目录
前言
小试牛刀
一、加密解密图像
1.常用的算法
1.1 空间域加密技术:
空间域加密技术直接在图像的像素级进行操作。例如,最低有效位(LSB)替换是一种简单的方法,它将秘密信息嵌入到图像的像素的最低有效位中,因为人眼对这些微小的变化不敏感。
1.2 基于频域的水印技术:
频域技术首先将图像从空间域转换到频域(例如,使用DFT、DCT等)。在频域中,可以对图像的频率成分进行操作,如添加水印或修改频率成分,然后再将图像转换回空间域。
基于小波变换的图像加密算法:
小波变换能够将图像分解为不同的频率层次,基于小波变换的加密算法通常涉及对这些小波系数进行修改,例如通过混沌序列来扰乱小波系数,实现加密。
1.3 Arnold变换:
Arnold变换是一种经典的图像置乱技术,它通过周期性地应用一个线性变换(通常是一个旋转矩阵),来改变图像像素的位置,从而实现加密。
1.4 DES与AES算法:
DES(数据加密标准)和AES(高级加密标准)都是对称密钥加密算法。它们使用相同的密钥进行加密和解密。这些算法通过一系列复杂的替换和置换操作来改变数据的表示,从而实现加密。
2.实验
我们利用了混沌理论的不可预测性和Arnold变换的置乱效果来实现图像的加密解密
Arnold变换,又称Arnold cat map,是一种在图像加密领域中常用的线性变换技术,用于实现图像的置乱。这种变换得名于数学家Vladimir Arnold,它在数学上具有混沌理论的特性,能够产生高度随机化和不可预测的变换结果。以下是Arnold变换的详细介绍:
定义与数学表达式
Arnold变换通常定义在二维空间上,其数学表达式如下:
给定一个二维点 ( (i, j) ),经过Arnold变换后的新位置 ( (i’, j’) ) 由以下公式确定:
[ i’ = (i + j) \mod N ]
[ j’ = (i + 2j) \mod N ]
其中,( N ) 是变换的模数,通常是图像的宽度或高度。
特点
- 线性:Arnold变换是一个线性变换,它不改变图像的像素值,只改变像素的位置。
- 混沌性:由于其混沌特性,Arnold变换能够快速地将图像中的像素分散到不同的位置,使得图像的原始结构难以辨认。
- 周期性:Arnold变换在一定次数的迭代后会回到初始状态,这个特性被称为周期性。
逆变换
Arnold变换的逆变换可以通过逆Arnold变换公式实现,其数学表达式如下:
[ i = (2j - i) \mod N ]
[ j = (-i + j) \mod N ]
代码
import numpy as np
import cv2
def logistic_map(x, r=3.99):
return r * x * (1 - x)
def generate_chaos_sequence(size, seed=0.5, r=3.99):
sequence = [seed]
for _ in range(1, size):
sequence.append(logistic_map(sequence[-1], r))
return np.array(sequence)
def chaotic_key_image(img_shape, r=3.99):
size = np.prod(img_shape)
print(img_shape)
chaos_sequence = generate_chaos_sequence(size, seed=np.random.random(), r=r)
key_image = (chaos_sequence.reshape(img_shape) * 255).astype(np.uint8)
return key_image
def pad_image_to_square(image):
h, w, c = image.shape
if h == w:
return image, (h, w)
size = max(h, w)
padded_image = np.zeros((size, size, c), dtype=image.dtype)
padded_image[:h, :w, :] = image
return padded_image, (h, w)
def arnold_cat_map(image, iterations=1):
N = image.shape[0]
result = image.copy()
for _ in range(iterations):
new_result = np.zeros_like(result)
for i in range(N):
for j in range(N):
new_i = (i + j) % N
new_j = (i + 2 * j) % N
new_result[new_i, new_j] = result[i, j]
result = new_result
return result
def inverse_arnold_cat_map(image, iterations=1):
N = image.shape[0]
result = image.copy()
for _ in range(iterations):
new_result = np.zeros_like(result)
for i in range(N):
for j in range(N):
new_i = (2 * i - j) % N
new_j = (-i + j) % N
new_result[new_i, new_j] = result[i, j]
result = new_result
return result
def encrypt_image(image_path, key_path, encrypted_path, r=3.99, iterations=1):
img = cv2.imread(image_path, cv2.IMREAD_COLOR)
