vscode + cmake + ninja + ARMCC 配置stm32开发环境(调试篇)
1. 前置环境
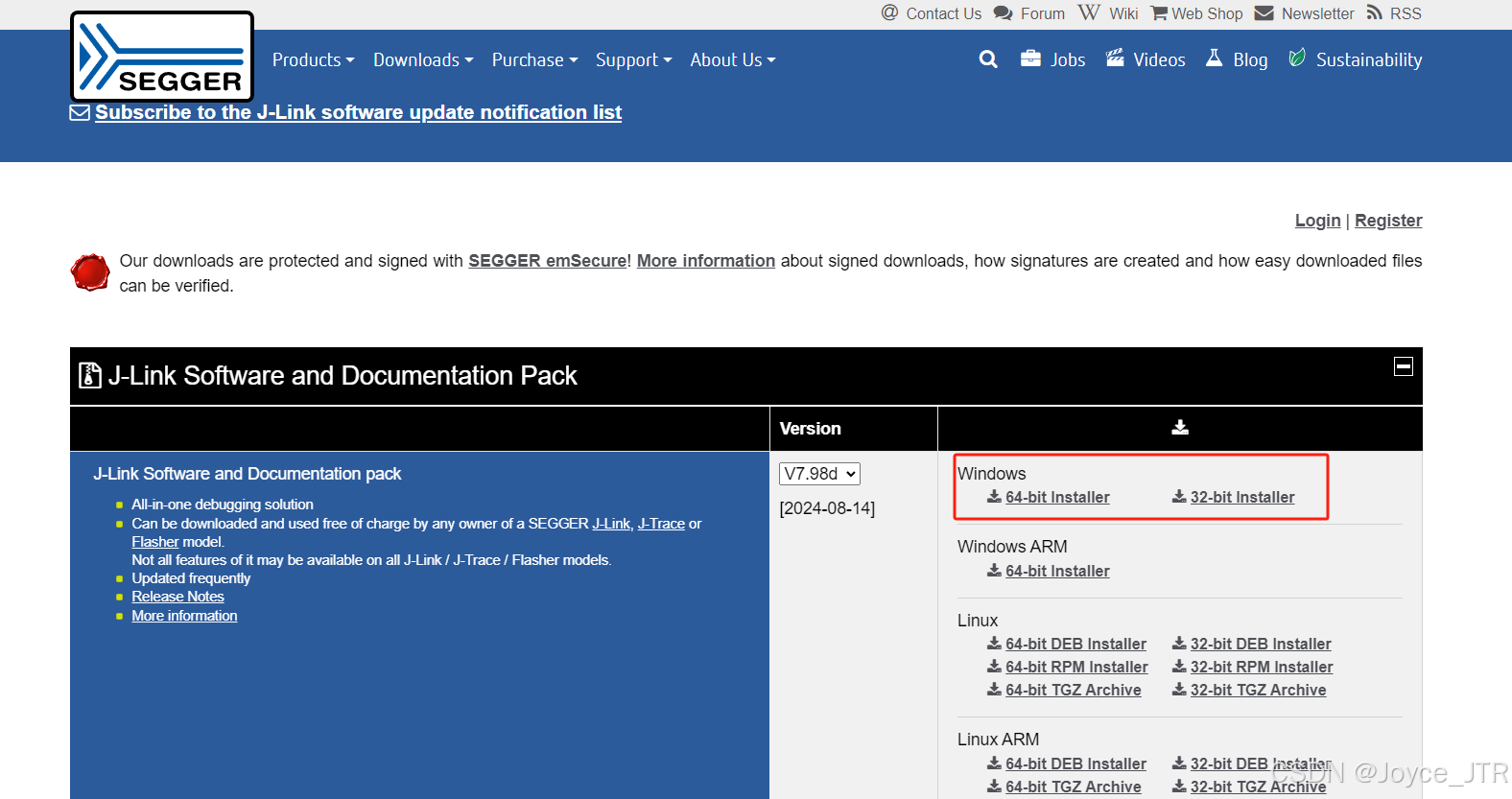
1.1 JLink套件安装
- 从Segger官网上下载Jlink套件安装包进行安装Jlink。Jlink
1.2 vscode的调试插件安装
-
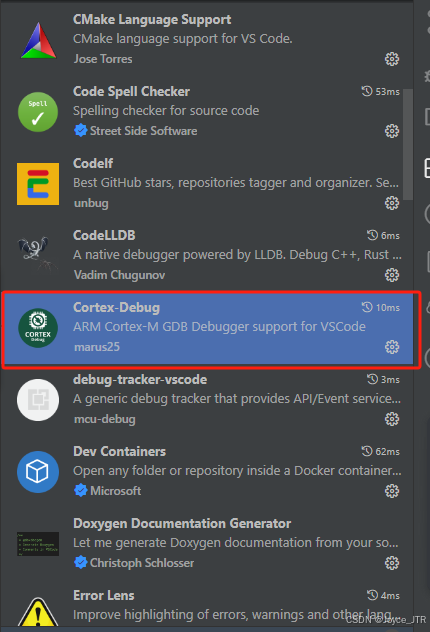
在vscode插件市场中安装
