在上一节 cloud compare二次插件化功能开发详细步骤(一)
我们已经完成了 具体开发前的准备工作,包括 各级CMakelists.txt 的设置,相关内容的修改,并已成功编译
如需整个插件项目,编译后的dll,或其他帮助,欢迎留言、私信或加群【群号:392784757】
这一节针对我们的qPCA插件,引入进阶内容,包括第三方库引入、设置用户输入参数界面以及具体逻辑的编写
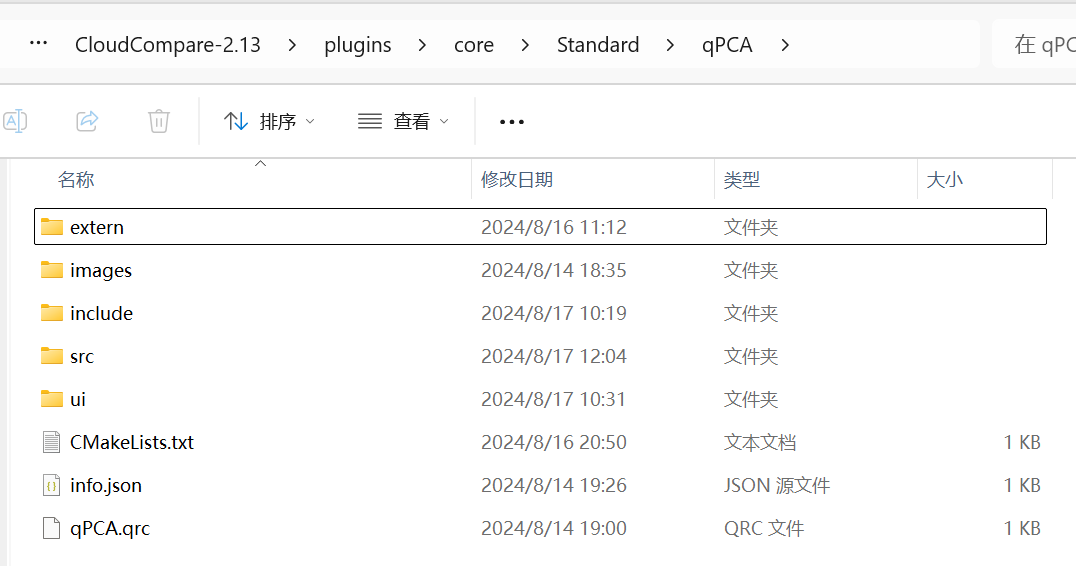
最终整体的qPCA插件目录结构如下
第三方库引入
由于cc 处理的主要是点云、网格数据,较少涉及到大型矩阵的求解,而PCA分析需要去计算矩阵,在这里我们要引入第三方库Eigen 帮助完成
Eigen 是一个轻量级的 C++ 数学库,主要用于矩阵和线性代数运算。它的一个优势就是它是头文件库,不需要编译成库文件,引入难度也会低一点
在这里使用的是 Eigen 3.4 版本 官方网站 https://eigen.tuxfamily.org/index.php?title=Main_Page
下载解压后在 extern 目录下
具体路径 形式 extern\eigen3\Eigen\**
然后修改 当前qPCA 插件的 最高CMakeLists.txt
添加内容
include_directories("${CMAKE_CURRENT_LIST_DIR}/extern/eigen3") # 设置包含目录
我在这里设置后发现 并不能成功引入
同时还在 include 文件夹下的 CMakeLists.txt 添加
include_directories("${CMAKE_CURRENT_LIST_DIR}/../extern/eigen3")
成功引入
【最终版本 qPCA 插件的 最高CMakeLists.txt 如下】
# CloudCompare example for standard plugins
option( PLUGIN_qPCA "Install PCA plugin" OFF )
if ( PLUGIN_qPCA )
project( QPCA_PLUGIN )
AddPlugin( NAME ${PROJECT_NAME} )
add_subdirectory( include )
add_subdirectory( src )
add_subdirectory( ui )
include_directories("${CMAKE_CURRENT_LIST_DIR}/extern/eigen3")
# set dependencies to necessary libraries
# target_link_libraries( ${PROJECT_NAME} LIB1 )
endif()
【最终版本 include 文件夹下的 CMakeLists.txt 如下】
include_directories("${CMAKE_CURRENT_LIST_DIR}/../extern/eigen3")
target_sources( ${PROJECT_NAME}
PRIVATE
#${CMAKE_CURRENT_LIST_DIR}/ActionA.h
${CMAKE_CURRENT_LIST_DIR}/qPCA.h
${CMAKE_CURRENT_LIST_DIR}/ccPCADlg.h
)
target_include_directories( ${PROJECT_NAME}
PRIVATE
${CMAKE_CURRENT_SOURCE_DIR}
)
插件基于ExamplePlugin而来,其中的 ActionA.h,ActionA.cpp 并未删除 相关内容被注释,不会引入到我们的插件中
然后 cmake 重新构建项目,测试是否引入成功
在qPCA.h中添加
#include <Eigen/Core>
在qPCA.cpp 中添加 相关头文件,看能否找到
#include <Eigen/Core>
#include <Eigen/Eigenvalues>
#include <Eigen/Dense>
在 vs 中 ctrl 然后 点击引入的头文件,引入成功 可以看到 具体的头文件,否则就未引入成功