# 将图像填充为正方形
padded_img, original_shape = pad_image_to_square(img)
h, w, c = padded_img.shape
# 生成混沌密钥图像
key_img = chaotic_key_image((h, w, c), r=r)
# 使用 Arnold Cat Map 加密
encrypted_img = arnold_cat_map(cv2.bitwise_xor(padded_img, key_img), iterations=iterations)
cv2.imwrite(key_path, key_img)
cv2.imwrite(encrypted_path, encrypted_img)
print("加密完成")
def decrypt_image(encrypted_path, key_path, decrypted_path, original_shape, iterations=1):
encrypted_img = cv2.imread(encrypted_path, cv2.IMREAD_COLOR)
key_img = cv2.imread(key_path, cv2.IMREAD_UNCHANGED)
# 反向 Arnold Cat Map 解密
decrypted_img = cv2.bitwise_xor(inverse_arnold_cat_map(encrypted_img, iterations=iterations), key_img)
# 裁剪回原始形状
h, w = original_shape
decrypted_img = decrypted_img[:h, :w, :]
cv2.imwrite(decrypted_path, decrypted_img)
print("解密完成")
if __name__ == '__main__':
input_path = '0.png'
encrypt_image(input_path, 'key.png', 'encrypted.png', iterations=10)
original_shape = cv2.imread(input_path, cv2.IMREAD_COLOR).shape[:2]
decrypt_image('encrypted.png', 'key.png', 'decrypted.png', original_shape, iterations=10)
结果


二、数字汉字识别
HSV、RGB和BGR是用于在数字图像中表示颜色的三种不同的颜色空间模型。以下是它们之间的主要区别:
-
HSV(Hue, Saturation, Value)颜色空间:
- HSV模型根据颜色的三个基本属性来表示颜色:色调(Hue)、饱和度(Saturation)、亮度(Value)。
- 色调(H)是一个角度值,通常在0°至360°之间,表示颜色的类型(如红色、绿色、蓝色等)。
- 饱和度(S)表示颜色的纯度,即颜色中灰色成分的多少。饱和度越高,颜色越纯。
- 亮度(V)表示颜色的明暗程度,亮度越高,颜色越亮。
- HSV颜色空间更符合人类对颜色的直观感知,因此在图像编辑和颜色分析中非常有用。
-
RGB(Red, Green, Blue)颜色空间:
- RGB颜色空间是最常用的颜色模型,它基于三种原色光的加色混合原理。
- 红色(R)、绿色(G)和蓝色(B)的组合可以产生几乎所有其他颜色。
- 在数字图像中,每个颜色通道可以有0到255的强度值。
- RGB颜色空间适用于显示设备,因为它直接对应于显示设备的工作原理。
-
BGR(Blue, Green, Red)颜色空间:
- BGR颜色空间实际上是RGB颜色空间的一个变体,只是颜色通道的顺序颠倒了。
- 在BGR模型中,首先是蓝色分量,然后是绿色和红色。
- OpenCV库默认使用BGR颜色空间来读取和显示图像,这与其他一些图像处理库使用RGB作为默认颜色空间不同。
代码
import cv2
import numpy as np
import matplotlib.pyplot as plt
import base64
from aip import AipOcr
import time
from PIL import Image, ImageDraw, ImageFont
APP_ID = ' '
API_KEY = 'PZ0GKXJBMwZYuOHWpJ8PVQbt'
SECRET_KEY = '1UOcWxmRTjFCsAycKtSInIz3UayYD4ul'
client = AipOcr(APP_ID, API_KEY, SECRET_KEY)
# 在OpenCV图像上绘制中文文本
def draw_chinese_text(cv2_img, text, position, font_path, font_size=24):
# 将OpenCV图像转换为PIL图像
cv2_img_rgb = cv2.cvtColor(cv2_img, cv2.COLOR_BGR2RGB)
pil_img = Image.fromarray(cv2_img_rgb)
# 创建一个可以在PIL图像上绘制文本的对象
draw = ImageDraw.Draw(pil_img)
# 字体的格式
font = ImageFont.truetype(font_path, font_size)
# 绘制文本
draw.text(position, text, fill=(0, 0, 0), font=font)
# 将PIL图像转换回OpenCV图像
cv2_img_result = cv2.cvtColor(np.array(pil_img), cv2.COLOR_RGB2BGR)
return cv2_img_result
def recognize_content(image_path):
# 读取图片
image = cv2.imread(image_path)
