储内容擦除,再重写。
-
4.2.5 存储器容量的扩展
4.2.6 存储器与CPU的连接
-
存储器与 CPU 的连接步骤:
-
存储器于CPU连接实例1
-
问题描述
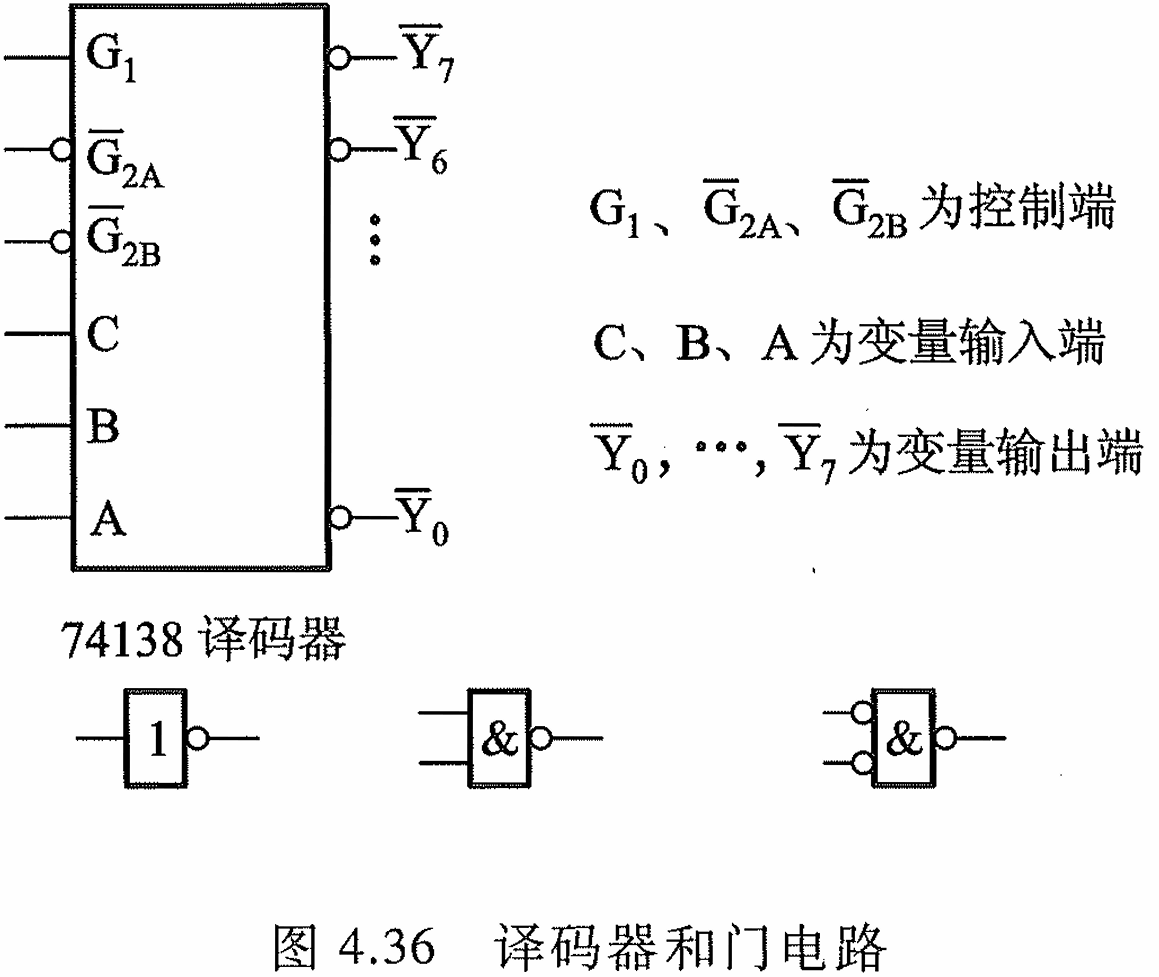
例 4.1 设 CPU 有 16 根地址线、8 根数据 线,并用 M R E Q ‾ \overline{\mathrm{MREQ}} MREQ 作为访存控制信号(低电平有 效),用 W R ‾ \overline{\mathrm{WR}} WR作为读/写控制信号(高电平为读,低 电平为写)。现有下列存储芯片:1 Kx4 位 RAM、 4 Kx8 位 RAM、8 Kx8 位 RAM、2 Kx8 位 ROM、 4 Kx8 位 ROM、8 Kx 8 位 ROM 及 74138 译码器 和各种门电路,如图 4.36 所示。画出 CPU 与存 储器的连接图,要求如下:
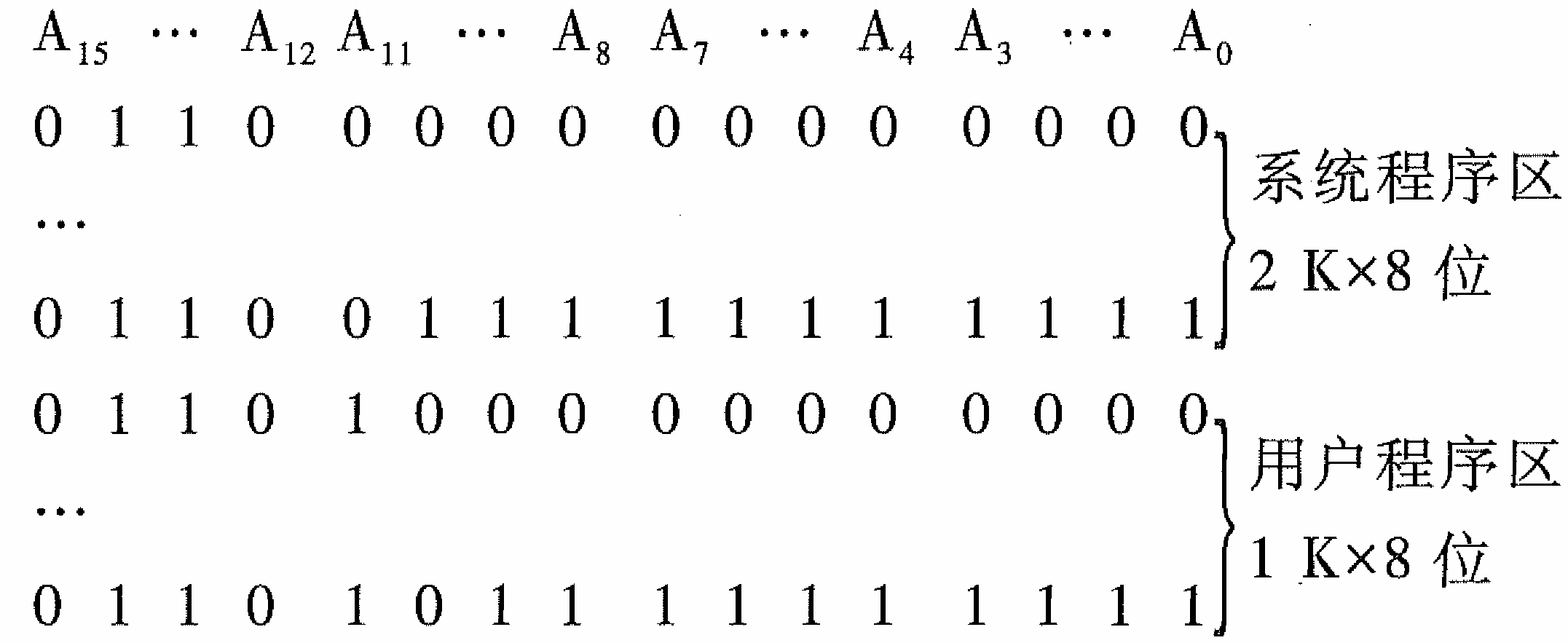
- 主存地址空间分配: 6000H ~ 67FFH 为系统程序区。;6800H ~ 6BFFH 为用户程序区。
- 合理选用上述存储芯片,说明各选几片。
- 详细画出存储芯片的片选逻辑图。
-
问题解答
-
写出对应的二进制地址码
-
确定芯片的数量及类型
根据6000H~ 67FFH 为系统程序区的范围,应选择 1 片 2 Kx8 位的 ROM
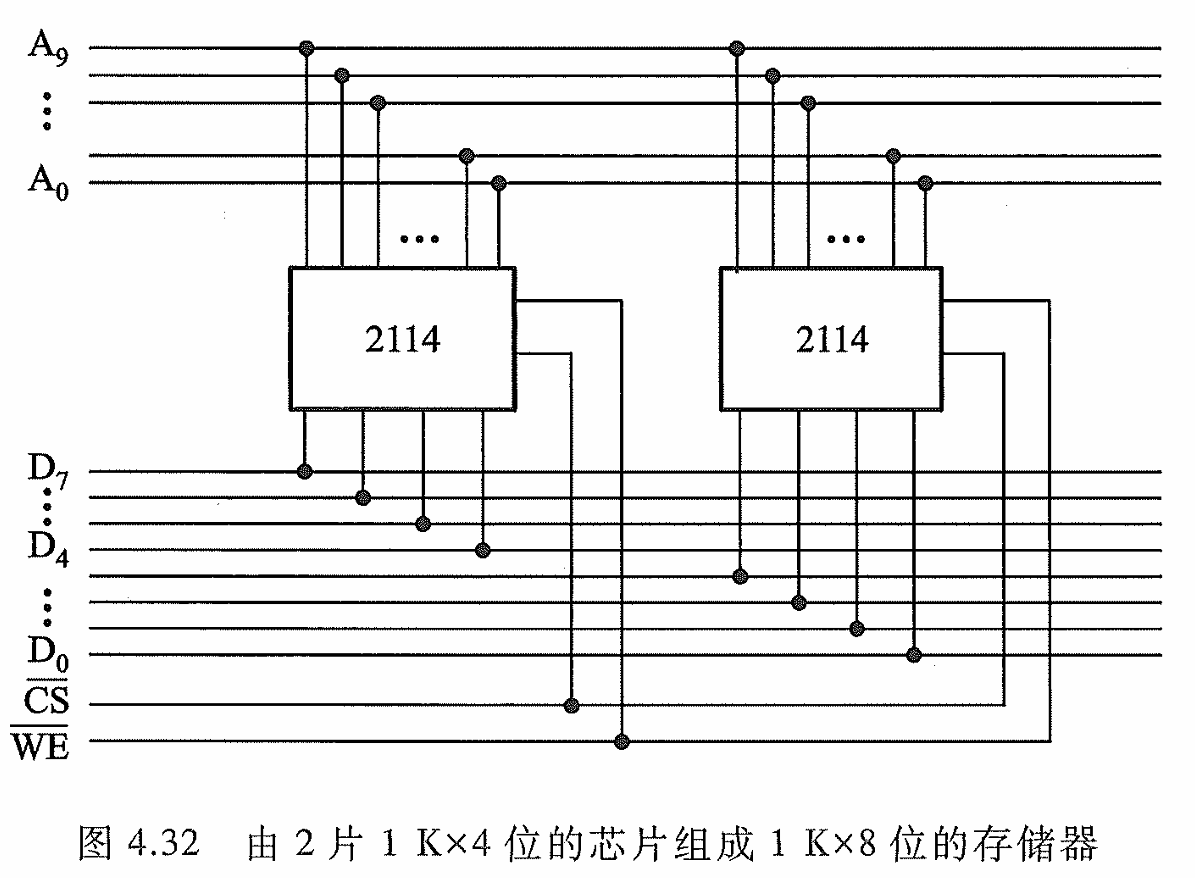
根据6800H~ 6BFFH 为用户程序区的范围,选 2 片 1 Kx4 位的 RAM 芯片正好满足 1 Kx8 位 的用户程序区要求。
-
分配地址线
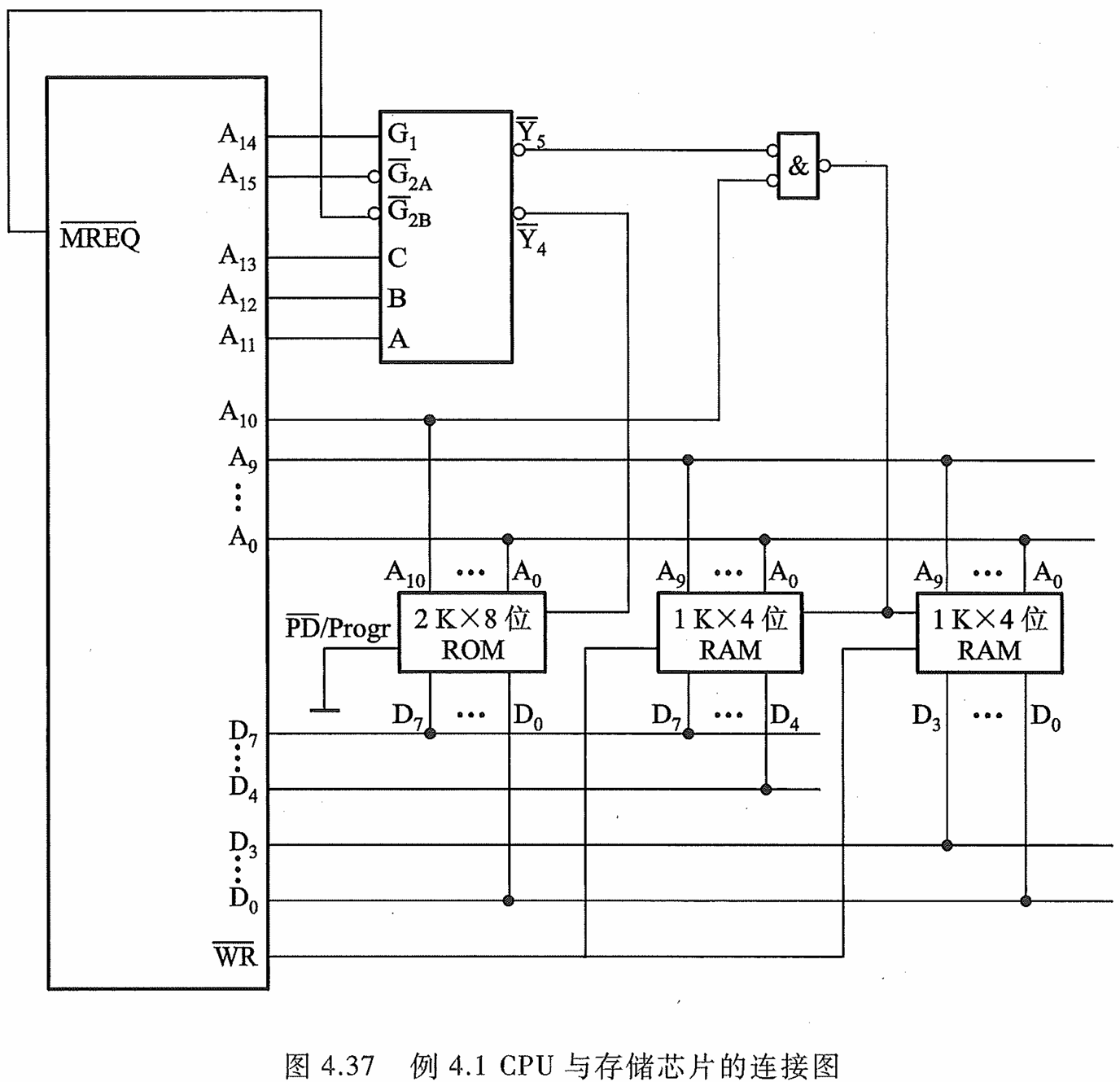
将 CPU 的低 11 位地址 A 10 ∼ A 0 \mathrm {A_{10}}\sim \mathrm{A_0} A10∼A0。与 2 Kx 8 位的 ROM 地址线相连;将 CPU 的低 10 位地址 A 9 ∼ A 0 \mathrm {A_{9}}\sim \mathrm{A_0} A9∼A0。与 2 片 1 Kx4 位的 RAM 地址线相连。
-
确定片选信号和片选逻辑以及接线