ui 用户参数设置接收框
针对qPCA 插件我设置的用户参数是主方向和哪个坐标轴对齐,界面展示如下
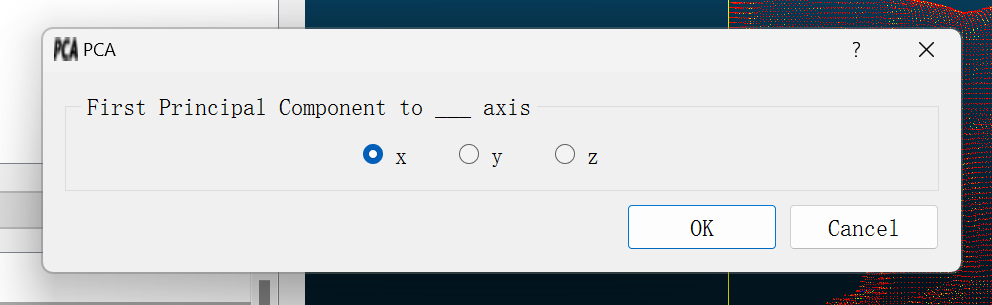
可以对齐到不同的轴上,在最开始开发时,可以不引入用户参数接收框,程序基本完成后,再引入ui,提升用户体验
按照真实的开发情况,这一小节应放在最后,但放在中间行文也可以
ui的设计
【略】
根据自己的插件设置不同的布局和对应输入组件,可基于CC已有的进行修改
结束后应由有一个ui文件,在本文是 ui/pcaDlg.ui
ui文件夹下 cmakelists.txt 最终版如下
target_sources( ${PROJECT_NAME}
PRIVATE
${CMAKE_CURRENT_LIST_DIR}/pcaDlg.ui
)
其实也可以由代码来写界面,不需要.ui ,也就是.ui编译后的 ui_xxx.h 头文件,这里是qt的知识了
ui 代码层面引入
新建 include/ccPCADlg.h,src/ccPCADlg.cpp
cmakelists.txt 修改
qPCA 插件的 最高CMakeLists.txt 已在上文摆出
include 文件下 cmakelists.txt 已在上文摆出
src 文件夹下 cmakelists.txt 最终版如下
target_sources( ${PROJECT_NAME}
PRIVATE
# ${CMAKE_CURRENT_LIST_DIR}/ActionA.cpp
${CMAKE_CURRENT_LIST_DIR}/qPCA.cpp
${CMAKE_CURRENT_LIST_DIR}/ccPCADlg.cpp
)
ccPCADlg.h
#ifndef CC_PCA_DLG_HEADER
#define CC_PCA_DLG_HEADER
#include "ui_pcaDlg.h"
class ccPCADlg : public QDialog, public Ui::PCADialog
{
Q_OBJECT
public:
//! Default constructor
explicit ccPCADlg(QWidget* parent = nullptr);
protected:
//! Saves (temporarily) the dialog parameters on acceptation
void saveSettings();
};
#endif
这里ccPCADlg 会继承 ui文件编译后ui_pcaDlg.h 中的 Ui::PCADialog,声明的ccPCADlg可以拿到界面上的所有组件,进而可以获取用户设置的值
ccPCADlg.cpp
#include "ccPCADlg.h"
#include <QButtonGroup>
static bool axis_x_checeked = true;
static bool axis_y_checeked = false;
static bool axis_z_checeked = false;
ccPCADlg::ccPCADlg(QWidget* parent)
: QDialog(parent)
, Ui::PCADialog()
{
setupUi(this);
connect(buttonBox, &QDialogButtonBox::accepted, this, &ccPCADlg::saveSettings);
// 创建一个 QButtonGroup 逻辑上保证只有一个被选中
QButtonGroup* buttonGroup = new QButtonGroup(this);
buttonGroup->addButton(radioButton);
buttonGroup->addButton(radioButton_2);
buttonGroup->addButton(radioButton_3);
radioButton->setChecked(true); // default x
}
void ccPCADlg::saveSettings()
{