Cortex-Debug插件 -
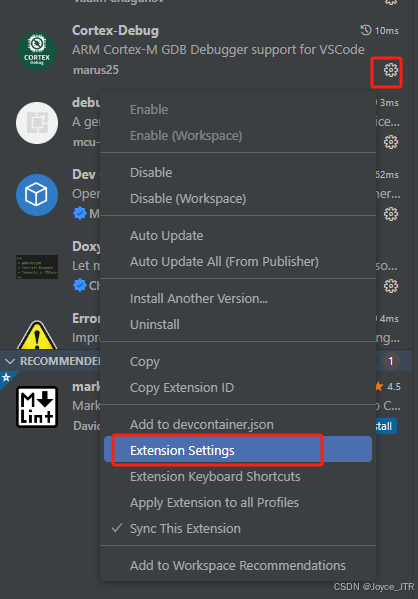
进入设置界面,进行
Cortex-debug插件的配置 -
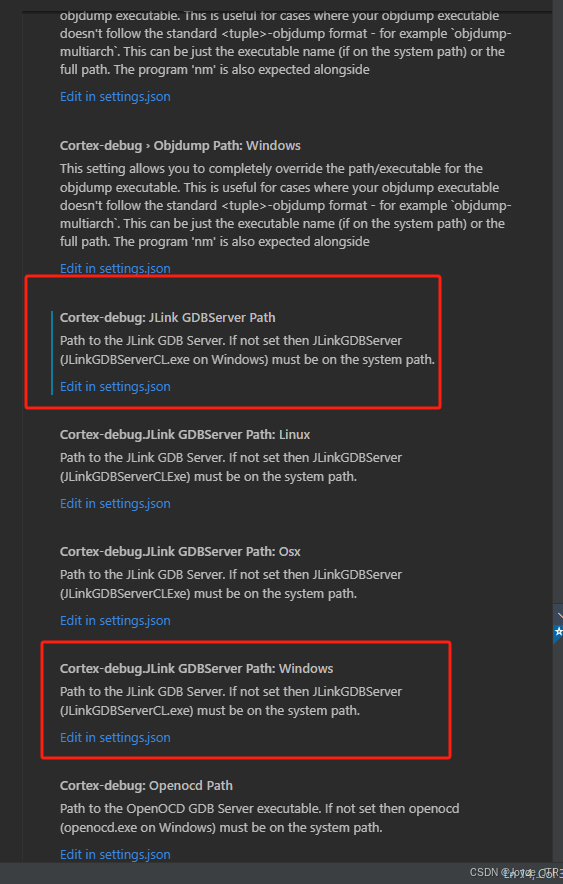
设置
Jlink GDBServer路径 -
保存修改

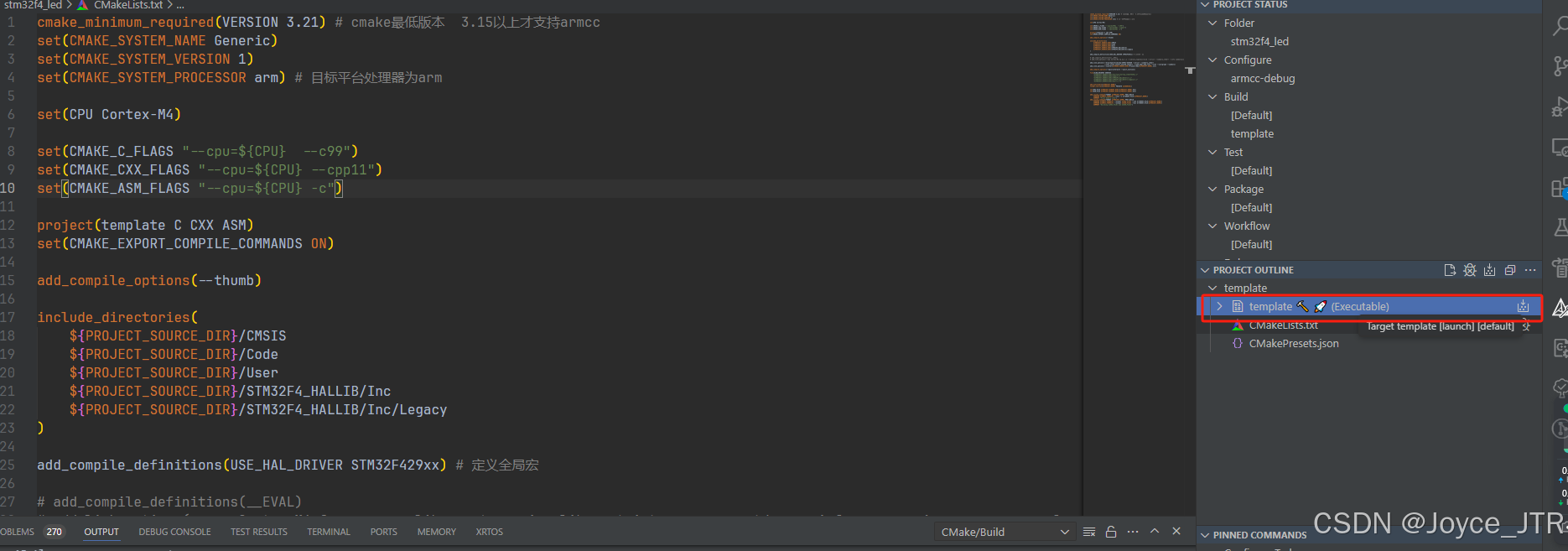
2. 编译
