目录
一、概念
寻找棋盘格角点(Checkerboard Corners)是计算机视觉中相机标定(Camera Calibration)过程的重要步骤。
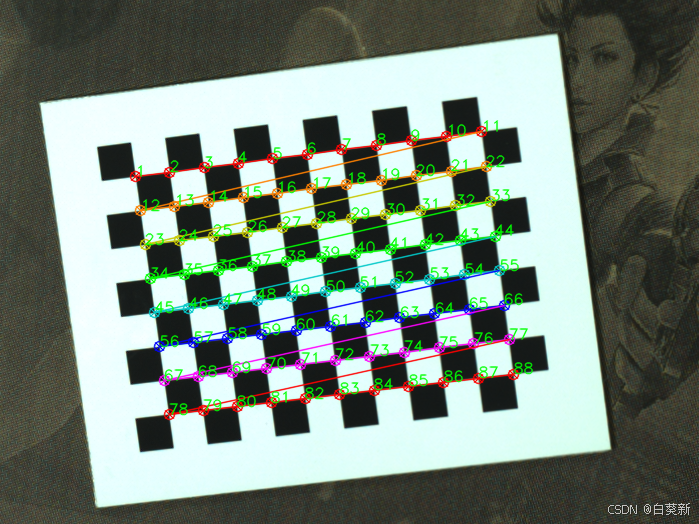
OpenCV 提供了函数 cv2.findChessboardCorners 来检测棋盘格图像中的角点,该函数会从图像的左上角开始扫描,以一定的步长(步长由棋盘格的大小和图像分辨率决定)逐行或逐列地寻找具有棋盘格特征的区域。在找到棋盘格特征后,函数会进一步处理这些区域,确定精确的角点位置,并按照从左到右、从上到下的顺序排列这些角点。这些角点用于标定相机内参和畸变系数。
二、代码
2.1实现步骤
1.图像预处理:
- 将图像转换为灰度图像,因为角点检测在灰度图像上更有效。
- 如果图像有噪声,可以使用滤波器进行平滑处理。
2.角点检测:
- 使用 Harris 角点检测或其他基于梯度的检测方法,找到图像中的所有角点。
- 通过几何约束(如角点之间的固定间距)筛选出棋盘格的角点。
3.亚像素级精度优化:
- 使用 cv2.cornerSubPix 对检测到的角点进行优化,提高角点位置的精度。
2.2完整代码
import cv2
import numpy as np
import glob
# 定义棋盘格的大小(内角点的个数)
chessboard_size = (11, 8) # 11x8的棋盘格
# 图像文件路径
image_files = glob.glob('file_path/*.png') # 替换为实际图像文件路径模式
# 检测并绘制棋盘格角点
for image_file in image_files:
# 读取图像
image = cv2.imread(image_file)
if image is None:
print(f"Image at {image_file} not found or failed to read")
continue
# 将图像转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 寻找棋盘格的角点
ret, corners = cv2.findChessboardCorners(gray_image, chessboard_size, None)
# 如果找到角点,则绘制它们
if ret:
# 优化角点位置
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
corners2 = cv2.cornerSubPix(gray_image, corners, (11, 11), (-1, -1), criteria)
# 绘制角点
cv2.drawChessboardCorners(image, chessboard_size, corners2, ret)
# 为每个角点添加数字标签
for i, corner in enumerate(corners2):
corner = tuple(map(int, corner.ravel())) # 确保corner是一个包含两个整数值的元组
cv2.putText(image, str(i+1), corner, cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1, cv2.LINE_AA)
# 显示结果
cv2.imshow('Chessboard Corners', image)
# 等待用户按下 ESC 键(ASCII 码 27)关闭窗口
while True:
if cv2.waitKey(100) == 27: # 每 0.1 秒检查一次
break
# cv2.waitKey(500) # 等待500毫秒,显示下一张图像
else:
print(f"Chessboard corners not found in image {image_file}")
cv2.destroyAllWindows()三、实现效果
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » OpenCV 寻找棋盘格角点及绘制

发表评论 取消回复