由74138 译码器输入逻辑关系可知,必须保证控制端 G 1 \mathrm G_1 G1为高电平, G ‾ 2 A \mathrm{\overline{G}_{2A}} G2A与 G ‾ 2 B \mathrm{\overline{G}_{2B}} G2B为低电平,才能使译码器正常工作。
根据第一步写出的存储器地址范围得出, A 15 \mathrm {A_{15}} A15始终为低电平,, A 14 \mathrm {A_{14}} A14始终为高电平,它们正好可分别与译码器的 G ‾ 2 A \mathrm{\overline{G}_{2A}} G2A(低)和 G 1 \mathrm G_1 G1(高)对应。
而访存控制信号 M R E Q ‾ \overline{\mathrm{MREQ}} MREQ (低电平有效)又正好可与 G ‾ 2 B \mathrm{\overline{G}_{2B}} G2B(低)对应。剩下的 A 13 、 A 12 、 A 11 \mathrm{A}_{13}\mathrm{~、A}_{12}\mathrm{~、A}_{11} A13 、A12 、A11可分别接到译码器的 C、B、A 输入 端。
其输出 Y 4 ‾ {\overline{\mathrm{Y_4}}} Y4 有效时,选中 1 片 ROM; Y 5 ‾ {\overline{\mathrm{Y_5}}} Y5 与 A 10 {\mathrm{A_{10}}} A10 同时有效均为低电平时,与门输出选中 2 片 RAM,如图 4.37 所示。
图中 ROM 芯片的 P D / P r o g {\mathrm{PD/Prog}} PD/Prog 端接地,以确保在读出时低电平有效。RAM 芯片的读写控制端与 CPU 的读写命令端 W R ‾ {\overline{\mathrm{WR}}} WR 相连。
ROM 的 8 根数据线直接与 CPU 的 8 根数据线相连,2 片 RAM 的数据线分别与 CPU 数据总线的高 4 位和低 4 位相连。
-
画图
-
-
4.2.7 存储器的校验(汉明码)
汉明码是由 Richard Hanming 于 1950 年提出的,它具有一位纠错能力。
新增的汉明码校验位数应满足如下关系: 2 k ⩾ n + k + 1 2^{k}\geqslant n+k+1 2k⩾n+k+1,其中k为校验位位数,n位数据位数。
同时,我要强调的是汉明校验码的生成和校验都都两种原则,希望读者要对概念进行清晰地把握,不可一知半解:
汉明校验
{
按配偶原则的校验
按配奇原则的校验
