1.c++虚函数
虚函数是用来实现多态(polymorphism) 的一种机制。通过使用虚函数,可以在子类中重写父类中定义的方法,并且在运行时动态地确定要调用哪个方法。
在类定义中将一个成员函数声明为虚函数,需要使用 virtual 关键字进行修饰 。
通过指向派生类对象的基类指针或引用调用虚函数时,程序会根据对象的实际类型来调用相应的方法。
2.Softmax函数和Sigmoid函数的区别与联系
Sigmoid函数
Sigmoid =多标签分类问题=多个正确答案=非独占输出(例如胸部X光检查、住院)。构建分类器,解决有多个正确答案的问题时,用Sigmoid函数分别处理各个原始输出。
Sigmoid函数是一种logistic函数,它将任意的值转换到 之间
Softmax =多类别分类问题=只有一个正确答案=互斥输出(例如手写数字,鸢尾花)。构建分类器,解决只有唯一正确答案的问题时,用Softmax函数处理各个原始输出值。Softmax函数的分母综合了原始输出值的所有因素,这意味着,Softmax函数得到的不同概率之间相互关联。
Softmax函数是二分类函数Sigmoid在多分类上的推广,目的是将多分类的结果以概率的形式展现出来。
Softmax可以由三个不同的角度来解释。从不同角度来看softmax函数,可以对其应用场景有更深刻的理解:
(1)softmax可以当作arg max的一种平滑近似,与arg max操作中暴力地选出一个最大值(产生一个one-hot向量)不同,softmax将这种输出作了一定的平滑,即将one-hot输出中最大值对应的1按输入元素值的大小分配给其他位置。
(2)softmax将输入向量归一化映射到一个类别概率分布,即
个类别上的概率分布(前文也有提到)。这也是为什么在深度学习中常常将softmax作为MLP的最后一层,并配合以交叉熵损失函数(对分布间差异的一种度量)。
(3)从概率图模型的角度来看,softmax的这种形式可以理解为一个概率无向图上的联合概率。因此你会发现,条件最大熵模型与softmax回归模型实际上是一致的,诸如这样的例子还有很多。由于概率图模型很大程度上借用了一些热力学系统的理论,因此也可以从物理系统的角度赋予softmax一定的内涵。
总结
如果模型输出为非互斥类别,且可以同时选择多个类别,则采用Sigmoid函数计算该网络的原始输出值。如果模型输出为互斥类别,且只能选择一个类别,则采用Softmax函数计算该网络的原始输出值。Sigmoid函数可以用来解决多标签问题,Softmax函数用来解决单标签问题。[1]对于某个分类场景,当Softmax函数能用时,Sigmoid函数一定可以用。
二分类任务
对于二分类问题来说,理论上,两者是没有任何区别的。由于我们现在用的Pytorch、TensorFlow等框架计算矩阵方式的问题,导致两者在反向传播的过程中还是有区别的。实验结果表明,两者还是存在差异的,对于不同的分类模型,可能Sigmoid函数效果好,也可能是Softmax函数效果。
3.l1和l2正则化的区别是什么
L1/L2的区别
L1是模型各个参数的绝对值之和。L2是模型各个参数的平方和的开方值。
L1会趋向于产生少量的特征,而其他的特征都是0。
因为最优的参数值很大概率出现在坐标轴上,这样就会导致某一维的权重为0 ,产生稀疏权重矩阵
L2会选择更多的特征,这些特征都会接近于0。
最优的参数值很小概率出现在坐标轴上,因此每一维的参数都不会是0。当最小化||w||时,就会使每一项趋近于0。
L1的作用是为了矩阵稀疏化。假设的是模型的参数取值满足拉普拉斯分布。
L2的作用是为了使模型更平滑,得到更好的泛化能力。假设的是参数是满足高斯分布。
4.介绍svm算法
是一种二分类模型,它的基本模型是定义在特征空间上的间隔最大的线性分类器,间隔最大使它有别于感知机。
SVM可分为三种:
线性可分SVM
当训练数据线性可分时,通过最大化硬间隔(hard margin)可以学习得到一个线性分类器,即硬间隔SVM。
线性SVM
当训练数据不能线性可分但是近似线性可分时,通过最大化软间隔(soft margin)也可以学习到一个线性分类器,即软间隔SVM。
非线性SVM
当训练数据线性不可分时,通过使用核技巧(kernel trick)和最大化软间隔,可以学习到一个非线性SVM。
SVM的的学习策略就是间隔最大化,可形式化为一个求解凸二次规划的问题,也等价于正则化的合页损失函数的最小化问题。SVM的的学习算法就是求解凸二次规划的最优化算法。
SVM如何选择核函数
Linear核:主要用于线性可分的情形。参数少,速度快,对于一般数据,分类效果已经很理想了。
RBF核:主要用于线性不可分的情形。参数多,分类结果非常依赖于参数。有很多人是通过训练数据的交叉验证来寻找合适的参数,不过这个过程比较耗时。