output_image = image.copy()
# 1. 识别指定区域内的数字内容
specified_area = image[200:300, 200:500]
# 使用OCR函数recognize_text进行文字识别
specified_area_text = recognize_text(specified_area)
# 2.定义颜色范围及其对应的绘制颜色
color_bounds = {
'red': (((17, 17, 245), (37, 37, 265)), (0, 0, 255)), # 红色范围及绘制颜色
'green': (((17, 245, 17), (37, 265, 37)), (0, 255, 0)), # 绿色范围及绘制颜色
'blue': (((245, 17, 17), (265, 37, 37)), (255, 0, 0)), # 蓝色范围及绘制颜色
'gold': (((17, 130, 191), (37, 150, 211)), (0, 0, 255)), # 金色范围及绘制颜色
'yellow': (((25, 240, 240), (30, 255, 255)), (0, 255, 255)), # 黄色范围及绘制颜色
'pink': (((205, 180, 240), (215, 200, 255)), (255, 0, 255)), # 粉色范围及绘制颜色
'purple': (((230, 200, 205), (245, 215, 225)), (128, 0, 128)), # 紫色范围及绘制颜色
'brown': (((105, 140, 180), (120, 160, 200)), (42, 42, 165)), # 棕色范围及绘制颜色
}
color_texts = {}
boxes = []
for color, ((lower, upper), draw_color) in color_bounds.items():
mask = cv2.inRange(image, lower, upper)
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
if not contours:
continue
#找到指定区域
x_min = min([cv2.boundingRect(contour)[0] for contour in contours])-10
y_min = min([cv2.boundingRect(contour)[1] for contour in contours])-10
x_max = max([cv2.boundingRect(contour)[0] + cv2.boundingRect(contour)[2] for contour in contours])+10
y_max = max([cv2.boundingRect(contour)[1] + cv2.boundingRect(contour)[3] for contour in contours])+10
boxes.append(((x_min, y_min), (x_max, y_max), draw_color))
# 使用OCR函数recognize_text进行文字识别
color_texts[color] = recognize_text(image[y_min:y_max, x_min:x_max])
for (start_point, end_point, color) in boxes:
cv2.rectangle(output_image, start_point, end_point, color, 2)
# 3.构造要打印的文本
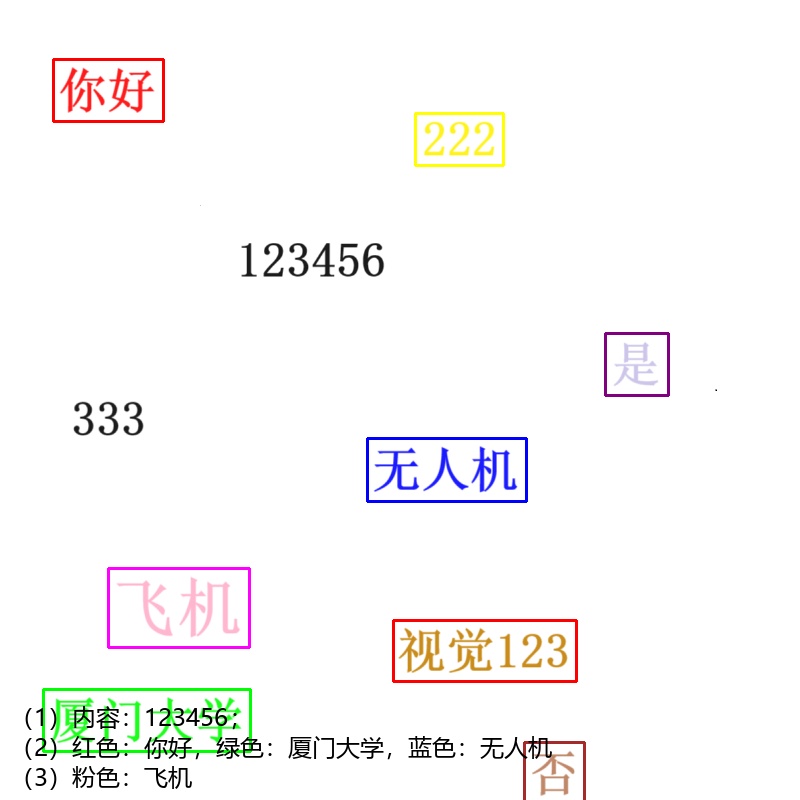
text_to_print = f"(1)内容:{specified_area_text};\n"
text_to_print += f"(2)红色:{color_texts.get('red', '')},绿色:{color_texts.get('green', '')},蓝色:{color_texts.get('blue', '')}\n"
text_to_print += f"(3)粉色:{color_texts.get('pink', '')}"
# 指定字体路径,确保路径正确且字体支持中文
font_path = "msyh.ttc"
# 调用函数在图片上绘制中文文本
output_image = draw_chinese_text(output_image, text_to_print, (10, 700), font_path, 24)
# 显示结果
cv2.imshow("Result", output_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 保存图像
cv2.imwrite("problem2_result_image.jpg", output_image)
def recognize_text(roi):
# 将ROI转换为JPEG格式的字节流
_, buffer = cv2.imencode('.jpg', roi)
# 使用百度OCR进行文字识别,直接传递字节串
text = client.basicAccurate(buffer)
print(text)
time.sleep(0.5)
if text['words_result']==[]:
return ''
else:
return text['words_result'][0]['words']
if __name__ == '__main__':
input_path = '2.png'
recognize_content(input_path)
结果:
要识别的图像:
识别结果:
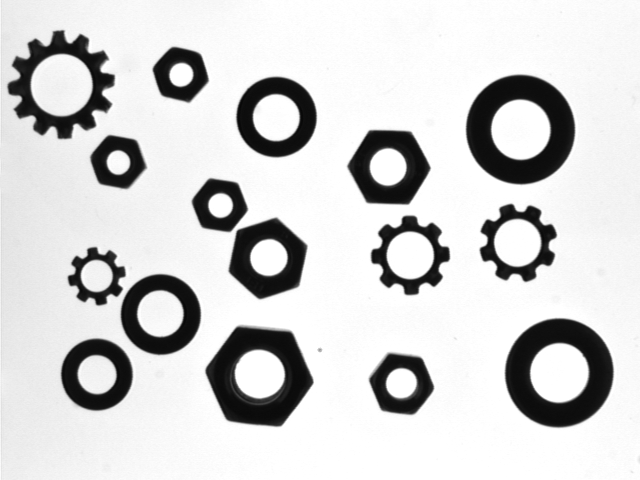