\text{汉明校验}\begin{cases} \text{按配偶原则的校验}\\ \text{按配奇原则的校验} \end{cases}
汉明校验{按配偶原则的校验按配奇原则的校验
这里直接阐述配偶和配奇的原则会比较抽象,我们放到具体的例子中来看,会更加易懂。
-
确定校验位的个数
使用公式【 2 k ⩾ n + k + 1 2^{k}\geqslant n+k+1 2k⩾n+k+1】计算需要的k,其中 k 是检验位的数量,n 是数据位的数量;
举个逆子:原欲发送数据为:0101,此时我们可得n=4,则欲使 2 k ≥ 4 + k + 1 2^k\geq4+k+1 2k≥4+k+1,k最小为3,即校验位个数为3。
-
安置校验位
我们规定:所有的校验位均放置在第 2 n 2^n 2n位,也就是第1、2、4、8…位置等都是校验位,n从0开始,到k-1结束。
上例中k=3,则校验位的位置为:① 2 0 = 1 2^0=1 20=1;② 2 1 = 2 2^1=2 21=2;③ 2 2 2^2 22=4;即3位校验位放在最后要发送数据的第1,第2,第4个位置。
-
填充数据位:
在非校验位的其他位置上填写真正的数据,填充后汉明码应如如下形式才对:
c 1 c_1 c1 c 2 c_2 c2 0 c 3 c_3 c3 1 0 1 其中 c 1 c_1 c1, c 2 c_2 c2, c 3 c_3 c3为待确定值的校验位。
-
画表计算校验位的值
我们的原则是,位置代表的二进制写好后,每一行值为
1的二进制位分为一组;然后,你会发现,每一行校验位的位置是互斥的,只有一个校验位值为1。也就是说,一个校验位会和若干数值位搭配,组成一组。然后我们可以引出配奇和配偶原则了:
- 配奇原则:通过配置校验位
C
j
C_j
Cj,使得该组1的个数为奇数个,那么该组的各位进行异或操作必为
1 - 配奇原则:通过配置校验位
C
j
C_j
Cj,使得该组1的个数为偶数个,那么该组的各位进行异或操作必为
0
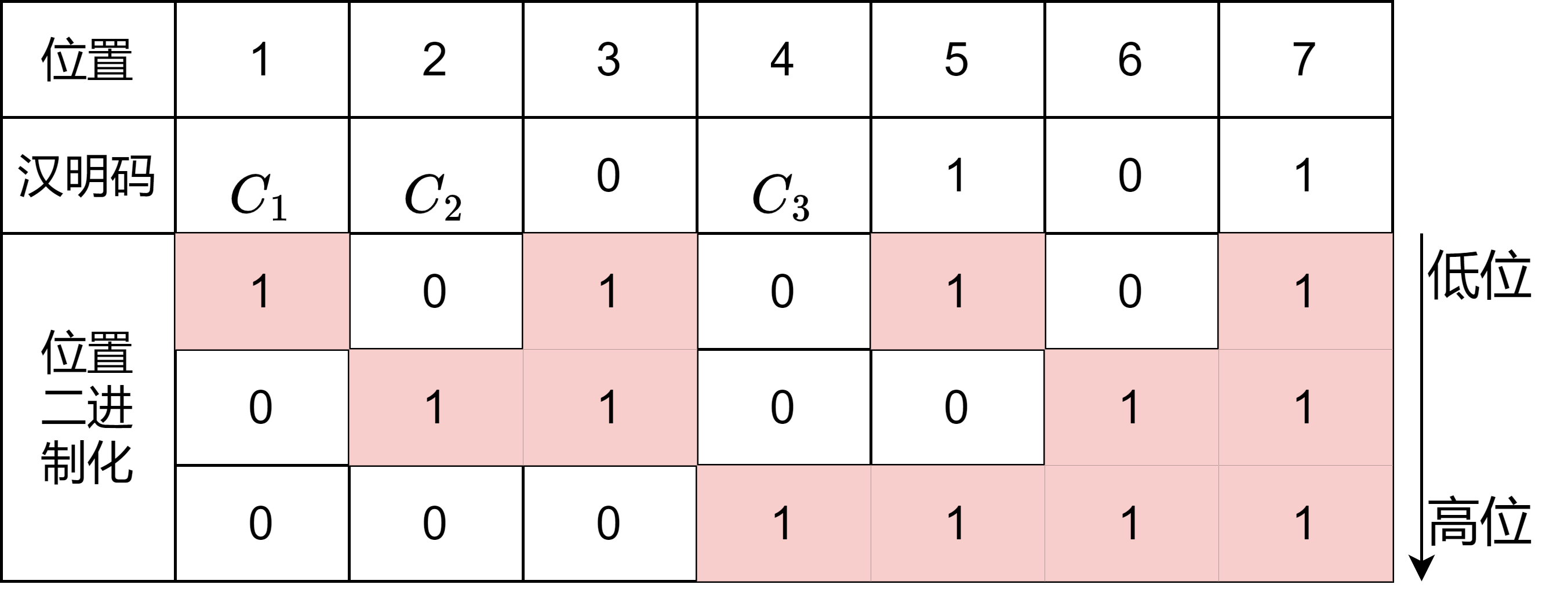
基于这样的发现,我们让同一组各数据位进行异或(两个二进制位异或,相同结果为0,不同为1)运算,按照配偶原则,可得结果如下计算所示:
配偶原则 { C 1 ⊕ 0 ⊕ 1 ⊕ 1 ⟹ C 1 = 0 C 2 ⊕ 0 ⊕ 0 ⊕ 1 ⟹ C 2 = 1 C 3 ⊕ 1 ⊕ 0 ⊕ 1 ⟹ C 3 = 0 \text{配偶原则}\begin{cases}C_1\oplus0\oplus1\oplus1\Longrightarrow C_1=0\\ C_2\oplus0\oplus0\oplus1\Longrightarrow C_2=1\\ C_3\oplus1\oplus0\oplus1\Longrightarrow C_3=0 \end{cases} 配偶原则⎩ ⎨ ⎧C1⊕0⊕1⊕1⟹C1=0C2⊕0⊕0⊕1⟹C2=1C3⊕1⊕0⊕1⟹C3=0
我们怎么理解上面的 C 1 C 2 C 3 C_1 C_2C_3 C1C2C3的取值?【 C 1 C_1 C1=0】,是因为和它一组的数据位为
011中有偶数个1,按照配偶原则,已经有偶数个1了,那我就不用管了;反之看第二组,【 C 2 C_2 C2=1】,这是因为第二组的数据位为001,只有奇数个1,按照配偶原则, C 2 C_2 C2要置1才能保证第二组的1为偶数个。第三组同理。刚好在这里把配奇的原则也讲一下,上面的 C 1 C 2 C 3 C_1 C_2C_3 C1C2C3如果按照配奇原则会是多少呢?如下(如果你理解了配偶原则,配奇也很简单):
配奇原则 { C 1 = 0 ⊕ 1 ⊕ 1 ‾ ⟹ C 1 = 1 C 2 = 0 ⊕ 0 ⊕ 1 ‾ ⟹ C 2 = 0 C 3 = 1 ⊕ 0 ⊕ 1 ‾ ⟹ C 3 = 1 \text{配奇原则}\begin{cases}C_1=\overline{0\oplus1\oplus1}\Longrightarrow C_1=1\\ C_2=\overline{0\oplus0\oplus1}\Longrightarrow C_2=0\\ C_3=\overline{1\oplus0\oplus1}\Longrightarrow C_3=1 \end{cases} 配奇原则⎩ ⎨ ⎧C1=0⊕1⊕1⟹C1=1C2=0⊕0⊕1⟹C2=0C3=1⊕0⊕1⟹C3=1
可见,配奇的结果和配偶的结果刚好相反,这是因为异或操作的原理使得如果同一组中的数据位有偶数个1那么异或必为0,那么取反得校验位为1,那么组合起来(数据位有偶数个1,校验位有1个1,相加肯定是奇数咯)1的个数就是奇数个咯,完成奇配置。 - 配奇原则:通过配置校验位
C
j
C_j
Cj,使得该组1的个数为奇数个,那么该组的各位进行异或操作必为
-
书写完整的汉明码(配偶原则)
如第四步所计算,得到三个校验位的值后,将其值填充到校验位所对应的位置,将校验位的值填充进行,写出完整的汉明码,上例的汉明码为
