引言
本文是3GPP TR 22.829 V17.1.0技术报告,专注于无人机(UAV)在3GPP系统中的增强支持。文章提出了多个无人机应用场景,分析了相应的能力要求,并建议了新的服务级别要求和关键性能指标(KPIs)。

下载资源:3GPPTR22.829R17EnhancementforUnmannedAerialVehicles资源-CSDN文库
主要内容包括:
- 无人机高清视频直播:支持4K乃至8K视频实时上传,要求低延迟、高可靠性和精确定位,以避免事故。
- 无人机作为空中基站:在灾难监测等场景中,无人机携带基站设备,提供临时覆盖,强调快速部署和灵活配置。
- 无人机命令与控制(C2)通信:定义了直接C2、网络辅助C2等多种模式,强调QoS保障和安全性,以适应不同飞行环境和需求。
- 无人机与地面用户共存:探讨了无人机与增强型移动宽带(eMBB)用户共享网络资源时的干扰最小化问题。
- 自主无人机控制:AI系统通过5G网络控制无人机,对上下行传输提出了高带宽和低延迟要求,并需要高精度定位信息。
- 无人机群管理:支持无人机群在物流等领域的应用,强调群管理和协同作业能力。
- 服务可用性和体验保障:提出通过边缘计算和路径优化,确保无人机通信服务的低延迟和高可靠性。
文章最后总结了无人机通信服务的潜在要求,并建议3GPP制定相关服务规范,以更好地支持无人机生态系统的发展。
5.5 人工智能控制的自主无人机用例
5.5.1 描述
人工智能控制无人机主要通过以下步骤进行:
1)无人机收集实时信息(包括高精度三维地表地形数据、实时图片、实时视频等);
2)这些实时信息通过5G网络传输到人工智能系统;
3)固定路线的飞行器飞行路径由人工智能系统处理,并计算和制定判断指令;
4)这些指令通过5G网络发送到无人机。
在人工智能控制无人机的情况下,需要考虑无人机对无线网络的要求,包括高速上行链路传输和低延迟下行链路传输。
此外,5G网络需要向人工智能系统提供高精度定位信息,以辅助无人机的飞行计算和决策。
5.5.2 先决条件
为无人机场景(如油管巡逻、无人机联合作战)部署了人工智能系统,以实现实时无人机控制。网络运营商为无人机提供网络覆盖,以及无人机与人工智能系统之间的连接。人工智能系统可能位于UTM或其他第三方设备中,这些设备不属于3GPP系统。
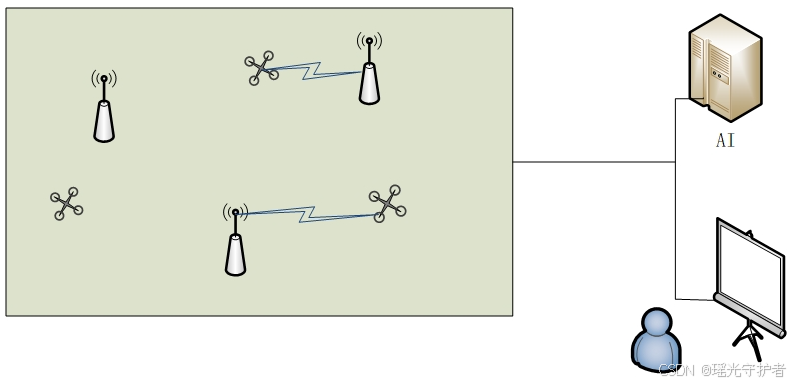
图5.5.2-1:人工智能系统控制的自主无人机的使用
5.5.3 服务流程
- 无人机收集实时信息(包括高精度三维地表地形数据、实时图片、实时视频等);
- 这些实时信息通过5G网络传输到人工智能系统;这将需要上行链路方向的高数据速率(例如,120Mbit/s)。
- 固定路线的飞行器飞行路径由人工智能系统处理,并计算和制定判断指令;
- 这些指令通过5G网络发送到无人机,这需要下行链路方向的低延迟和高可靠性。对传输数据速率没有特别高的要求。
- 5G系统提供无人机的高精度定位,这已在3GPP TS 22.261中指定。此外,5G系统获取飞行无人机的实时位置数据,然后将其发送给可信赖的第三方,例如,用于辅助飞行的人工智能系统。
- 根据监督和控制的要求,无人机系统必须负责以最可用和有效的方式,向最近的民航和相关部门通报任何导致人员重伤或死亡或地面财产重大损失的飞机事故。
5.5.4 后置条件
自主无人机在无人机人工智能系统的控制下完成任务。当终端和人工智能系统的处理时间为10毫秒时,双向网络延迟(即上行链路延迟加上下行链路延迟)应小于40毫秒。有关延迟的计算方式,请参见附件[2]。
5.5.5 现有功能部分或完全覆盖用例功能
5G系统应优化控制平面和/或用户平面的资源使用,以传输需要高数据速率(例如,10 Mbps)和非常低的端到端延迟(例如,1-10 ms)的连续上行链路数据。云应用(如云机器人)在网络中而不是在用户设备中执行计算,这要求系统在上行链路中具有高数据速率和非常低的往返延迟。假设未来会部署高密度的云机器人,5G系统需要针对这种情况优化资源效率。5G系统应能够为服务提供所需的QoS(例如,可靠性、端到端延迟和带宽),并在必要时为该服务支持资源优先级划分。