5.介绍transformer算法
Transformer本身是一个典型的encoder-decoder模型,Encoder端和Decoder端均有6个Block,Encoder端的Block包括两个模块,多头self-attention模块以及一个前馈神经网络模块;Decoder端的Block包括三个模块,多头self-attention模块,多头Encoder-Decoder attention交互模块,以及一个前馈神经网络模块;需要注意:Encoder端和Decoder端中的每个模块都有残差层和Layer Normalization层。
6.1x1大小的卷积核的作用
通过控制卷积核个数实现升维或者降维,从而减少模型参数。
对不同特征进行归一化操作。
用于不同channel上特征的融合。
7.空洞卷积及其优缺点
pooling操作虽然能增大感受野,但是会丢失一些信息。空洞卷积在卷积核中插入权重为0的值,因此每次卷积中会skip掉一些像素点;
空洞卷积增大了卷积输出每个点的感受野,并且不像pooling会丢失信息,在图像需要全局信息或者需要较长sequence依赖的语音序列问题上有着较广泛的应用。
8.介绍Transformer中的Q K V
- q代表的是query查询,后续会和每一个k进行匹配,找到最相似的k
- k代表的是key关键字,后续会被每一个q匹配
- v代表的是value值,代表从输入中提到的信息
- Q、K、V概念来源于检索系统,其中Q为Query、K为Key、V为Value。可以简单理解为Q与K进行相似度匹配,匹配后取得的结果就是V。举个例子我们在某宝上搜索东西,输入的搜索关键词就是Q,商品对应的描述就是K,Q与K匹配成功后搜索出来的商品就是V。
注意:每一个key,都对应一个value;计算query和key的匹配程度就是计算两者相关性,相关性越大,代表key对应value的权重也就越大,这就是不同信息的权重不一样,这就是注意力机制!
例如:
图书馆里有很多书(value),为了方便查找,我们给书做了编号(key)。当我们想要了解漫威这本书(query)的时候,我们就可以看看那些动漫、电影、甚至二战(美国队长)相关的书籍。
9.self-attention的公式
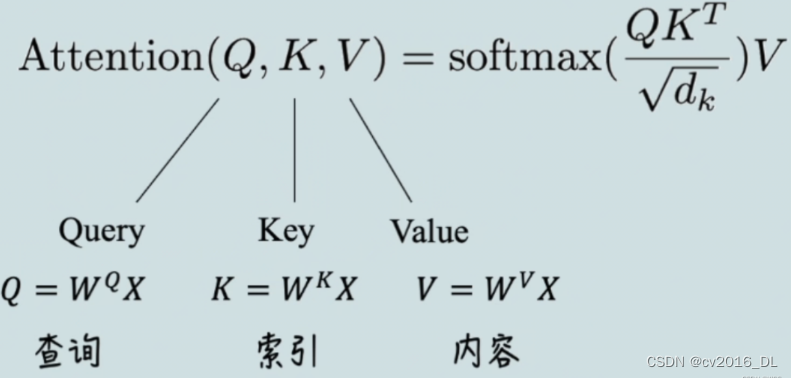
其中,X XX表示输入的数据,Q , K , V Q,K,VQ,K,V对应内容如图,其值都是通过X XX和超参(先初始化,后通过训练优化)进行矩阵运算得来的。
可以理解为:Self-Attention中的Q是对自身(self)输入的变换,而在传统的Attention中,Q来自于外部。
10.目标跟踪算法中卡尔曼滤波的作用是什么
其有两个前提假设:
系统对运动的建模是线性(linear)的;
噪声是符合正态分布(Gaussian)的;
1.卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波)过程。
2、在跟踪中卡尔曼滤波可以基于目标前一时刻的位置,来预测当前时刻的位置,并且可以比传感器更准确的估计目标的位置。
3.卡尔曼滤波不需要前面的历史数据,只需要前一时刻的状态数据就可以进行预测。
11.Focal loss介绍
FOCAL LOSS是一种针对样本不平衡问题的一种损失函数,用于解决分类器在处理高度偏斜数据集时的困难问题。具体来说,FOCAL LOSS通过调整常规交叉熵损失函数中每个正负样本的权重,使得模型更加关注那些难以分类的样本,从而提高模型在少数类上的分类准确率。
FOCAL LOSS最初由Lin等人于2017年在论文"Focal Loss for Dense Object Detection"中提出,主要应用于目标检测任务中的多目标分类问题。该损失函数的表达式如下:
$$FL(p_t)=-(1-p_t)^\gamma\log(p_t)$$
其中,$p_t$是模型预测的概率值,$\gamma$是一个可调整的超参数,用于控制难易样本的权重。当$\gamma$=0时,FOCAL LOSS退化为普通的交叉熵损失;当$\gamma>0$时,FOCAL LOSS会降低容易分类的样本的权重,增加难分类样本的权重。
FOCAL LOSS的主要思想是通过降低简单样本的权重,增加难分类样本的权重,来达到处理不平衡数据的目的。在实践中,FOCAL LOSS已经被广泛地应用于各种图像分类、目标检测和语义分割等任务中,取得了较好的效果。
12.匈牙利分配
参考:采用匈牙利算法求解分配问题_匈牙利分配算法-CSDN博客
分配问题也称指派问题,是一种特殊的整数规划问题,分配问题的要求一般是这样的:n个人分配n项任务
简单的说:就是n*n矩阵中,选取n个元素,每行每列各有一个元素,使得和最小。
什么是匈牙利算法?