1 2 3 4 5 6 7 C 1 C_1 C1 C 2 C_2 C2 P 1 P_1 P1 C 3 C_3 C3 P 2 P_2 P2 P 3 P_3 P3 P 4 P_4 P4 0 1 0 0 1 0 1 -
书写完整的汉明码(配奇原则)
1 2 3 4 5 6 7 C 1 C_1 C1 C 2 C_2 C2 P 1 P_1 P1 C 3 C_3 C3 P 2 P_2 P2 P 3 P_3 P3 P 4 P_4 P4 1 0 0 1 1 0 1
按照配偶原则,假设我们收到了0110101,已知这是一个传输出错的汉明码
按照配偶原则,假设我们收到了1001100,已知这是一个传输出错的汉明码
-
提取小组(配偶原则)
0110101总位数为7,则易推得校验位为3位;再根据分组规则,我们可得到三组数据如下:
- 组1(1357)=0111
- 组2(2367)=1101
- 组3(4567)=0101
-
提取小组(配奇原则)
1001100总位数为7,则易推得校验位为3位;再根据分组规则,我们可得到三组数据如下:
- 组1(1357)=1010
- 组2(2367)=0000
- 组3(4567)=1100
-
校验(配偶原则)
我们按照配偶原则,将原来的分组的各组各位异或运算,若为
0则表示该位没出错,否则表示出错。上述汉明码,我们进行如下计算:
g 1 = 0 ⊕ 1 ⊕ 1 ⊕ 1 = 1 g 2 = 1 ⊕ 1 ⊕ 0 ⊕ 1 = 1 g 3 = 0 ⊕ 1 ⊕ 0 ⊕ 1 = 0 g1=0\oplus1\oplus1\oplus1=1\\ g2=1\oplus1\oplus0\oplus1=1\\ g3=0\oplus1\oplus0\oplus1=0 g1=0⊕1⊕1⊕1=1g2=1⊕1⊕0⊕1=1g3=0⊕1⊕0⊕1=0
欸,汉明码只能纠错1位,那到底是哪一位出错了呢?其实呀,这里并不能只管看出来,但是汉明码的神奇之处就在于,校验后的k位数值的二进制逆序组合转化为十进制表示的数值就是出错的位置。如上例,计算完得到 g 1 g 2 g 3 g_1g_2g_3 g1g2g3=
110,我们逆序得到011,其十进制表示3,那么就是第三位出错了,瞅瞅是不是发的是0100101接收到的是0110101,确实是第3位出错了。 -
校验(配奇原则)
我们按照配奇原则,将原来的分组的各组各位异或后取反运算,若为