注1:例如,3GPP定位技术与非3GPP定位技术(如GNSS(北斗、伽利略、格洛纳斯和GPS)、地面信标系统(TBS)、传感器(如气压计、IMU)、基于WLAN/蓝牙的定位)的结合,可以支持提高准确性、可用性、可靠性和/或置信度水平,减少定位服务延迟,增加位置相关数据的更新率,增加覆盖范围(服务区)。
注2:组合可以随时间变化以优化性能,并且可以是同一时期的多种定位技术的组合,也可以是不同时期的多种定位技术的组合。
3GPP系统应使移动网络运营商能够使用以下网络增加发送到UTM的数据:无人机和无人机控制器的基于网络的定位信息。3GPP系统应使无人机系统能够使用无人机和其无人机控制器的实时位置信息更新UTM。对于以下无人机的高带宽充电需求,根据[11]中4.3.1.2用户会话组件的充电原则,有基于QoS差异化的数据(上传或下载)充电的相关要求,包括:根据地区或国家监管要求,5G系统应能够提供高优先级的通信,以应对无人机在紧急情况下的需求,例如,由于设备问题,无人机被迫降落。无人机设备功率不足,且无人机设备可能失去连接。
5.5.6 支持用例所需的潜在新要求
[P.R.5.5-001] 5G系统应支持需要[120]Mbps上行数据速率和[40]ms双向网络延迟(即上行链路延迟加上下行链路延迟)的连续数据传输。
[P.R.5.5-002] 5G系统应能够向可信赖的第三方提供无人机的更高精度位置信息,延迟小于[10]ms。
往期内容:
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(一)-3GPP TR 22.829 V17.1.0技
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(一)-3GPP TR 22.829 V17.1.0技
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(二)-支持高分辨率视频直播应用-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(三)-机上无线电接入节点无人机-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(四)-无人机系统(UAS)命令与控制(C2)通信用例-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(五)-同时支持无人机和eMBB用户数据传输的用例-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(六)-人工智能控制的自主无人机用例-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(七)-通过无人机实现无线接入的独立部署-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(八)-通过无人机进行无线接入-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(九)-无人机服务区分离-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(十)-服务体验保证的用例-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(十一)-无人机服务可用性用例需求-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(十二)-无人机群在物流中的应用-CSDN博客
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 【学习笔记】无人机(UAV)在3GPP系统中的增强支持(六)-人工智能控制的自主无人机用例

发表评论 取消回复