axis_x_checeked = radioButton->isChecked();
axis_y_checeked = radioButton_2->isChecked();
axis_z_checeked = radioButton_3->isChecked();
}
主程序逻辑
qPCA.h
#pragma once
#include "ccStdPluginInterface.h"
#include <Eigen/Core>
class qPCA : public QObject, public ccStdPluginInterface
{
Q_OBJECT
Q_INTERFACES(ccPluginInterface ccStdPluginInterface)
Q_PLUGIN_METADATA(IID "cccorp.cloudcompare.plugin.qPCA" FILE "../info.json")
public:
explicit qPCA(QObject *parent = nullptr);
~qPCA() override = default;
// Inherited from ccStdPluginInterface
void onNewSelection(const ccHObject::Container &selectedEntities) override;
QList<QAction *> getActions() override;
ccHObject* executePCA(ccPointCloud* ccPC,
Eigen::Vector3f& eigenValuesPCA,
Eigen::Matrix3f& eigenVectorsPCA,
Eigen::Vector3f& pcaCentroid,
bool silent);
protected:
void doAction();
private:
QAction *m_action;
};
其中
ccHObject* executePCA(ccPointCloud* ccPC,
Eigen::Vector3f& eigenValuesPCA,
Eigen::Matrix3f& eigenVectorsPCA,
Eigen::Vector3f& pcaCentroid,
bool silent);
是我们的核心函数
qPCA.cpp
一一实现对应的函数
声明用于插件的cc提供的程序接口,暴露出来给后面函数使用
static ccMainAppInterface* s_app = nullptr;
构造函数
qPCA::qPCA( QObject *parent )
: QObject( parent )
, ccStdPluginInterface( ":/CC/plugin/qPCA/info.json" )
, m_action( nullptr )
{
s_app = m_app; // m_app 继承自 ccStdPluginInterface 接口 也是 ccMainAppInterface*
}
onNewSelection()
void qPCA::onNewSelection( const ccHObject::Container &selectedEntities )
{
if (m_action)
m_action->setEnabled(selectedEntities.size() == 1 && selectedEntities[0]->isA(CC_TYPES::POINT_CLOUD));
}
保证选到了一个实体,且是点云
getActions()
QList<QAction *> qPCA::getActions()
{
// default action (if it has not been already created, this is the moment to do it)
if ( !m_action )
{
// Here we use the default plugin name, description, and icon,
// but each action should have its own.
