i.MX8MM处理器采用了先进的14LPCFinFET工艺,提供更快的速度和更高的电源效率;四核Cortex-A53,单核Cortex-M4,多达五个内核 ,主频高达1.8GHz,2G DDR4内存、8G EMMC存储。千兆工业级以太网、MIPI-DSI、USB HOST、WIFI/BT、4G模块、CAN、RS485等接口一应俱全。H264、VP8视频硬编码,H.264、H.265、VP8、VP9视频硬解码,并提供相关历程,支持8路PDM接口、5路SAI接口、2路Speaker。系统支持Android9.0(支持获取root限)Linux4.14.78+Qt5.10.1、Yocto、Ubuntu20、Debian9系统。适用于智能充电桩,物联网,工业控制,医疗,智能交通等,可用于任何通用工业和物联网应用、
【公众号】迅为电子
【粉丝群】258811263(加群获取驱动文档+例程)
第六十二章 定时器按键消抖实验
本章导读
在前面的实验中都用到了按键,用到按键就要处理因为机械结构带来的按键抖动问题,也就是按键消抖。如果直接用延时函数来实现消抖会浪费 CPU 性能,因为在延时函数里面 CPU 什么都做不了。如果按键使用中断的话更不能在中断里面使用延时函数,因为中断服务函数要快进快出!本章我们学习如何使用定时器来实现按键消抖,使用定时器既可以实现按键消抖,而且也不会浪费CPU 性能,这个也是 Linux 驱动里面按键消抖的做法。
62.1章节讲解了定时器按键消抖原理
62.2章节以实验的形式,实现定时器按键消抖。
本章内容对应视频讲解链接(在线观看):
按键消抖实验 → https://www.bilibili.com/video/BV1Vy4y1B7ta?p=41
程序源码在网盘资料“iTOP-i.MX8MM开发板\02-i.MX8MM开发板网盘资料汇总(不含光盘内容)\嵌入式Linux开发指南(iTOP-i.MX8MM)手册配套资料\2.驱动程序例程\019-定时器按键消抖实验\”路径下。
62.1 定时器按键消抖简介
理想型的按键电压变化过程如图所示:
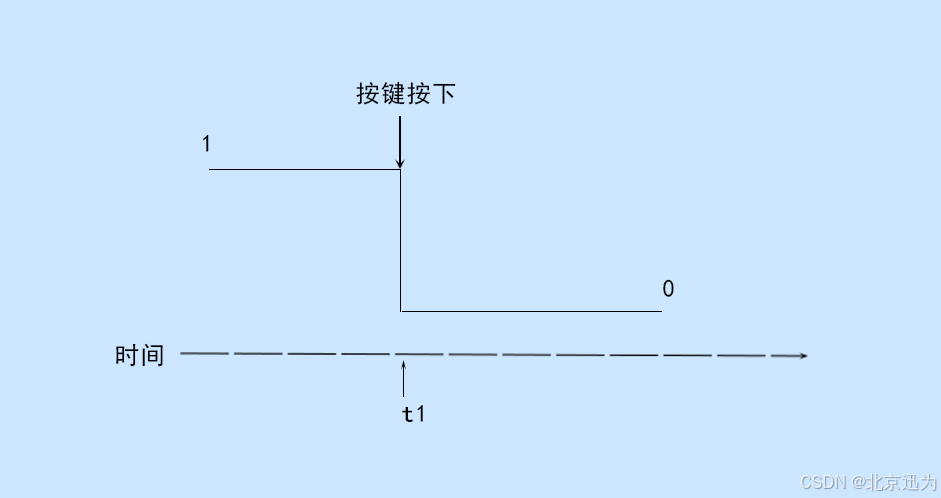
在上图中,按键没有按下的时候按键值为 1,当按键在 t1 时刻按键被按下以后按键值就变为 0,这是最理想的状态。但是实际的按键是机械结构,加上刚按下去的一瞬间人手可能也有抖动,实际的按键电压变化过程如下图所示:
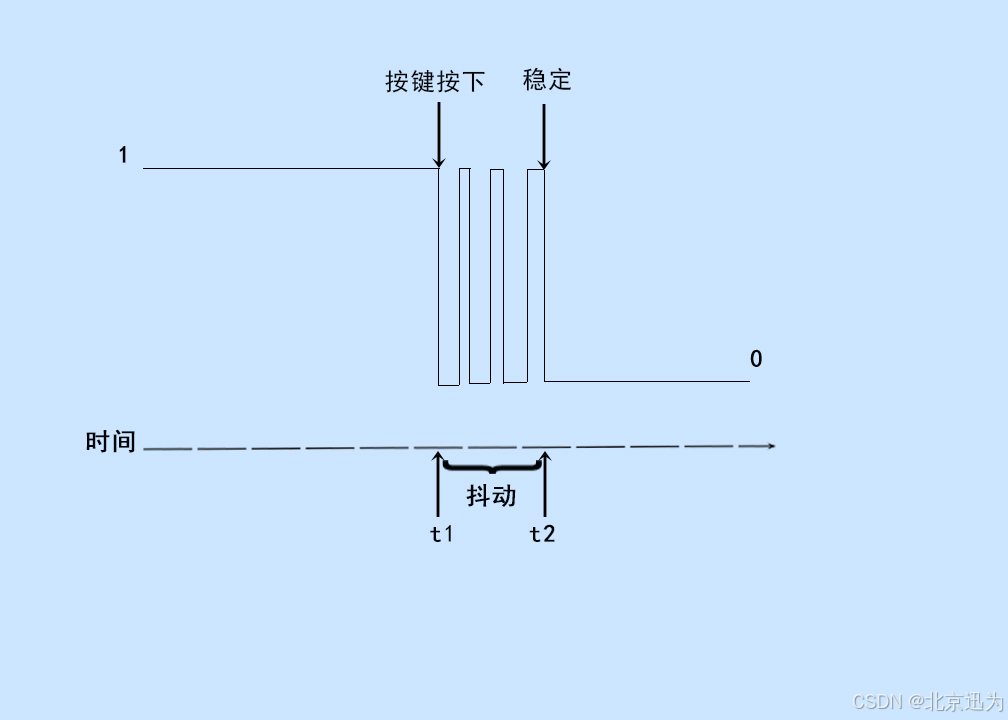
在上图中,t1 时刻按键被按下,但是由于抖动的原因,直到 t2 时刻才稳定下来,t1 到t2 这段时间就是抖动。一般这段时间就是十几 ms 左右,从上图中可以看出在抖动期间会有多次触发,如果不消除这段抖动的话软件就会误判,本来按键就按下了一次,结果软件读取IO 值发现电平多次跳变以为按下了多次。所以我们需要跳过这段抖动时间再去读取按键的 IO值,也就是至少要在 t2 时刻以后再去读 IO 值。因此,
我们可以借助定时器来实现消抖,按键采用中断驱动方式,当按键按下以后触发按键中断,在按键中断中开启一个定时器,定时周期为 10ms,当定时时间到了以后就会触发定时器中断,最后在定时器中断处理函数中读取按键的值,如果按键值还是按下状态那就表示这是一次有效的按键。定时器按键消抖如下图所示:
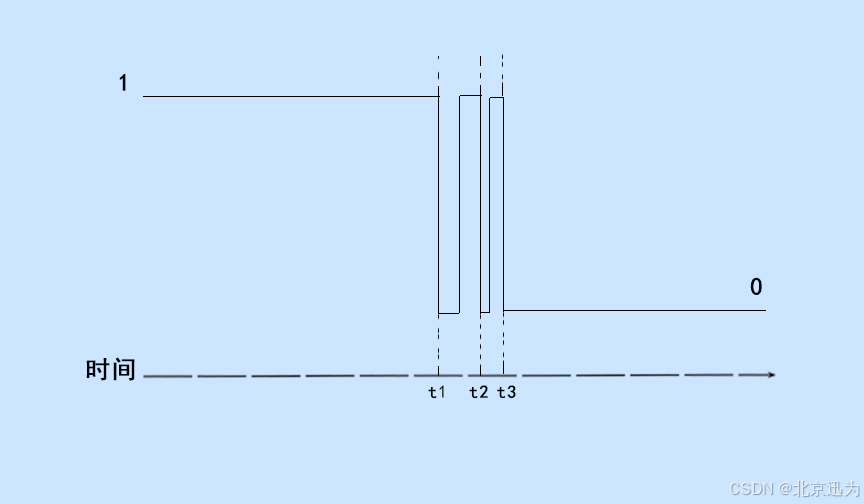
在上图中t1~t3 这一段时间就是按键抖动,是需要消除的。设置按键为下降沿触发,因此会在 t1、t2 和 t3 这三个时刻会触发按键中断,每次进入中断处理函数都会重新开启定时器中断,所以会在 t1、t2 和 t3 这三个时刻开器定时器中断。但是 t1~t2 和 t2~t3 这两个时间段是小于我们设置的定时器中断周期(也就是消抖时间,比如 10ms),所以虽然 t1 开启了定时器,但是定时器定时时间还没到呢 t2 时刻就重置了定时器,最终只有 t3 时刻开启的定时器能完整的完成整个定时周期并触发中断,我们就可以在中断处理函数里面做按键处理了,这就是定时器实现按键防抖的原理,Linux 里面的按键驱动用的就是这个原理!
