目录
SPI外设简介
SPI1挂载在APB2是,PCLK是72M
SPI2挂载在APB1是,PCLK是36M
只了解SPI做主机的情况,一般采样全双工
可以使用DMA自动搬运数据
I2S(音频传输)
- 全双工通信:SPI可以同时发送和接收数据。
- 主从模式:设备可以配置为主模式(提供时钟信号)或从模式(接收时钟信号)。
- 时钟极性和相位:通过配置时钟极性(CPOL)和相位(CPHA),用户可以选择何时进行数据采样和发送。
- 数据帧格式:数据帧可以配置为8位或16位,并且可以选择MSB(最高有效位)优先或LSB(最低有效位)优先发送数据。
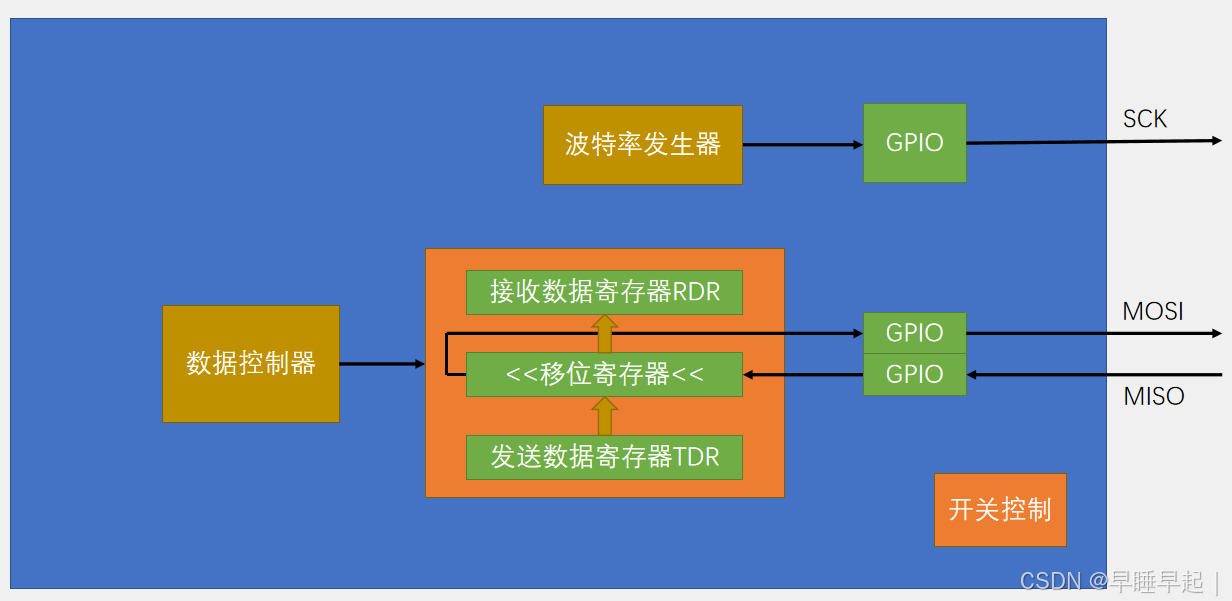
SPI框图
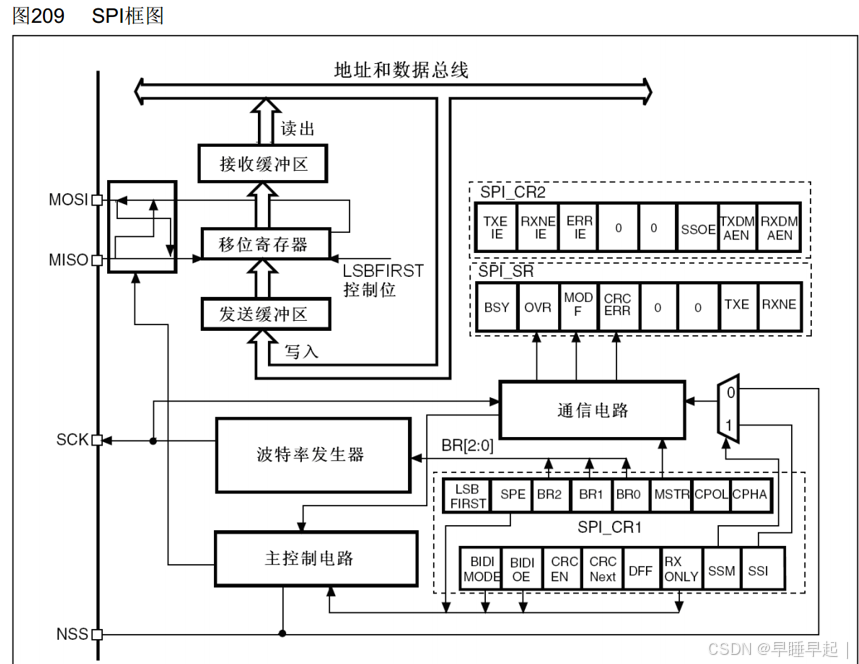
移位寄存器(低位先行的话)右边的数据低位,一位一位的从MOSI移出去,MISO的数据一位一位的移入左边的数据高位 (LSBFIRST控制位可以控制0:高位先行或1:低位先行)
可以参考之前的移位示意图
连续数据流实现过程:
当移位寄存器没有数据要移位时,发送缓存区TDR中的数据立刻转入移位寄存器开始移位,置TXE为1(发送寄存器空),下一个数据转入TDR等候,移位寄存器中有数据时,产生时钟信号,通过MOSI移出数据,同时,MISO移入数据,移出和移入的数据同时完成,将移入的数据转入接收缓存区RDR,置RXNE为1(接收寄存器非空),然后在下个数据到来前尽快读取RDR的数据,可以实现连续输出
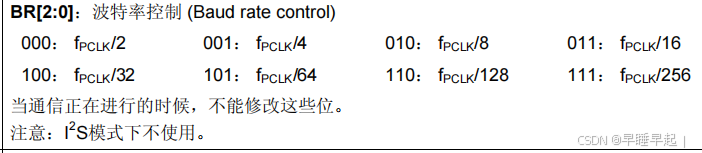
波特率控制
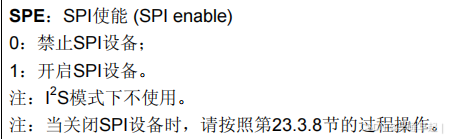
SPE(SPI使能)