m_action = new QAction( getName(), this );
m_action->setToolTip( getDescription() );
m_action->setIcon( getIcon() );
// Connect appropriate signal
connect( m_action, &QAction::triggered, this, &qPCA::doAction);
}
return { m_action };
}
我们只有一个 action ,保持不变;
如需添加更多子功能action啥的,需要在这里链接对应信号和槽函数
doAction()
执行核心逻辑前的检查和准备,包括 实体检查和判断,获取用户设置值,实体类型转换为点云,核心函数的准备
static bool axis_x_checked = true;
static bool axis_y_checked = false;
static bool axis_z_checked = false;
void qPCA::doAction()
{
assert(m_app);
if (!m_app)
return;
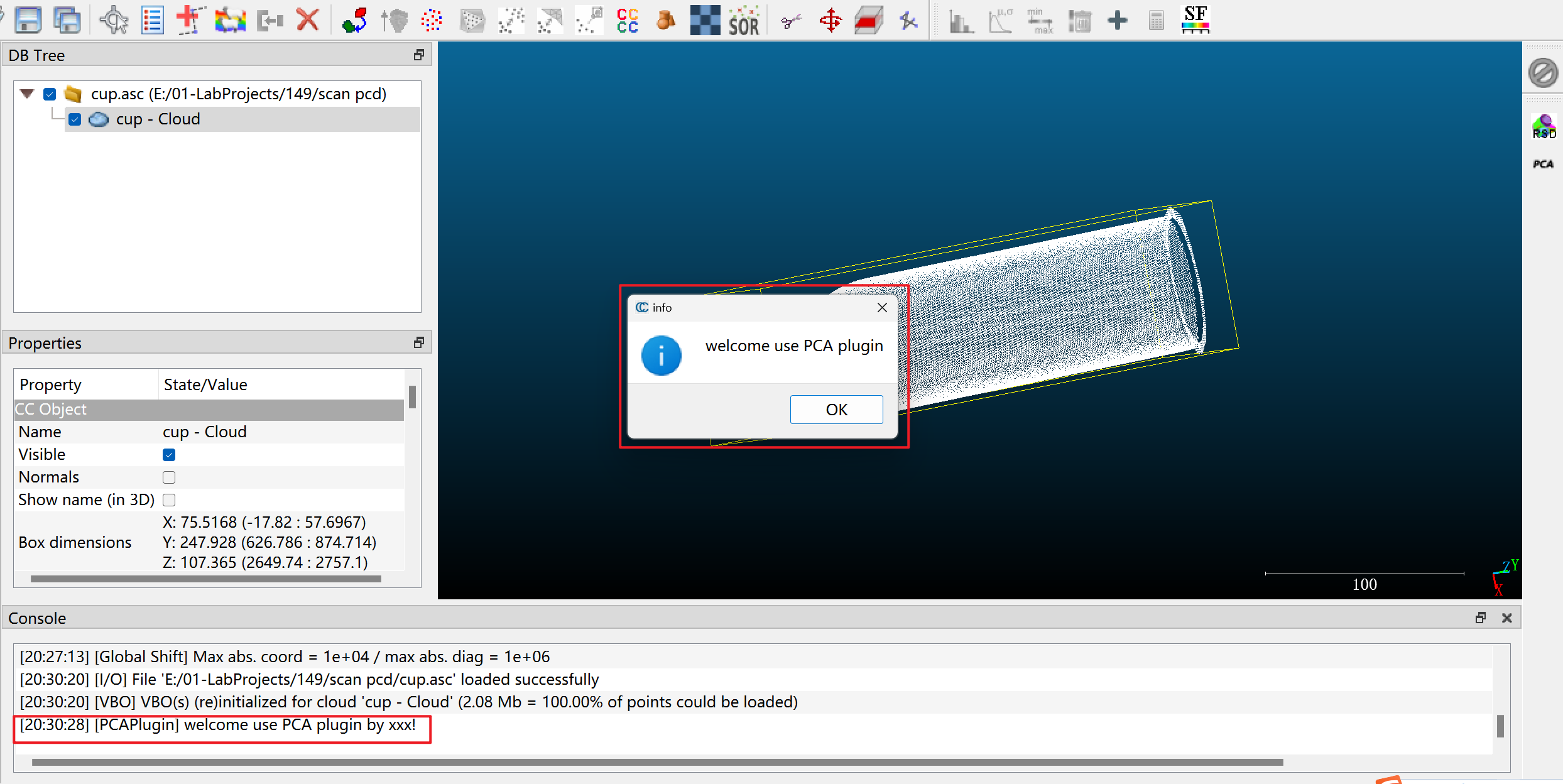
m_app->dispToConsole("[qPCA] welcome use PCA plugin by xxx!", ccMainAppInterface::STD_CONSOLE_MESSAGE);
QMessageBox::information(nullptr, "info", "welcome use PCA plugin");
const ccHObject::Container& selectedEntities = m_app->getSelectedEntities();
size_t selNum = selectedEntities.size();
if (selNum != 1)
{
ccLog::Error("[qPCA] Select only one cloud!");
return;
}
ccHObject* ent = selectedEntities[0];
assert(ent);
if (!ent || !ent->isA(CC_TYPES::POINT_CLOUD))
{
ccLog::Error("[qPCA] Select a real point cloud!");
return;
}
ccPointCloud* pc = static_cast<ccPointCloud*>(ent);
// input cloud
CCVector3 bbMin, bbMax;
pc->getBoundingBox(bbMin, bbMax);
/*CCVector3 diff = bbMax - bbMin;
float scale = std::max(std::max(diff[0], diff[1]), diff[2]);*/
ccPCADlg pcaDlg(m_app->getMainWindow());
if (!pcaDlg.exec())
{
return;
}
axis_x_checked = pcaDlg.radioButton->isChecked();
axis_y_checked = pcaDlg.radioButton_2->isChecked();
axis_z_checked = pcaDlg.radioButton_3->isChecked();
Eigen::Vector3f eigenValuesPCA;
Eigen::Matrix3f eigenVectorsPCA;
Eigen::Vector3f pcaCentroid;
ccHObject* group = executePCA(pc,eigenValuesPCA,eigenVectorsPCA, pcaCentroid,false);
if (group)
{
m_app->addToDB(group);
m_app->refreshAll();
}
}
executePCA()
主要逻辑为
计算点云中心—> 计算点云协方差矩阵 —> Eigen 求解奇异值和奇异向量 —> 构建旋转矩阵 —》 旋转变换到标准坐标系,主方向 与根据用户选择的轴 对齐,默认x轴
ccHObject* qPCA::executePCA(ccPointCloud* ccPC,
Eigen::Vector3f& eigenValuesPCA,
Eigen::Matrix3f& eigenVectorsPCA,
Eigen::Vector3f& pcaCentroid,
bool silent)
{
ccHObject* group = nullptr;
const CCVector3d& globalShift = ccPC->getGlobalShift();
double globalScale = ccPC->getGlobalScale();
auto toEigen = [](const CCVector3* vec) {