- 使用之前构建篇的工程,在下图的CMake界面就能进行程序的编译。
3. 调试
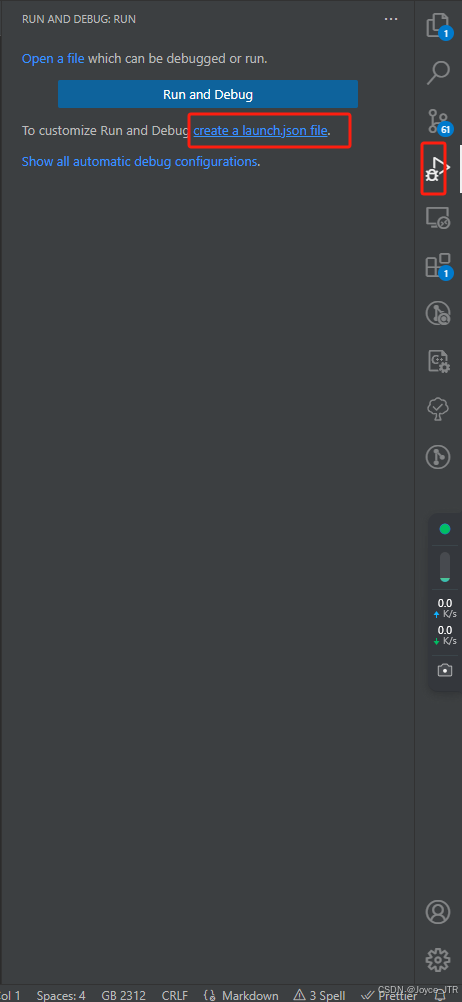
-
在debug界面,选择
create a launch.json file,创建调试文件。 -
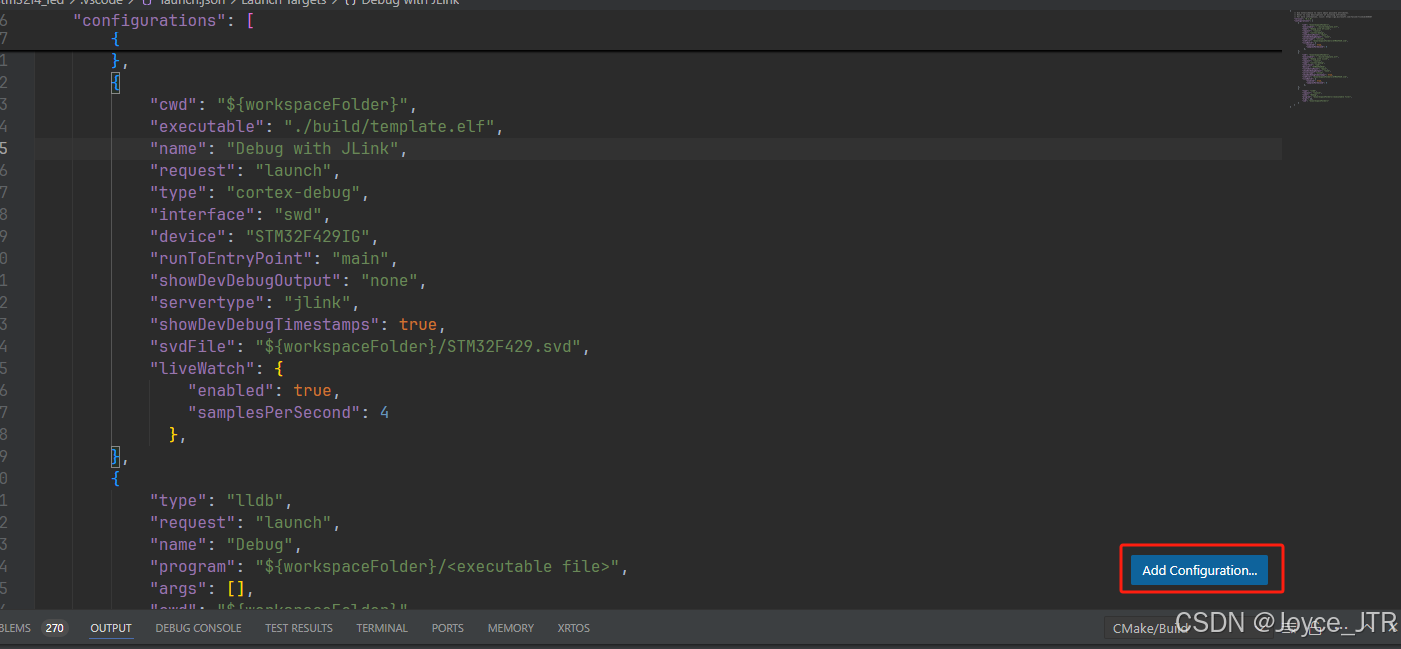
在文件中选择
Add Configuration... -
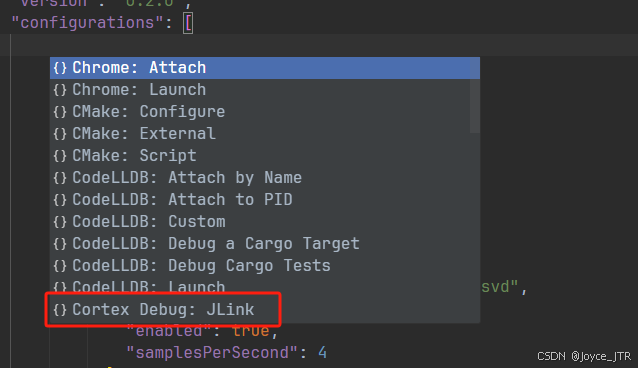