0则表示该位没出错,否则表示出错。上述汉明码,我们进行如下计算:
g 1 = 1 ⊕ 0 ⊕ 1 ⊕ 0 ‾ = 1 g 2 = 0 ⊕ 0 ⊕ 0 ⊕ 0 ‾ = 1 g 3 = 1 ⊕ 1 ⊕ 0 ⊕ 0 ‾ = 1 g1=\overline{1\oplus0\oplus1\oplus0}=1\\ g2=\overline{0\oplus0\oplus0\oplus0}=1\\ g3=\overline{1\oplus1\oplus0\oplus0}=1 g1=1⊕0⊕1⊕0=1g2=0⊕0⊕0⊕0=1g3=1⊕1⊕0⊕0=1
此时得到 g 1 g 2 g 3 g_1g_2g_3 g1g2g3=111,逆序得到111。111十进制表示7,那么第七位出错了;检查一下呗,发的是1001101接收到的是1001100,确实是第7位出错了。

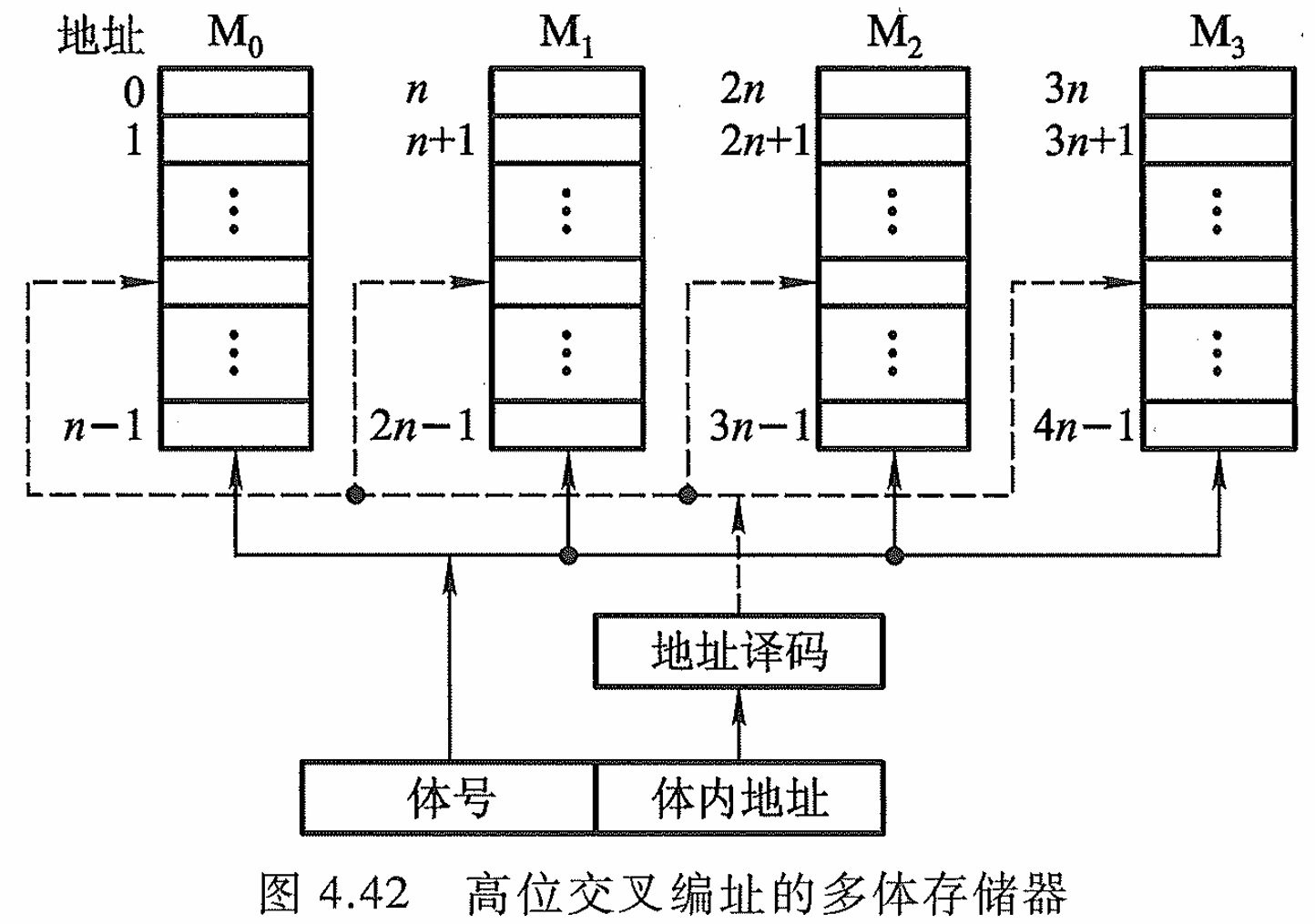
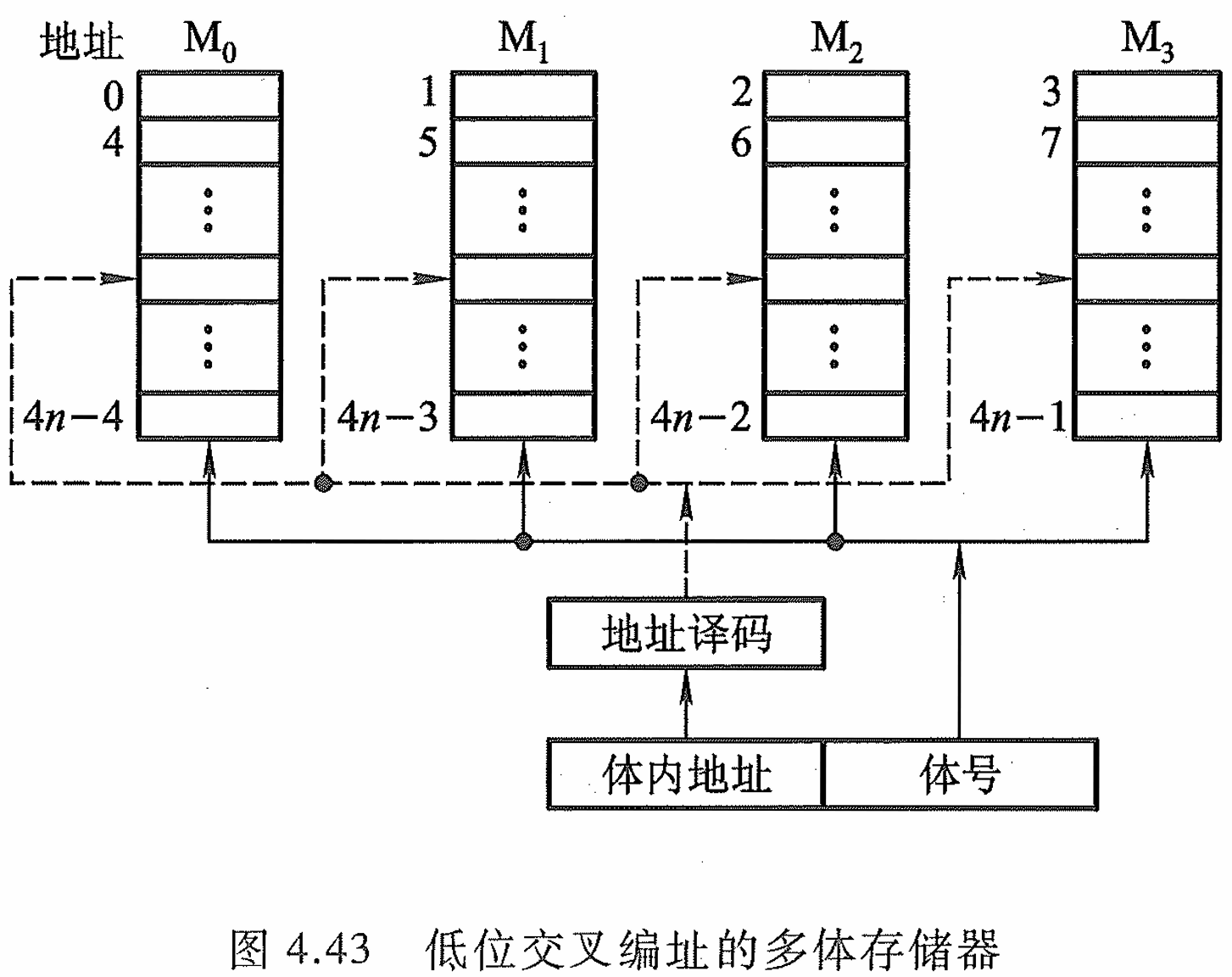
4.2.8 提高访存速度的措施(多位交叉)
-
多体并行系统:高位交叉可以用于容量的扩展,低位交叉可以提高带宽和访问速度
4.3 高速缓冲存储器
4.3.1 概述
-
程序局部性原理
- 时间局部性:被引用过一次的存储器位置在未来会被多次引用(通常在循环中)。
- 空间局部性:如果一个存储器的位置被引用,那么将来他相邻的位置也会被引用。
-
存储墙
存储器提供数据的速度远远落后处理器处理数据的速度,存储器速度成为各类计算体系的最大瓶颈。
-
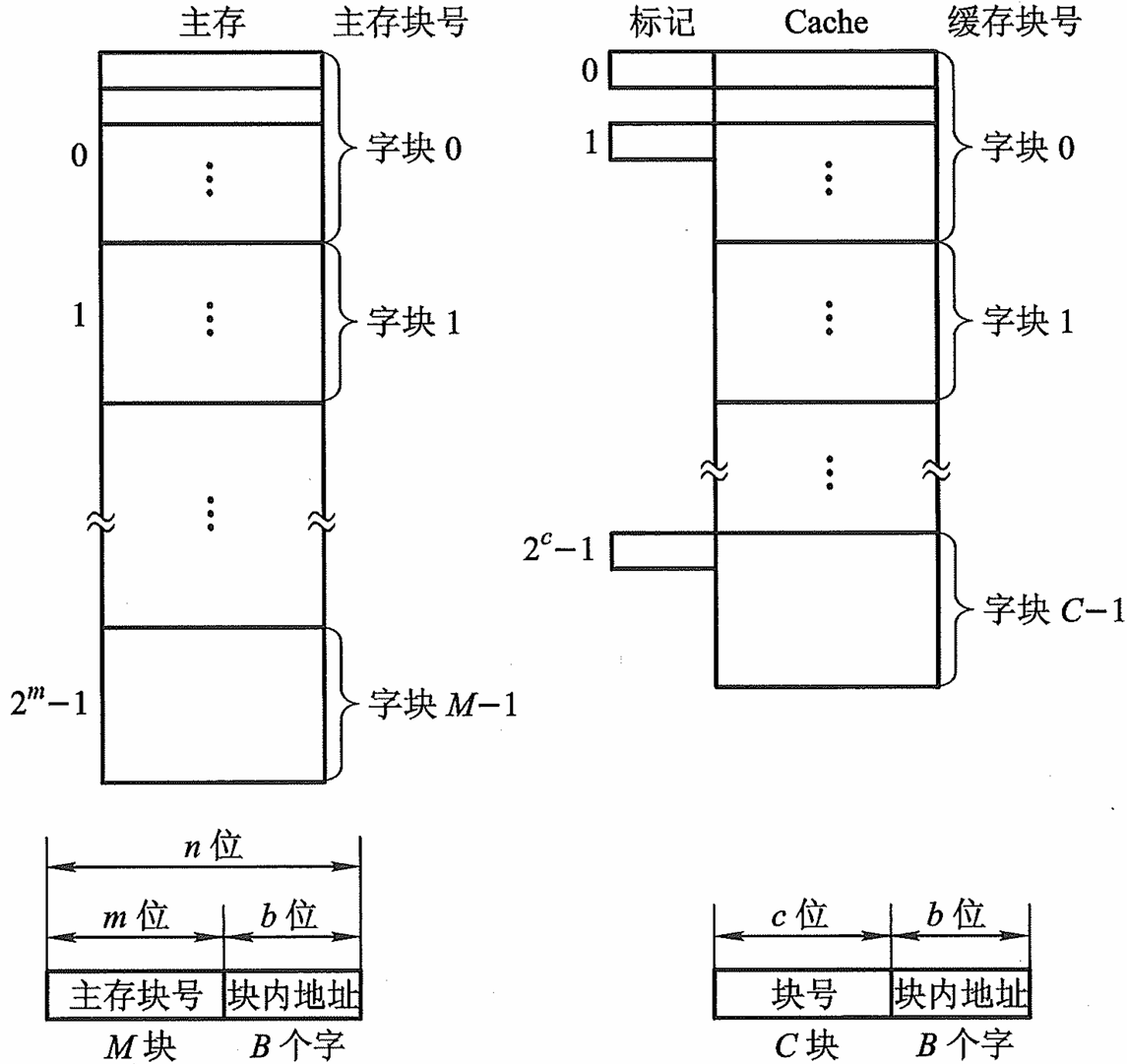
Cache——主存的基本结构图
在图中,主存与缓存之间块的数量是有着巨大差异的,因此必须有一种方案,使得缓存的块能对应到主存的块上;这种方式是做标记,比如上图Cache字块0的标记是0,因此字块0存储的信息来自于主存的信号0。
-
命中与未命中
- 命中:【主存块】 调入 缓存,【主存块】与【缓存块】建立 了对应关系,
- 未命中:主存块 未调入 缓存,主存块与缓存块 未建立 对应关系
-
Cache的命中率、Cache-主存平均访问时间、访问效率
-
命中率
h = N c N c + N m h=\frac{N_c}{N_c+N_m} h=Nc+NmNc
其中 N c N_c Nc 为访问 Cache 的总命中次数, N m N_m Nm为访问主存的总次数, h h h为命中率 -