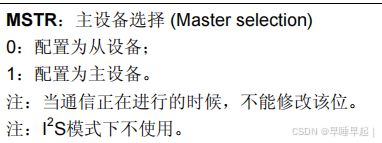
配置主从模式
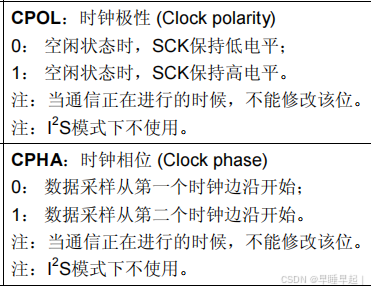
四种模式的选择
发送和接收数据缓冲区状态
I2C基本结构
1. SPI模式选择
- 主从模式(Master/Slave):
- 选择SPI作为主机(Master)或从机(Slave)。
- 在主模式下,SPI生成时钟信号(SCK);在从模式下,SPI接收时钟信号。
2. 时钟极性和相位(CPOL和CPHA)
- 时钟极性(CPOL):
- 决定空闲状态下时钟线(SCK)的电平(高或低)。
- 时钟相位(CPHA):
- 决定数据采样的时间点,即在时钟的上升沿或下降沿采样数据。
- 模式配置:
- 四种模式组合(CPOL = 0/1 和 CPHA = 0/1),决定数据和时钟之间的关系。
3. 波特率设置
- 选择SPI通信的时钟速率,通常由主设备通过波特率预分频器来设置。
- 设置的速率必须适合所连接的从设备,以确保正确的数据传输。
4. 数据帧格式
- 数据位长度:
- 选择数据帧的长度,通常为8位或16位。
- 字节顺序:
- 配置数据帧的传输顺序,可以选择MSB(最高有效位)优先或LSB(最低有效位)优先。
5. NSS引脚管理
- 硬件管理:
- 在硬件模式下,由SPI控制NSS引脚自动选择从设备。
- 软件管理:
- 在软件模式下,NSS引脚由软件手动控制,主设备通过软件命令选择从设备。
- 从设备选择:
- 只有NSS引脚为低电平时,从设备才会响应主设备的指令。
6. 全双工/半双工模式
- 全双工模式:
- SPI可以同时发送和接收数据。
- 半双工模式:
- SPI只能在同一时刻发送或接收数据,而不是同时进行。
7. 多主模式