三 物体识别
代码
import cv2
import numpy as np
def read_and_preprocess_image(image_path):
image = cv2.imread(image_path)
if image is None:
raise ValueError("Error: Image not found!")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
return image, blurred
def detect_edges(blurred_image):
edges = cv2.Canny(blurred_image, 50, 150)
return edges
def find_contours(edges):
contours, _ = cv2.findContours(edges.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
return contours
def classify_contours(contours):
nuts = []
washers = []
gears = []
for contour in contours:
area = cv2.contourArea(contour)
if area < 50: # 过滤小噪点
continue
epsilon = 0.01 * cv2.arcLength(contour, True)
approx = cv2.approxPolyDP(contour, epsilon, True)
# 计算轮廓的质心
M = cv2.moments(contour)
if M["m00"] != 0:
cX = int(M["m10"] / M["m00"])
cY = int(M["m01"] / M["m00"])
position = (cX, cY)
x, y, w, h = cv2.boundingRect(contour)
else:
continue
# 根据顶点数和形状特征分类
if len(approx) < 10: # 六角螺母的顶点数小于10
nuts.append((contour, area, position,(x, y, w, h)))
elif 10 <= len(approx) <= 17: # 垫片
washers.append((contour, area, position,(x, y, w, h)))
else:
gears.append((contour, area, position,(x, y, w, h))) # 齿轮最多
return nuts, washers, gears
def sort_and_select(nuts, washers, gears):
nuts.sort(key=lambda x: x[1], reverse=True)
washers.sort(key=lambda x: x[1])
gears.sort(key=lambda x: x[1])
smallest_gear = gears[0] if len(gears) > 0 else None
third_largest_nut = nuts[2] if len(nuts) >= 3 else None
smallest_washer = washers[0] if len(washers) > 0 else None
return smallest_gear, third_largest_nut, smallest_washer
def calculate_gear_module(contour):
# 假设每个齿的距离相等,使用轮廓的近似顶点数来估算齿数
epsilon = 0.03 * cv2.arcLength(contour, True)
approx = cv2.approxPolyDP(contour, epsilon, True)
num_teeth = len(approx)
print("齿轮齿数:", num_teeth)
# 计算轮廓的外接圆直径
(x, y), radius = cv2.minEnclosingCircle(contour)
diameter = 2 * radius
# 估算模数,模数 = 直径 / 齿数
module = diameter / num_teeth
return module, num_teeth
def find_inner_circle(image, sm):
x, y, w, h = sm[3]
x, y, w, h = max(x, 0), max(y, 0), min(w, image.shape[1] - x), min(h, image.shape[0] - y)
mask = image[y:y+h, x:x+w]
# 转换为灰度图像
if len(mask.shape) == 3:
mask = cv2.cvtColor(mask, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(mask, (5, 5), 0)
edges = cv2.Canny(blurred, 100, 200)
contours, _ = cv2.findContours(edges.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 选取最小的轮廓
areas = []
for contour in contours:
area = cv2.contourArea(contour)
if area < 50:
continue
areas.append((area, contour))
areas.sort(key=lambda x: x[0])
# 计算最小的轮廓内接圆半径
if len(areas) > 0:
(x, y), radius = cv2.minEnclosingCircle(areas[0][1])
return int(radius)
def draw_and_label(image, smallest_gear, third_largest_nut, smallest_washer):
# 齿轮
if smallest_gear:
module, num_teeth = calculate_gear_module(smallest_gear[0])
radius_d = module * num_teeth / 2 # 分度圆半径
(x, y), _ = cv2.minEnclosingCircle(smallest_gear[0])
center = (int(x), int(y))
cv2.drawContours(image, [smallest_gear[0]], -1, (255, 0, 0), 2) # 蓝色轮廓
cv2.putText(image, f"Rd = {radius_d:.2f}", center, cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 0, 0), 2)
# 六角螺母
if third_largest_nut:
inner_circle = find_inner_circle(image,third_largest_nut)
if inner_circle is not None:
cx, cy = third_largest_nut[2]
#cv2.circle(image, (cx, cy), inner_circle, (0, 255, 0), 2) # 绿色圆
cv2.putText(image, f"R = {inner_circle}", (cx, cy), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
(x, y), radius = cv2.minEnclosingCircle(third_largest_nut[0])
center = (int(x), int(y))
distances = [cv2.pointPolygonTest(third_largest_nut[0], center, True) for point in third_largest_nut[0]]
radius = min(distances)
cv2.circle(image, center, int(radius), (0, 255, 0), 2) # 绿色圆
cv2.putText(image, f"R = {radius}", center, cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 垫片
if smallest_washer:
cv2.drawContours(image, [smallest_washer[0]], -1, (0, 0, 255), 2) # 红色轮廓
(x, y), outer_radius = cv2.minEnclosingCircle(smallest_washer[0])
outer_center = (int(x), int(y))
inner_radius = find_inner_circle(image,smallest_washer)
if inner_radius is not None:
cx, cy = smallest_washer[2]
# 绘制大圆(圆环的外圈)
cv2.circle(image, outer_center, int(outer_radius), (0, 0, 255), -1) # 使用红色填充
# 绘制小圆(圆环的内圈),使用白色填充以形成圆环效果
cv2.circle(image, outer_center, int(inner_radius), (255, 255, 255), -1) # 背景色为白色
def main(image_path):
image, blurred = read_and_preprocess_image(image_path)
edges = detect_edges(blurred)
contours = find_contours(edges)
nuts, washers, gears = classify_contours(contours)
smallest_gear, third_largest_nut, smallest_washer = sort_and_select(nuts, washers, gears)
draw_and_label(image, smallest_gear, third_largest_nut, smallest_washer)
# 显示和保存结果
cv2.imshow('Result', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
cv2.imwrite('problem3_result_image.png', image)
if __name__ == "__main__":
main('3.png')
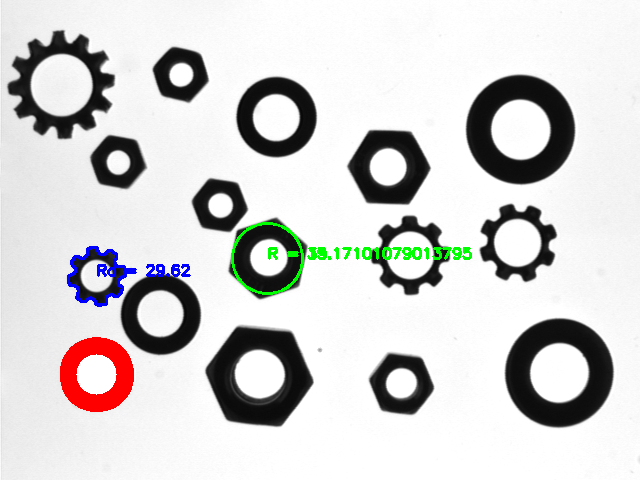
结果
四,物块追踪
代码
import cv2
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import interp1d
import imageio
# 定义颜色范围(在HSV空间中)
color_ranges = {
'red': ((0, 100, 100), (10, 255, 255)),
'green': ((36, 50, 50), (86, 255, 255)),
'blue': ((94, 50, 50), (126, 255, 255))