Cache-主存平均访问时间
t a = h t c + ( 1 − h ) t m t_{_a}=ht_{_c}+\left(\begin{array}{c}1-h\end{array}\right)t_{_m} ta=htc+(1−h)tm
其中 t c t_{c} tc为命中时的 Cache 访问时间, t m t_{m} tm为未命中时的主存访问时间, 1 − h 1-h 1−h 表示未命中率, t a t_{a} ta为Cache-主存平均访问时间 -
访问效率
e = t c t a × 100 % = t c h t c + ( 1 − h ) t m × 100 % e=\frac{t_c}{t_a}\times100\%=\frac{t_c}{ht_c+(\begin{array}{c}1-h\end{array})t_m}\times100\% e=tatc×100%=htc+(1−h)tmtc×100%
-
-
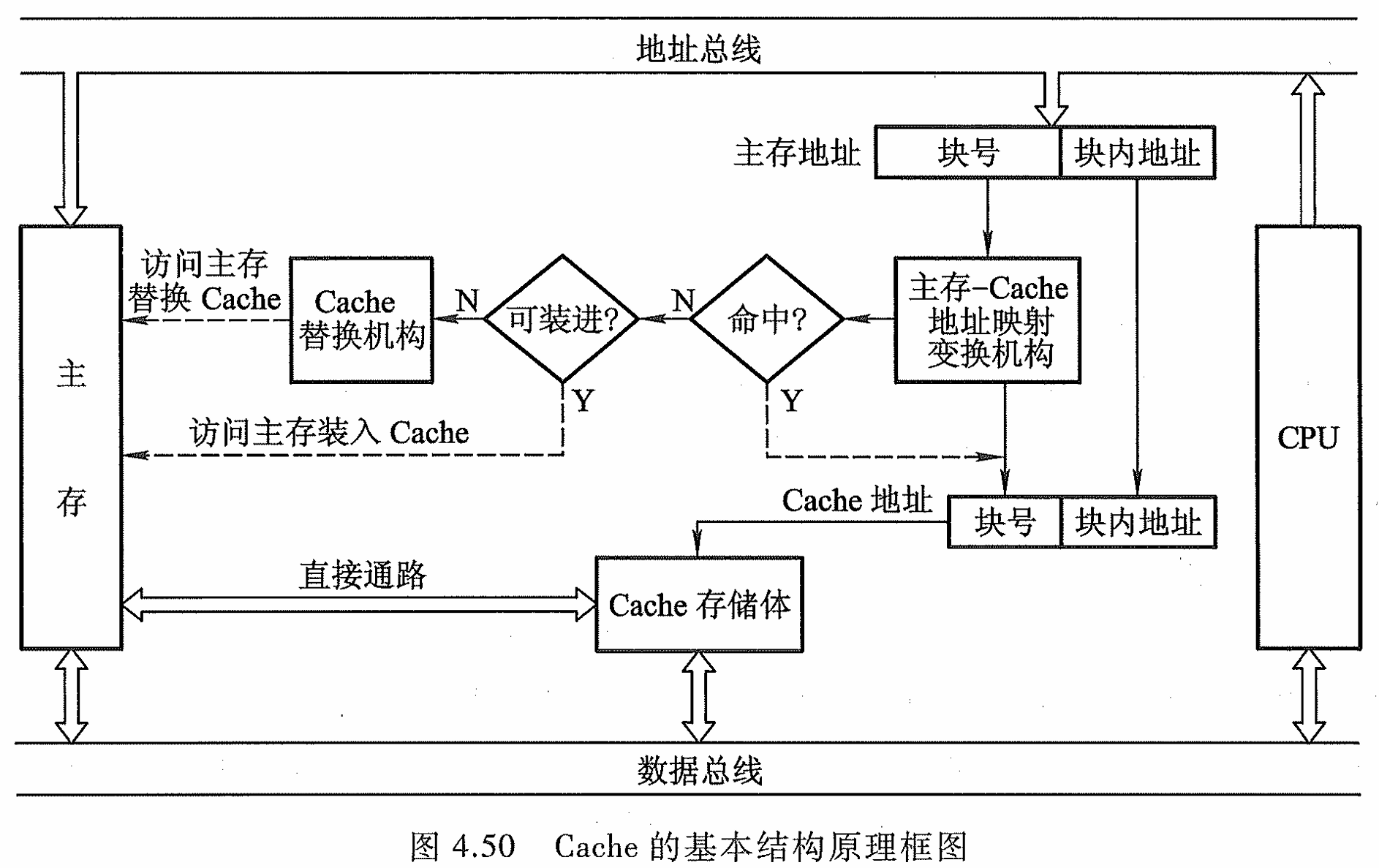
Cache的基本结构
-
主存块调入Cache的任务全部由硬件自动完成
-
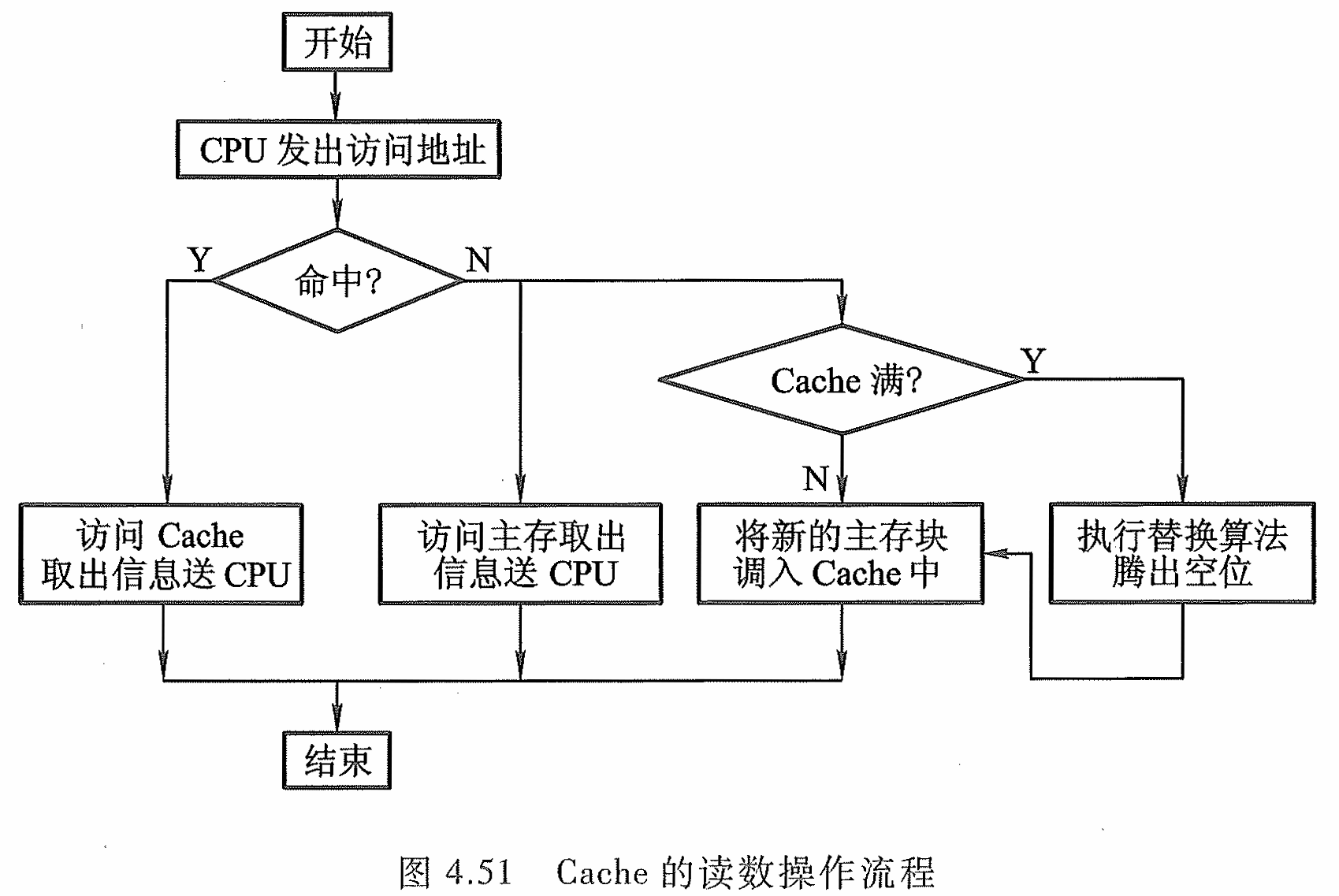
Cache的读数操作流程图
-
Cache的写操作方法
-
写直达法
写操作时数据既写入 Cache 又写入主存。它能随时保证主存和 Cache 的数据始终一致,但增加了访存次数;这种方法由于需要和内存进行容量匹配,因此数据范围较小。
-
写回法
写操作时只把数据写入 Cache 而不 写入主存,仅当 Cache 数据被替换出去时才写回主存。
-
-
统一缓存与分立缓存:
- 统一缓存是指指令和数据都存放在同一缓存内的 Cache
- 分立缓存是指指令和数据分别存 放在两个缓存中,一个称为指令 Cache,另一个称为数据 Cache
- 如果计算机的主存是统一的(指令、数据存储在同一主存内),则 相应的 Cache 采用统一缓存;如果主存采用指令、数据分开存储的方案,则相应的 Cache 采用分 立缓存。
- 当采用超前控制或流水线控制方式时,一般都 采用分立缓存。
-
4.3.2 Cache-主存地址映射
-
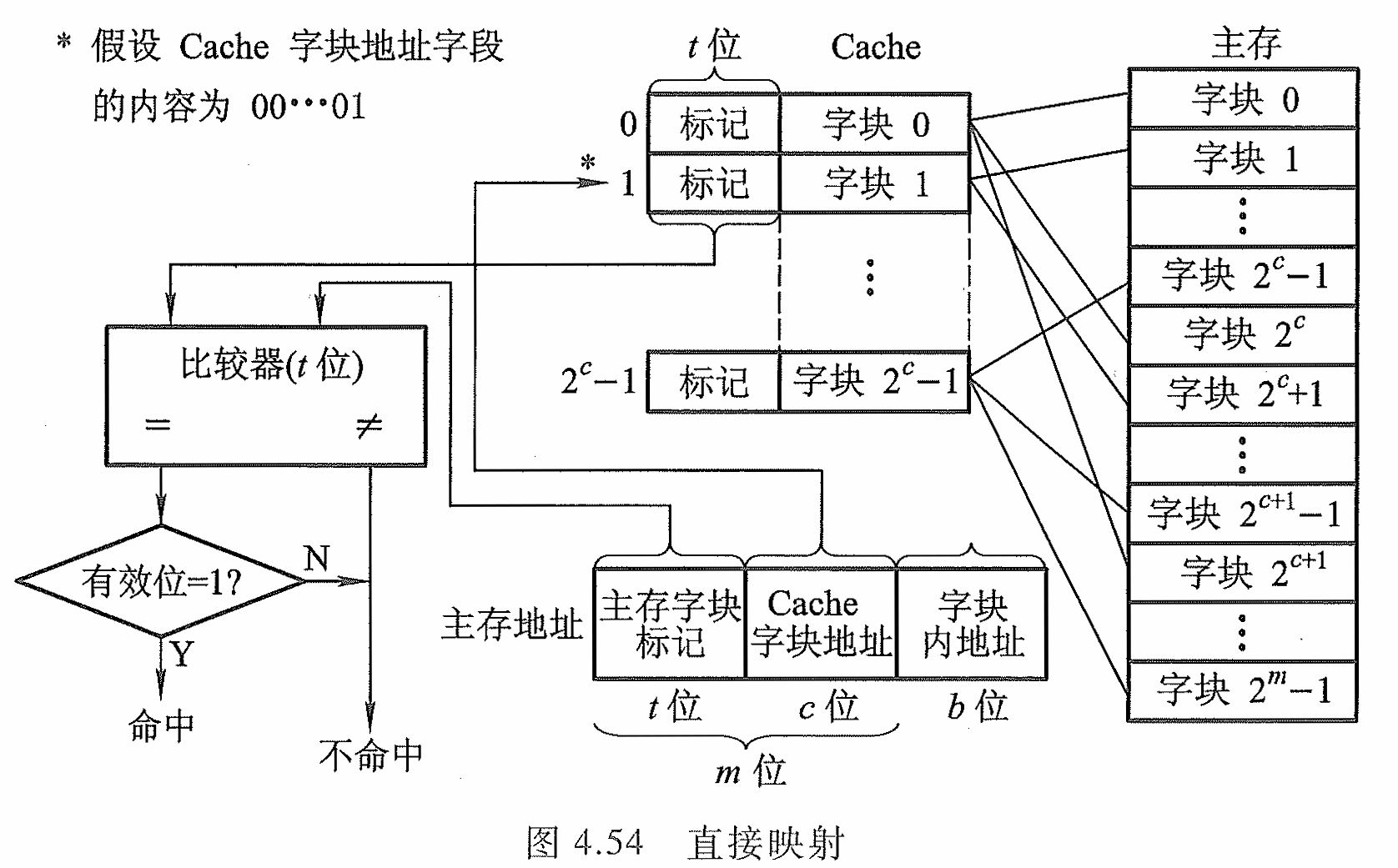
直接映射
-
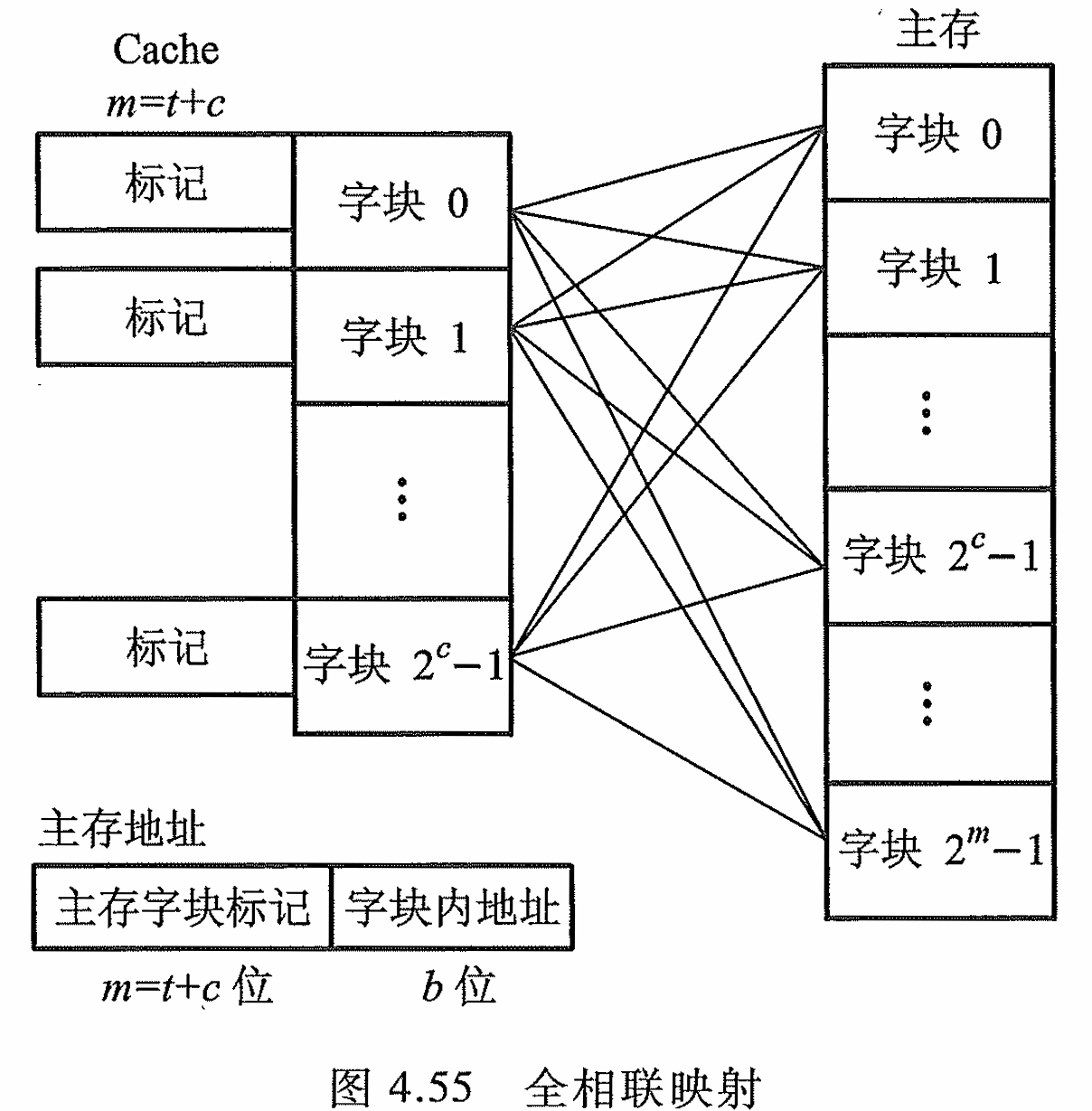
全相联映射