return Eigen::Vector3f(vec->x, vec->y, vec->z);
};
pcaCentroid.setZero();
for (unsigned i = 0; i < ccPC->size(); ++i)
{
const CCVector3* point = ccPC->getPoint(i);
Eigen::Vector3f eigenPoint(point->x, point->y, point->z);
pcaCentroid += eigenPoint;
}
pcaCentroid /= static_cast<float>(ccPC->size());
Eigen::Matrix3f covarianceMatrix = Eigen::Matrix3f::Zero();
for (unsigned i = 0; i < ccPC->size(); ++i)
{
Eigen::Vector3f diff = (toEigen(ccPC->getPoint(i))) - pcaCentroid;
covarianceMatrix += diff * diff.transpose();
}
covarianceMatrix /= static_cast<float>(ccPC->size());
// 进行 PCA:求解特征值和特征向量
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3f> solver(covarianceMatrix);
eigenValuesPCA = solver.eigenvalues(); // 返回特征值
eigenVectorsPCA = solver.eigenvectors(); // 返回特征向量
// log
Eigen::IOFormat CleanFmt(4, 0, ", ", "\n", "[", "]");
std::stringstream vectorStream, matrixStream;
vectorStream << pcaCentroid.format(CleanFmt);
m_app->dispToConsole("[qPCA] pca center", ccMainAppInterface::STD_CONSOLE_MESSAGE);
m_app->dispToConsole(QString::fromStdString(vectorStream.str()), ccMainAppInterface::STD_CONSOLE_MESSAGE);
vectorStream.str("");
m_app->dispToConsole("[qPCA] eigen values", ccMainAppInterface::STD_CONSOLE_MESSAGE);
vectorStream << eigenValuesPCA.format(CleanFmt);
matrixStream << eigenVectorsPCA.format(CleanFmt);
m_app->dispToConsole(QString::fromStdString(vectorStream.str()), ccMainAppInterface::STD_CONSOLE_MESSAGE);
m_app->dispToConsole("[qPCA] eigen vectors sorted by eigen value in descending order", ccMainAppInterface::STD_CONSOLE_MESSAGE);
m_app->dispToConsole(QString::fromStdString(matrixStream.str()), ccMainAppInterface::STD_CONSOLE_MESSAGE);
//m_app->forceConsoleDisplay();
// 将点云主方向转换到 x y z 轴上
char axis = axis_y_checked ? 'y' : (axis_z_checked ? 'z' : 'x');
m_app->dispToConsole(QString::fromStdString("[qPCA] frist component 2 axis "+std::tolower(axis)), ccMainAppInterface::STD_CONSOLE_MESSAGE);
//char axis = 'x'; //通过对话框获取 默认
Eigen::Matrix4f rotationMatrix = Eigen::Matrix4f::Identity();
Eigen::Matrix3f tmp;
switch (axis)
{
case 'x':
rotationMatrix.block<3, 3>(0, 0) = eigenVectorsPCA.transpose(); // x y z
break;
case 'y':
tmp = eigenVectorsPCA;
tmp.col(0).swap(tmp.col(1));
rotationMatrix.block<3, 3>(0, 0) = tmp.transpose(); // y x z