62.2 定时器按键消抖实验
我们在Ubuntu的/home/topeet/imx8mm/19目录下新建driver.c文件,将Makefile,build.sh拷贝到同级目录下,完整代码如下所示:
/*
* @Author:topeet
* @Description:定时器按键消抖
*/
#include <linux/init.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/gpio.h>
#include <linux/of_gpio.h>
#include <linux/interrupt.h>
#include <linux/of_irq.h>
#include <linux/timer.h>
//need by strerror()
//#include <string.h>
// 声明时间处理函数
static void timer_function(unsigned long data);
// 该宏会静态创建一个名叫 timer_name 内核定时器,
// 并初始化其 function, expires, name 和 base 字段。
DEFINE_TIMER(test_timer, timer_function, 0, 0);
//定义结构体表示我们的节点
struct device_node *test_device_node;
struct property *test_node_property;
//要申请的中断号
int irq;
//GPIO 编号
int gpio_nu;
int a=0;
/**
* @description:超时处理函数
* @param {*}
* @return {*}
*/
static void timer_function(unsigned long data)
{
//如果超时则打印信息
printk(" This is timer_function \n");
a=0;
//mod_timer(&test_timer,jiffies + 1*HZ);
}
//中断处理函数
irqreturn_t test_key(int irq, void *args)
{
if(a==0)
{
a=1;
printk("test_key\n");
test_timer.expires = jiffies + msecs_to_jiffies(20);
//定时器注册到内核里面
add_timer(&test_timer);
}
return IRQ_HANDLED;
}
/**
* @brief led_probe : 与设备信息层(设备树)匹配成功后自动执行此函数,
* @param inode : 文件索引
* @param file : 文件
* @return 成功返回 0
*/
int led_probe(struct platform_device *pdev)
{
int ret = 0;
printk("led_probe\n");
//of_find_node_by_path函数通过路径查找节点,/test_key是设备树下的节点路径
test_device_node = of_find_node_by_path("/test");
if (test_device_node == NULL)
{
printk("of_find_node_by_path is error \n");
return -1;
}
//of_get_named_gpio函数获取 GPIO 编号
gpio_nu = of_get_named_gpio(test_device_node, "gpios", 0);
if (gpio_nu < 0)
{
printk("of_get_namd_gpio is error \n");
return -1;
}
// 设置GPIO为输入模式
gpio_direction_input(gpio_nu);
// 获取中断号
irq = irq_of_parse_and_map(test_device_node, 0);
//gic_irq_domain_translate(test_device_node, 0);
printk("irq is %d \n", irq);
/*申请中断,irq:中断号名字
test_key:中断处理函数
IRQF_TRIGGER_RISING:中断标志,意为上升沿触发
"test_key":中断的名字
*/
ret = request_irq(irq, test_key, IRQ_TYPE_EDGE_BOTH, "test_key", NULL);
if (ret < 0)
{
printk("request_irq is error :%d\n",ret);
return -1;
}
return 0;
}
int led_remove(struct platform_device *pdev)
{
printk("led_remove\n");
return 0;
}
const struct platform_device_id led_idtable = {
.name = "keys",
};
const struct of_device_id of_match_table_test[] = {
{.compatible = "keys"},
{},
};
struct platform_driver led_driver = {
//3. 在led_driver结构体中完成了led_probe和led_remove
.probe = led_probe,
.remove = led_remove,
.driver = {
.owner = THIS_MODULE,
.name = "led_test",
.of_match_table = of_match_table_test},
//4 .id_table的优先级要比driver.name的优先级要高,优先与.id_table进行匹配
.id_table = &led_idtable};
static int led_driver_init(void)
{
//1.我们看驱动文件要从init函数开始看
int ret = 0;
//2. 在init函数里面注册了platform_driver
ret = platform_driver_register(&led_driver);
if (ret < 0)
{
printk("platform_driver_register error \n");
}
printk("platform_driver_register ok \n");
return 0;
}
static void led_driver_exit(void)
{
del_timer(&test_timer);
free_irq(irq, NULL);
platform_driver_unregister(&led_driver);
printk("gooodbye! \n");
}
module_init(led_driver_init);
module_exit(led_driver_exit);
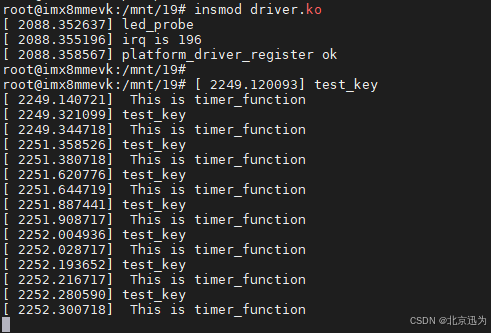
MODULE_LICENSE("GPL");我们将刚刚编写的驱动代码编译为驱动模块,如下图所示:
并且加载驱动模块,如下图所示,我们按下开发板上面的音量+按键,打印" This is timer_function \n",说明进入了超时服务函数。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 【北京迅为】《i.MX8MM嵌入式Linux开发指南》-第三篇 嵌入式Linux驱动开发篇-第六十二章 定时器按键消抖实验

发表评论 取消回复