1)理论基础:
若从指派问题的系数矩阵的某行(列)各元素中分别减去或者加上常数k,其最优任务分配问题不变。
2)匈牙利算法的流程图
Step 1: 行归约
找出每行的最小元素,分别从每行中减去这个最小元素;
Step 2 : 列归约
找出每列的最小元素,分别从每列中减去这个最小元素
经过以上两步变换,矩阵的每行每列都至少有了一个零元素。接下来就进行第三步,试着指派任务。
Step 3 : 指派任务
① 确定独立零元素。
i 从第一行(列)开始,若该行(列)中只有一个零元素,对该零元素标1,表示这个任务就指派给某人做。
每标一个1,同时将该零元素同列的其他零元素标为2,表示此任务已不能由其他人来做。(此处标1、2的操作与课本画圈、划去操作同理)
如此反复进行,直到系数矩阵中所有的零元素都已经被标为1或者2为止。
② 指派
我们观察到,系数矩阵中标记为1的零元素正好等于4,这表示已经确定了最优的指派方案。
此时,只需将0(1)所在位置记为1,其余位置记为0,则获得了该问题的最优解。
异常情况
上例仅为一种理想情况正常情况下,我们在对支付矩阵进行变换时会出现两种情况:
① 出现零元素的闭合回路
②标记成1的元素个数小于n
这两种情况导致支付矩阵中独立零元素出现不足。
i.出现零元素的闭合回路(有多于两行或两列存在两个以上的零元素。)
图的第一行的一二列零元素和第四行的一二列零元素构成回路
这里我们的处理方法是:
先对cost方阵做一个备份(因为会出现多解),然后我们可以顺着回路的走向,对间隔的零元素标记成1,然后对标记成1的零元素所有的行列划一条直线,把这两条直线的其他零元素标记成2,得到一种结果后,再求出多解。
ii. 矩阵中所有标记成1的零元素小于n
因此,我们需要对其进行【画盖0线】的操作。(即画出可以覆盖最多0元素的直线)
(1)画盖0线:利用最少的水平线和垂直线覆盖所有的零。
具体操作如下:
① 对没有标记为1的零元素所在的行打√;
②在已打“√”的行中,对标记为2的零元素所在列打√
③ 在已打“√”的列中,对标记为1的零元素所在行打“√”
④重复②和③,直到再不能找到可以打√的行或列为止。
⑤对没有打“√”的行画一横线,对打“√”的列画一垂线,这样就得到了覆盖所有零元素的最少直线数目的直线集合。
(2)继续变换系数矩阵
①在未被覆盖的元素中找出一个最小元素。
②对未被覆盖的元素所在行中各元素都减去这一最小元素。这时已被覆盖的元素中会出现负元素。
③对负元素所在的列中各元素加上这一最小元素。
Step4
我们发现,在经过一次变换后,独立零元素的个数仍然少于4.此时返回第三步,反复进行,直到矩阵中每一行都有一个被标记为1的元素为止。
13.Mosaic数据增强方法
Mosaic是一种数据增强方法,可以用于训练物体检测模型,其中在随机裁剪的4张图片上进行拼接,以生成一个大的马赛克图像。
在YOLOv4中,Mosaic数据增强可以通过以下步骤实现:
- 随机选择四张不同的图片。
- 对这四张图片进行随机的缩放和平移操作,使它们的大小、位置不同。
- 将这四张图片按照某种规则进行拼接,形成一个大的马赛克图像。通常情况下,将四张图片分别放置在左上、右上、左下和右下的位置上,然后进行拼接。
- 在拼接后的大图像上进行随机裁剪,得到多个大小不同的子图像。
- 对每个子图像进行标注,并将它们作为训练数据输入给YOLOv4模型进行训练。