break;
case 'z':
tmp = eigenVectorsPCA;
tmp.col(0).swap(tmp.col(2));
rotationMatrix.block<3, 3>(0, 0) = tmp.transpose(); // z x y
break;
default:
break;
}
matrixStream.str("");
matrixStream << rotationMatrix.format(CleanFmt);
m_app->dispToConsole(QString::fromStdString(matrixStream.str()), ccMainAppInterface::STD_CONSOLE_MESSAGE);
rotationMatrix.block<3, 1>(0, 3) = -1.0f * ((axis_x_checked ? eigenVectorsPCA.transpose() : tmp.transpose()) * pcaCentroid);
matrixStream.str("");
matrixStream << rotationMatrix.format(CleanFmt);
m_app->dispToConsole(QString::fromStdString(matrixStream.str()), ccMainAppInterface::STD_CONSOLE_MESSAGE);
ccPointCloud* firstComponent = new ccPointCloud(
QString("first component - projecting to (%1) plane ").arg((axis_y_checked ? "xz" : (axis_z_checked ? "xy" : "yz")))
);
ccPointCloud* secondComponent = new ccPointCloud(
QString("second component - projecting to (%1) plane ").arg((axis_y_checked ? "yz" : (axis_z_checked ? "zy" : "xz")))
);
ccPointCloud* thirdComponent = new ccPointCloud(
QString("third component - projecting to (%1) plane ").arg((axis_y_checked ? "yx" : (axis_z_checked ? "zx" : "xy")))
); // 主成分
ccPointCloud* stdAxisCloud = new ccPointCloud("2stdAxisCloud");
if (!firstComponent->reserve(static_cast<unsigned>(ccPC->size())))
{
ccLog::Error("[qPCA] Not enough memory!");
delete firstComponent;
return nullptr;
}
if (!secondComponent->reserve(static_cast<unsigned>(ccPC->size())))
{
ccLog::Error("[qPCA] Not enough memory!");
delete secondComponent;
return nullptr;
}
if (!thirdComponent->reserve(static_cast<unsigned>(ccPC->size())))
{
ccLog::Error("[qPCA] Not enough memory!");
delete thirdComponent;
return nullptr;
}
if (!stdAxisCloud->reserve(static_cast<unsigned>(ccPC->size())))
{
ccLog::Error("[qPCA] Not enough memory!");
delete stdAxisCloud;
return nullptr;
}
// 遍历每个点并应用旋转矩阵
std::stringstream pointStream;
for (unsigned i = 0; i < ccPC->size(); ++i)
{
pointStream.str("");
CCVector3* point = const_cast<CCVector3*>(ccPC->getPoint(i));
// 将 CCVector3 转换为 Eigen::Vector3f
Eigen::Vector4f eigenPoint(point->x, point->y, point->z, 1.0f);
// 旋转点
Eigen::Vector4f rotatedPoint = rotationMatrix * eigenPoint;
// 将结果写回 CCVector3,// 还是不写回了