在弹出界面选择
Cortex Debug: Jlink。本文中使用的是Jlink进行调试,同样也能使用stlink或者openOCD。 -
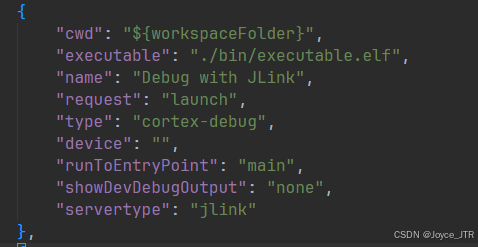
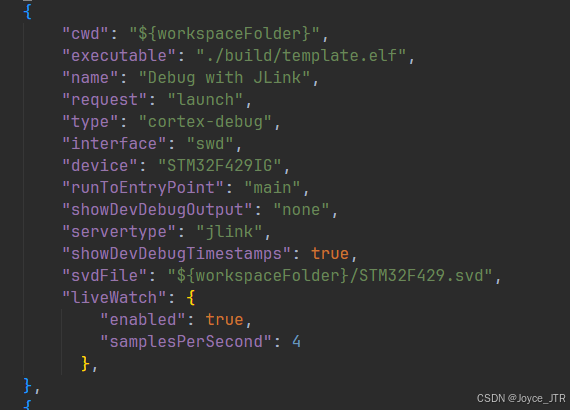
在创建出来的模板中进行修改和新增内容。
其中主要有以下几点进行修改和新增。