}
def get_color_range(color):
return color_ranges[color]
def process_video(input_path, color,picture_name):
cap = cv2.VideoCapture(input_path)
if not cap.isOpened():
print("Error: Could not open video.")
return
color_range = get_color_range(color)
points = []
frames = []
while True:
ret, frame = cap.read()
if not ret:
break
# 转换为HSV颜色空间
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 创建掩膜
mask = cv2.inRange(hsv, color_range[0], color_range[1])
# 对掩膜进行一些形态学操作以去噪
mask = cv2.erode(mask, None, iterations=2)
mask = cv2.dilate(mask, None, iterations=2)
# 寻找轮廓
contours, _ = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
best_circle = None
best_circle_radius = 0
for contour in contours:
# 拟合一个最小包围圆
(x, y), radius = cv2.minEnclosingCircle(contour)
center = (int(x), int(y))
radius = int(radius)
# 计算轮廓的面积和圆的面积比较
contour_area = cv2.contourArea(contour)
circle_area = np.pi * (radius ** 2)
# 判断轮廓是否接近圆形
if contour_area / circle_area > 0.8:
if radius > best_circle_radius:
best_circle = (center, radius)
best_circle_radius = radius
if best_circle is not None:
center, radius = best_circle
x, y = center
# 绘制外接正方形
x1, y1 = int(x - radius), int(y - radius)
x2, y2 = int(x + radius), int(y + radius)
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 0, 0), 2)
# 记录圆心坐标
points.append((x, y))
else:
# 如果没有检测到圆形,记录None
points.append(None)
frames.append(frame)
# 显示视频帧
cv2.imshow('Frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 保存为GIF
imageio.mimsave('output.gif', frames, 'GIF', fps=120)
# 处理缺失的点,使用线性插值
x_coords = [p[0] if p is not None else None for p in points]
y_coords = [p[1] if p is not None else None for p in points]
# 使用线性插值填补缺失的点
n = len(points)
valid_points = [i for i in range(n) if points[i] is not None]
if valid_points:
x_interp = interp1d(valid_points, [x_coords[i] for i in valid_points], kind='linear', fill_value='extrapolate')
y_interp = interp1d(valid_points, [y_coords[i] for i in valid_points], kind='linear', fill_value='extrapolate')
x_coords = x_interp(range(n))
y_coords = y_interp(range(n))
# 生成运动轨迹图
plt.figure()
plt.plot(x_coords, y_coords, 'bo-', markersize=5)
plt.gca().invert_yaxis()
plt.xlabel('X Coordinate')
plt.ylabel('Y Coordinate')
plt.title(selected_color+' Motion Path')
plt.savefig(picture_name)
plt.show()
if __name__ == '__main__':
# 输入视频路径
input_video_path = '4.mp4'
# 选择的颜色
selected_color = 'blue'
# 图片名
picture_name = 'motion_path_'+selected_color+'.png'
process_video(input_video_path, selected_color,picture_name)
结果
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » cv实战(一)

发表评论 取消回复