通过使用Mosaic数据增强,可以有效地增加训练数据的多样性,提高模型的准确率和鲁棒性。此外,由于Mosaic数据增强可以同时使用多张图片进行训练,因此可以节省GPU内存,提高训练效率。
14.协方差
协方差是用来衡量两个变量之间线性相关程度的统计量,它描述的是这两个变量同时偏离自身均值时所产生的期望值。协方差可以是正数、负数或者零。
具体来说,如果两个变量的协方差为正数,则表明这两个变量的变化趋势是相同的;如果协方差为负数,则表明这两个变量的变化趋势是相反的;如果协方差为零,则表明这两个变量之间不存在线性相关关系。
协方差可以用以下公式来计算:
cov(X,Y) = E[(X-μ_X)(Y-μ_Y)]
其中,X和Y是要计算协方差的两个随机变量,μ_X和μ_Y分别是这两个随机变量的均值,E[ ]表示期望值运算符。
在实际应用中,协方差通常被用作衡量两个变量之间的联合变化程度。例如,当我们研究两种产品的销售量时,可以计算它们的销售量之间的协方差,以了解它们之间的关系强度。另外,在金融领域,协方差也常被用于构建投资组合模型,以评估不同投资品种之间的风险和收益关系。
15.BN的理论
Batch Norm的优点:
- 可以使用大的学习率加快训练
- 使得网络对权重初始化依赖程度降低
- 可以缓解网络的过拟合问题
训练时,以mini-batch为单位,进行归一化操作。如下计算公式:
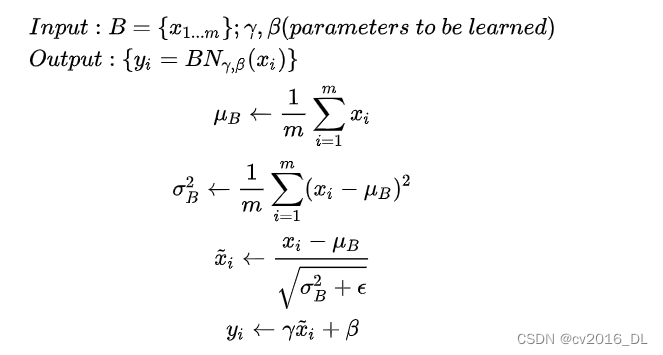
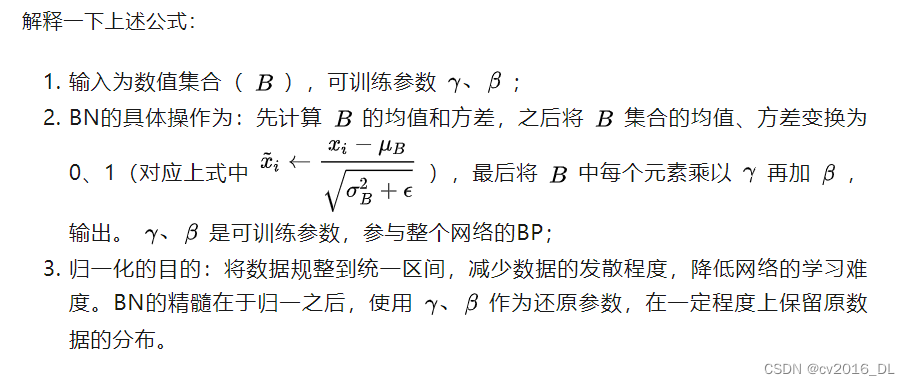
对mini-batch中m个数据计算均值和方差,之后通过减去均值,除以标准差的变换,将输入数据分布重新调整到均值为0、方差为1。
接下来,BatchNorm层会对归一化后的数据利用下述公式进行缩放和平移的变换:
初始化时,γ = 1, β = 0,之后再通过训练迭代,将这两个超参数调整到合适的值。
加入平移和缩放的原因是,不一定所有数据都服从标准正态分布,通过平移和缩放可以使得归一化后的数据保留原有学习来的特征,同时还完成归一化操作,加速了训练。
因此BN层是以mini-batch为单位,沿着通道维度进行的:
算法如下:
需要注意的是,
- 在训练时,需要利用每一批数据(batch)计算均值和方差。
- 在测试时,用训练中通过移动平均法保存的均值和方差作为参数。
- 当一个模型训练完成之后,BN层所有参数:均值、方差、γ和β就都确定了。
BN层的反向传播过程利用链式求导法则,求解dγ、dβ和dx即可。需要强调的是求解dx。均值、方差也都是包含x的函数,因此对x求导时,需要考虑进去,推导过程比较繁琐,可以用batch=2只有x1,x2两个输入情况进行推导,之后推广到batch=m
注意到代码中:
-
beta、gamma在训练状态下,是可训练参数,在推理状态下,直接加载训练好的数值。
-
moving_mean、moving_var在训练、推理中都是不可训练参数,只根据滑动平均计算公式更新数值,不会随着网络的训练BP而改变数值;在推理时,直接加载储存计算好的滑动平均之后的数值,作为推理时的均值和方差。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 算法常见问题

发表评论 取消回复