"executable":该项目的内容需填写之前编译生成的elf文件所在位置"interface":该项目的内容是用于指定调试使用的接口协议,jtag或者swd"device":该项目的内容用于指定调试的MCU型号,如果在jlink中无法找到自己使用的MCU,必须先添加MCU到Jlink中,才能在这边进行指定"svdFile":该项目内容用于指定svd文件的位置,该文件可以在调试过程中查看寄存器,如果没有此文件,则无法查看寄存器内容
-
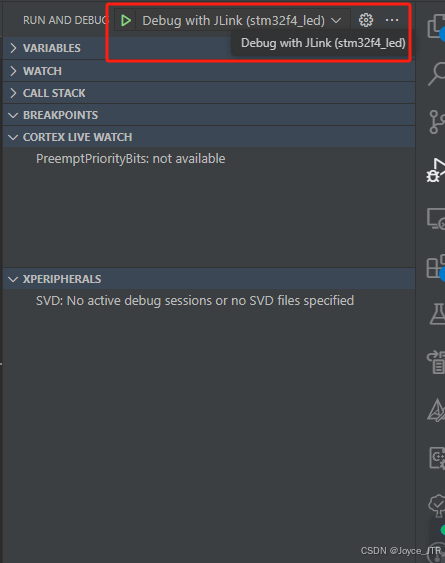
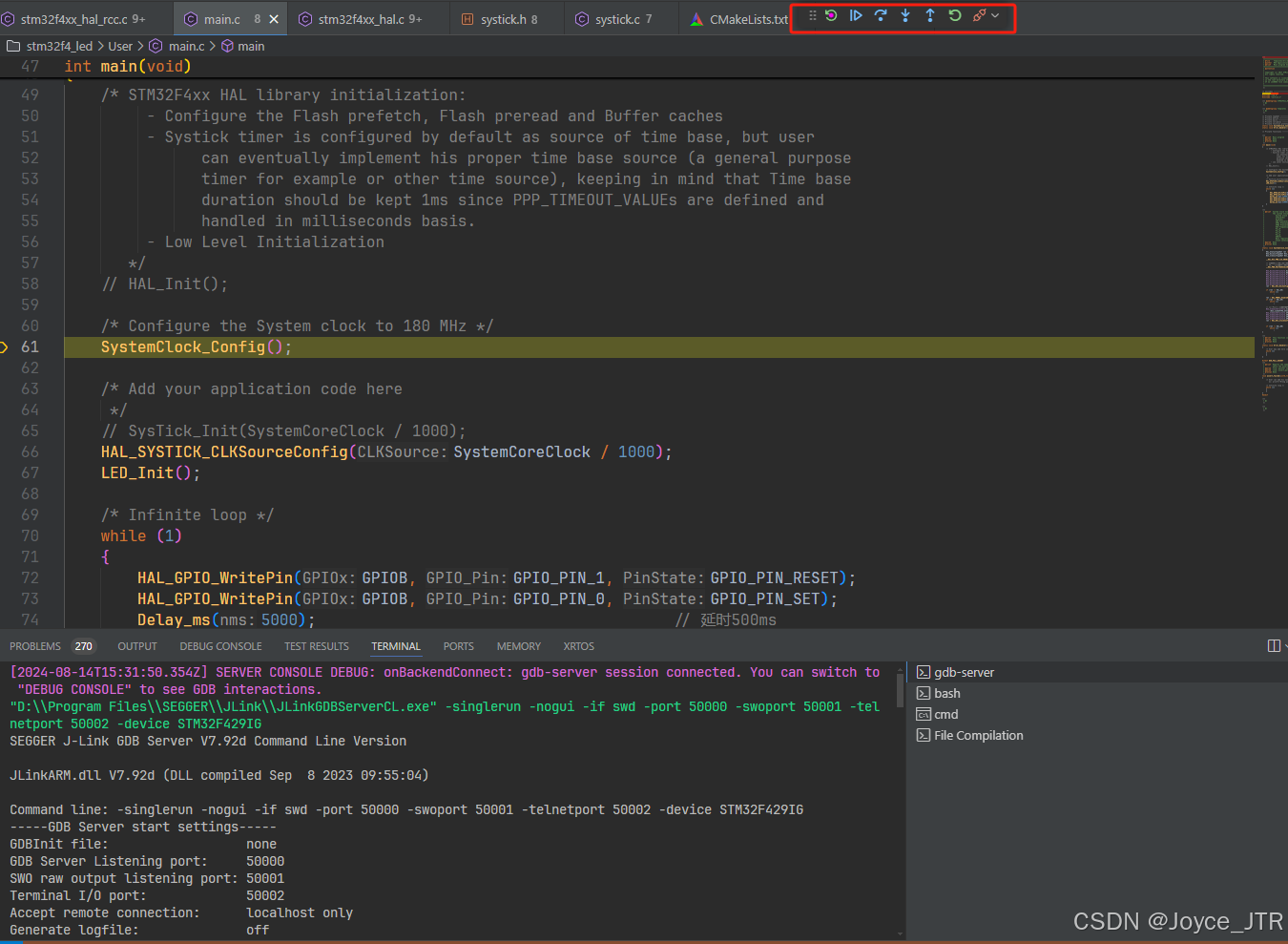
修改完成之后,保存,进入debug界面,选择
Debug with JLink进入调试界面
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » vscode + cmake + ninja + ARMCC 配置stm32开发环境(调试篇)

发表评论 取消回复