- 优点:方式灵活,命中率也更高, 缩小了块冲突率
- 缺点:访问 Cache 时主存字块标记需要和 Cache 的全部“标记”位进行比较,才能 判断出所访问主存地址的内容是否已在 Cache 内
-
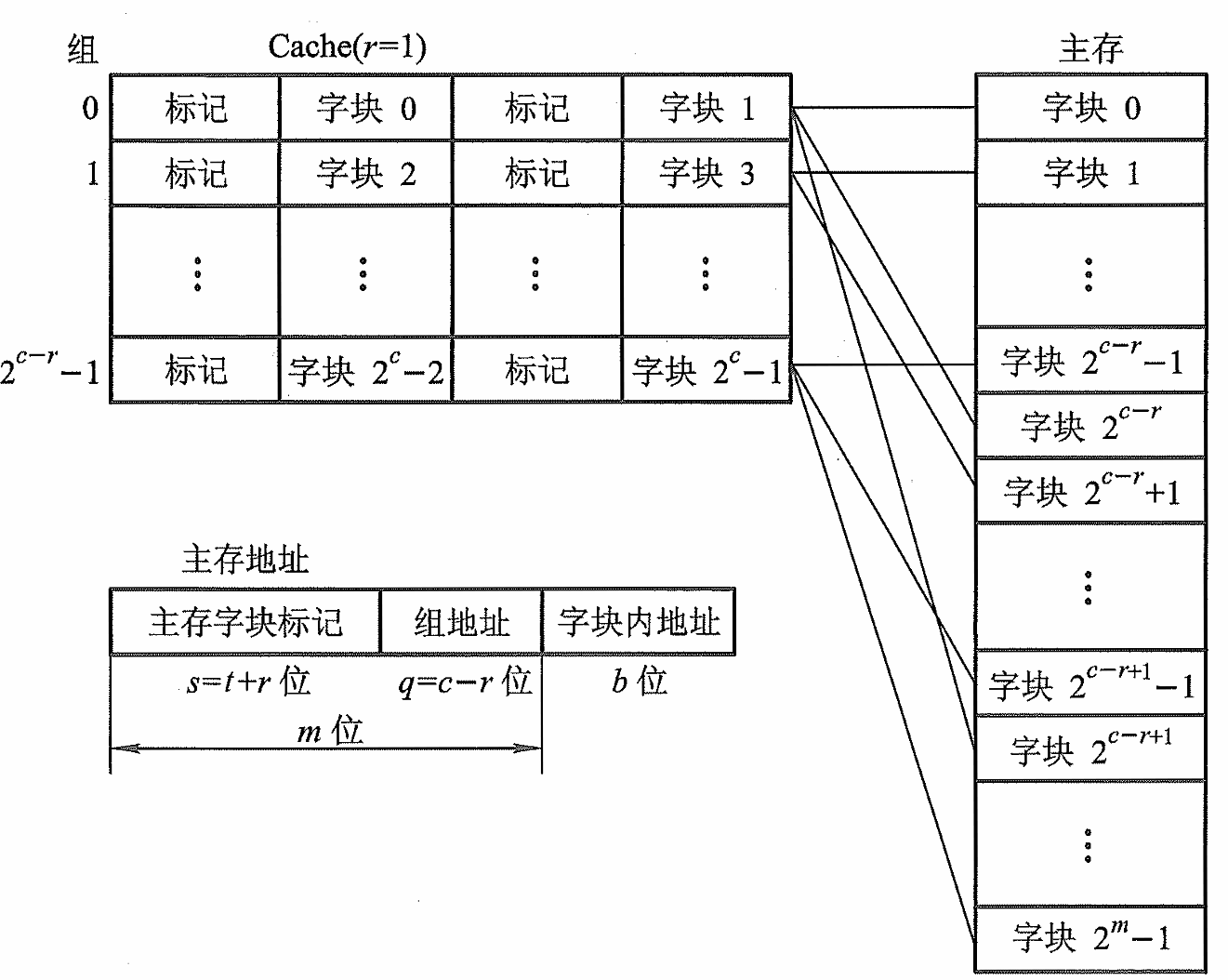
组相联映射
当r=0时是直接映射,当r=c时是全相联映射。
4.4 循环冗余校验码
-
编码步骤
- 给定【信息码】,给定【生成多项式】
- 根据【生成多项式】确定确定校验位的长度【k】,以及【模2除的除数】
- 确定被除数,【被除数=信息码+k个0】
- 使用模2除方法确定余数,【余数作为校验位】
- 用【校验位】替换刚才添加到信息码后面的0后面组成【CRC】码
-
举例
已知有效信息为 1100,试用生成多项式 G(x)= 1011 将其编成 CRC 码。
-
确定校验位长度k-1,以及除数
将生成多项式还原成代数形式为:
G ( x ) = x 3 + x + 1 \mathrm{G(x)=x^3+x+1} G(x)=x3+x+1
那么有
k = m a x ( i G ( x ) ) = 3 \mathrm{k=max(i_{G(x)})}=3 k=max(iG(x))=3
其含义为【k=生成多项式的最高次=3】。且我们有【除数=生成多项式的数值形式】,所以题目已经给出了除数就是【1011】
-
确定被除数
有效信息为【1100】,【k=3】,那么【被除数=有效信息+0*k=1100 000】
-
确定校验位(余数)
除 数 商 1 1 1 0 1 0 1 1 被除数 1 1 0 0 0 0 0 1 0 1 1 1 1 1 0 1 0 1 1 1 0 1 0 1 0 1 1 0 1 0 余数 -
书写CRC码制
1100 010
-
-
校验步骤
校验直接用收到的CRC码模2除我们当初确定的除数,如果余数为0则信息未出错,否则出错。
假设使用上例生成的CRC码,且我们收到的是1100 011,除数为1011
则经如下校验,发现出错,因为余数不为0(余1):
除 数 商 1 1 1 0 1 0 1 1 被除数 1 1 0 0 0 1 1 1 0 1 1 1 1 1 0 1 0 1 1 1 0 1 1 1 0 1 1 0 0 1 1 余数
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 计算机组成原理笔记-第4章 存储器

发表评论 取消回复