目录
Open3D点云算法汇总及实战案例汇总的目录地址:
Open3D点云算法与点云深度学习案例汇总(长期更新)-CSDN博客
一、概述
1.1原理
在Open3D中,计算点云的质心(中心点)是一个常见的操作。质心是点云所有点的平均位置,可以通过简单地计算点云中所有点的平均值来得到。点云质心的计算是点云处理中一个基本且重要的步骤。质心不仅是点云的几何中心,还在许多实际应用中起着重要作用,包括点云对齐、归一化、重心调整、特征提取、可视化和机器人导航等。通过计算质心,可以更有效地处理和分析点云数据,提升点云处理任务的精度和效率。
1.2实现步骤
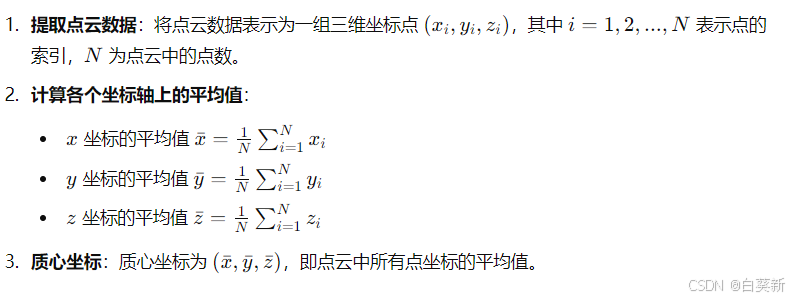
二、代码实现
2.1关键函数
# 计算质心
centroid = np.mean(points, axis=0)
print("质心坐标:", centroid)2.2完整代码
import open3d as o3d
import numpy as np
# 读取点云数据
pcd = o3d.io.read_point_cloud("path_to_your_point_cloud.pcd")
# 提取点云数据
points = np.asarray(pcd.points)
# 计算质心
centroid = np.mean(points, axis=0)
print("质心坐标:", centroid)
# 在质心位置添加一个小的坐标系以进行可视化
coordinate_frame = o3d.geometry.TriangleMesh.create_coordinate_frame(size=0.1)
coordinate_frame.translate(centroid)
# 可视化点云和质心坐标系
o3d.visualization.draw_geometries([pcd, coordinate_frame], window_name="Point Cloud with Centroid")
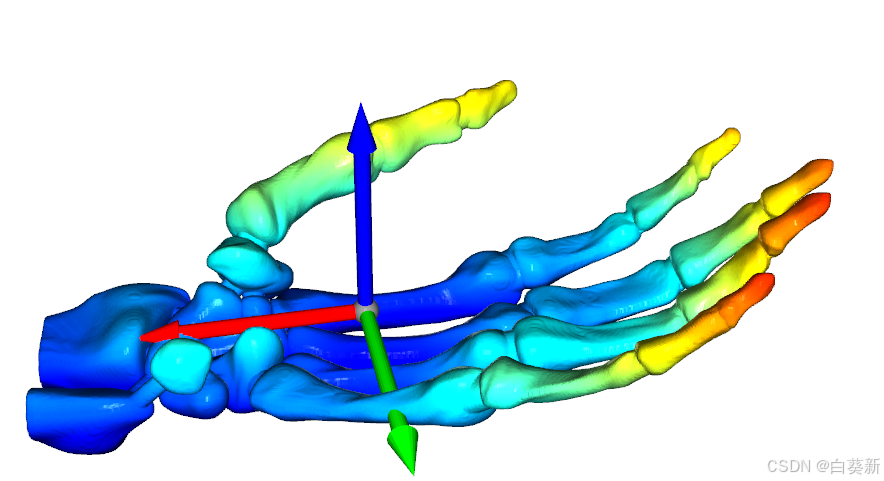
三、实现效果
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » Open3D 计算点云质心

发表评论 取消回复