- 如果SPI总线上可能存在多个主设备,则需要配置多主模式以避免总线冲突。
- 采用总线仲裁机制来处理多个主设备的竞争。
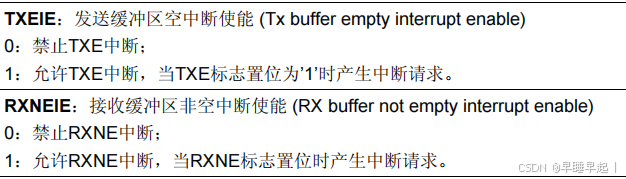
8. 中断和DMA配置
- 中断配置:
- 可以配置SPI的传输完成、接收完成等中断,以提高通信效率。
- DMA配置:
- 若数据量较大,可以使用DMA控制器来自动传输数据,减轻CPU的负担。
9. 启动SPI外设
- 在所有配置完成后,通过设置SPI控制寄存器中的使能位(SPE)来启动SPI外设,开始通信。
10. 配置GPIO引脚
- 配置用于SPI通信的GPIO引脚,包括SCK、MOSI、MISO和NSS。
- 将这些引脚配置为合适的模式(如复用功能模式),并设置正确的电气特性(如推挽输出、开漏输出、上拉/下拉电阻等)。
11. 错误处理机制
- 配置SPI错误处理功能,如溢出错误、帧格式错误等,并定义相应的错误处理流程。
主模式全双工连续传输
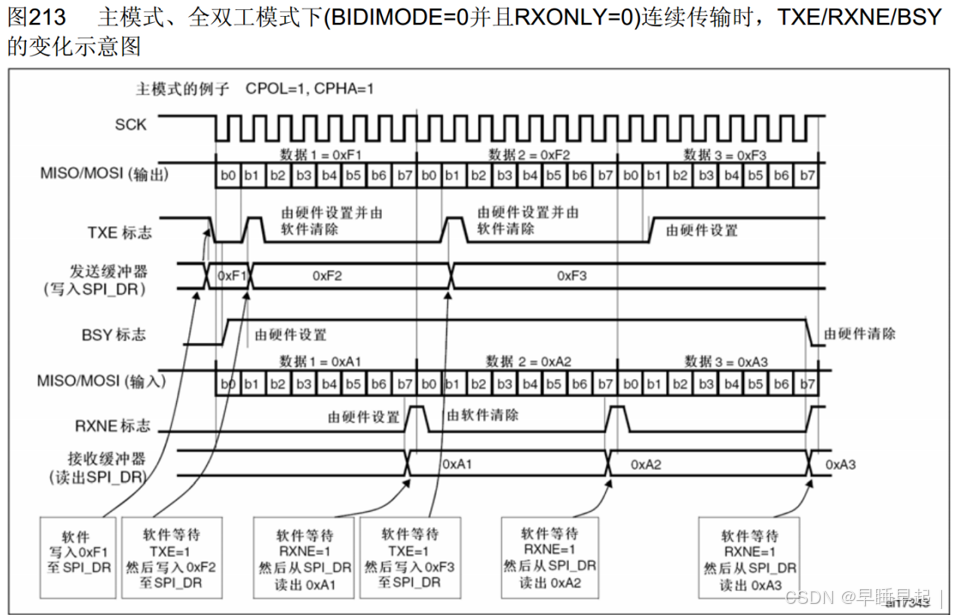
发送数据1,发送数据2,接收数据1,发送数据3,接收数据2,发送数据4,接收数据3
非连续传输
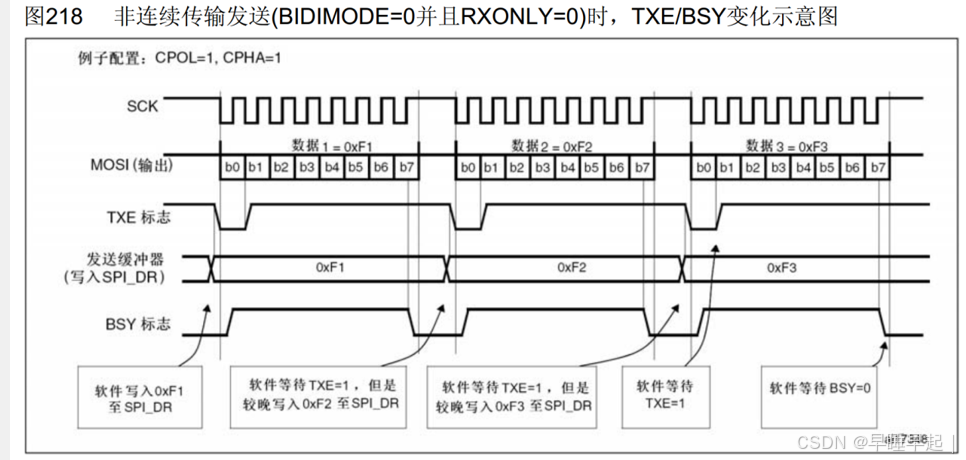
配置SPI3,SCK默认高电平
在想发送数据时,若TXE=1,TDR空,则由软件写入0xF1至SPI_DR,此时TXE变为0,TDR的值为0xF1,会立即向移位寄存器进行传输,TXE置回1,等待接收完成,RXNE置1,再写入下一个数据…………
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 江协科技stm32————11-4 SPI通信协议

发表评论 取消回复