/*point->x = rotatedPoint.x();
point->y = rotatedPoint.y();
point->z = rotatedPoint.z();*/
//pointStream << point->x << "," << point->y << "," << point->z;
//m_app->dispToConsole(QString::fromStdString(pointStream.str()), ccMainAppInterface::STD_CONSOLE_MESSAGE);
stdAxisCloud->addPoint({ rotatedPoint[0],rotatedPoint[1],rotatedPoint[2] });
if (axis_y_checked) // align to y // y x z
{
firstComponent->addPoint({ rotatedPoint[0],0.0f,rotatedPoint[2] });
secondComponent->addPoint({ 0.0f,rotatedPoint[1],rotatedPoint[2] });
thirdComponent->addPoint({ rotatedPoint[0],rotatedPoint[1],0.0f });
}
else if (axis_x_checked) // align to x // x y z
{
firstComponent->addPoint({ 0.0f,rotatedPoint[1],rotatedPoint[2] });
secondComponent->addPoint({ rotatedPoint[0],0.0f,rotatedPoint[2] });
thirdComponent->addPoint({ rotatedPoint[0],rotatedPoint[1],0.0f });
}
else if(axis_z_checked) // align to z // z x y
{
firstComponent->addPoint({ rotatedPoint[0],rotatedPoint[1],0.0f });
secondComponent->addPoint({ 0.0f,rotatedPoint[1],rotatedPoint[2] });
thirdComponent->addPoint({ rotatedPoint[0],0.0f,rotatedPoint[2] });
}
else
{
ccLog::Error("[qPCA] axis error");
return nullptr;
}
}
// 更新点云
//ccPC->invalidateBoundingBox();
//ccPC->setVisible(false);
// 设置 主成分 颜色 可视化
for (auto pcShape : { stdAxisCloud ,firstComponent,secondComponent,thirdComponent })
{
ccColor::Rgb col = ccColor::Generator::Random();
pcShape->setColor(col);
pcShape->showSF(false);
pcShape->showColors(true);
pcShape->showNormals(true);
pcShape->setVisible(true);
}
// 计算投影 各个方向 主成分 已经变换到标准坐标系下, 直接坐标赋0
//ccPointCloud firstComponent, secondComponent, thirdComponent; // 合并到上面的循环完成
if (!group)
{
group = new ccHObject(QString("PCA processed - align to %1 axis (%2)").arg((axis_y_checked?"y":(axis_z_checked?"z":"x")), ccPC->getName()));
}
if (group)
{
group->addChild(stdAxisCloud);
group->addChild(firstComponent);
group->addChild(secondComponent);
group->addChild(thirdComponent);
}
return group;
}
至此 所有内容都完成
cmake 重新构建、然后编译
效果展示
【csdn 图片最大只支持 5MB,压缩比较大】
感谢免费GIF压缩 - 专研免费“GIF压缩”在线工具 (gifcompress.com) 提供的免费gif压缩服务
下一篇,我们一起学习一下 cc的代码。
如需整个插件项目,编译后的dll,或其他帮助,欢迎留言、私信或加群【群号:392784757】
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » cloud compare PCA插件开发详细步骤(二)附代码

发表评论 取消回复