一、方案描述
大联大世平集团针对汽车矩阵大灯,推出 基于 onsemi NCV78343 & NCV78964的汽车矩阵式大灯方案。
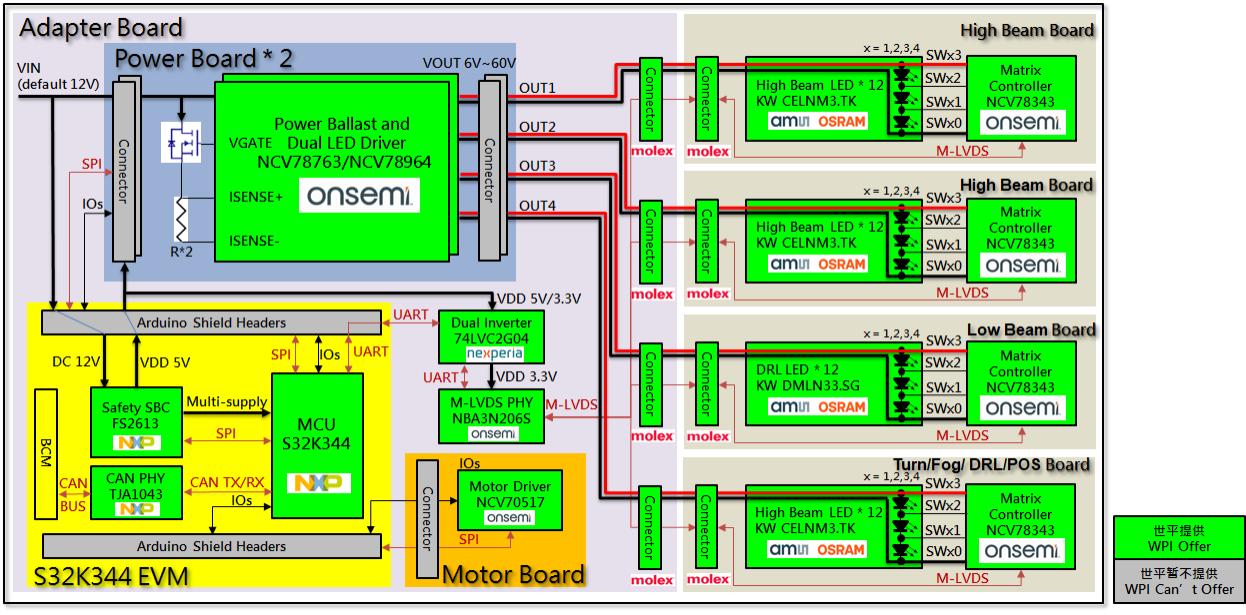
开发板搭载的主要器件有 onsemi 的 Matrix Controller NCV78343、LED Driver NCV78964、Motor Driver NCV70517、以及 NXP 的 MCU S32K344。
二、开发套件包括:
1. S32K344 MCU 主控板 x 1: 采用WPI现有的 S32K344 MCU board 作为主控板, 板上采用车身域最广泛使用的 NXP S32K3 MCU 作为主控芯片, 搭配 FS26 电源安全芯片可满足各级别功能安全要求. MCU 主控板可依据终端客户本身需求自行替换, 或者选用 NXP S32K31 现有各类型开发板来进行矩阵大灯功能开发
2. NCV78343 LED 灯板 x 4: LED 灯珠控制采用 onsemi NCV78343 芯片, 可实现 1-12 个灯珠独立亮灭与 PWM 调光控制, 具开路, 短路与过压诊断保护
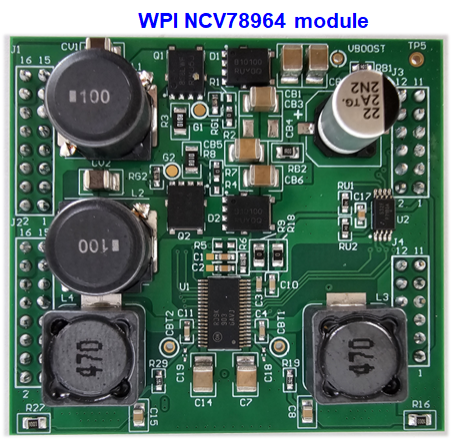
3. NCV78964 LED 驱动模块 x 2: 模块采用双相 Boost-Buck 架构的第四代大灯 LED 驱动芯片, 提供两路 Buck 输出, 每路可输出 60V/1.6A 供电LED灯串, 并具备 PWM 调光功能,
LED 驱动模块化设计的特点是:① 用户可根据自己选用的芯片自行设计 LED 驱动模块进行替换. ② 采用 onsemi 原厂现有提供的第二代芯片 NCV78763 模块. ③ 直接使用 WPI 提供的NCV78964 模块. 弹性的模块替换设计提供用户快速便利方式进行矩阵大灯应用布署与开发
4. MCU 转接控制板 x 1: MCU 控制与通信号透过此板连接到板上芯片, 并与 LED 驱动模块板, 灯板对等连接, 实现矩阵大灯功能, 界面为标准 Arduino UNO 接口, 可对接市面上各类型 MCU 开发板, 用户可以自行选用符合自己需求的 MCU 板来实现大灯功能
5. NCV70517 大灯转向步进电机控制板 x 1: 采用 onsemi NCV70517 来驱动双极步进马达,用来实现车头灯转向功能(Adaptive Frontlight System)
三、参考文献
[1] NCV78343.PDF
[2] NCV78964.PDF
欢迎在方案下方留言评论,我们会及时回复您的问题。
如有更多需求,欢迎联系大联大世平集团 ATU 部门:atu.sh@wpi-group.com 作者:毛毛
更多资讯,请扫码关注我们!
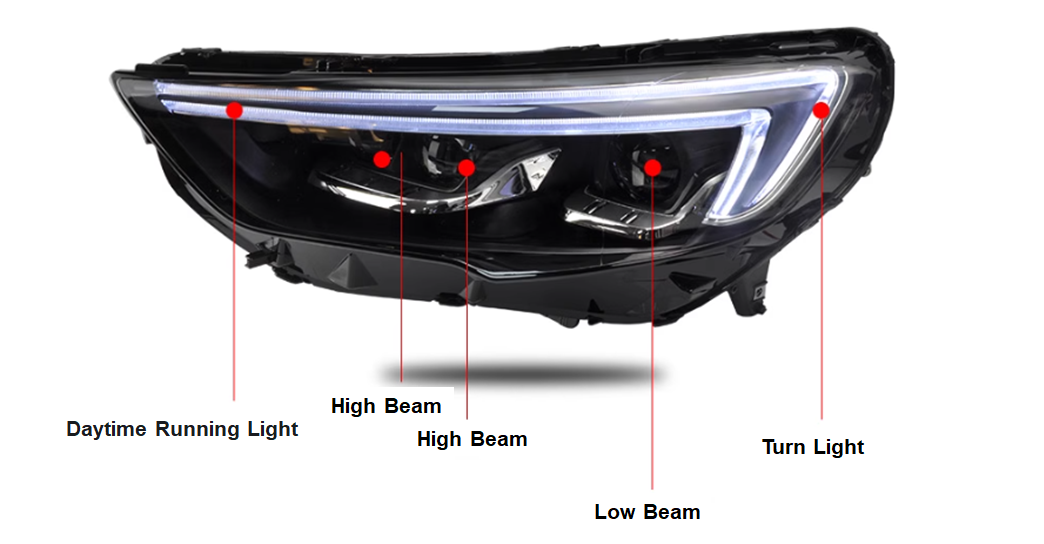
►场景应用图
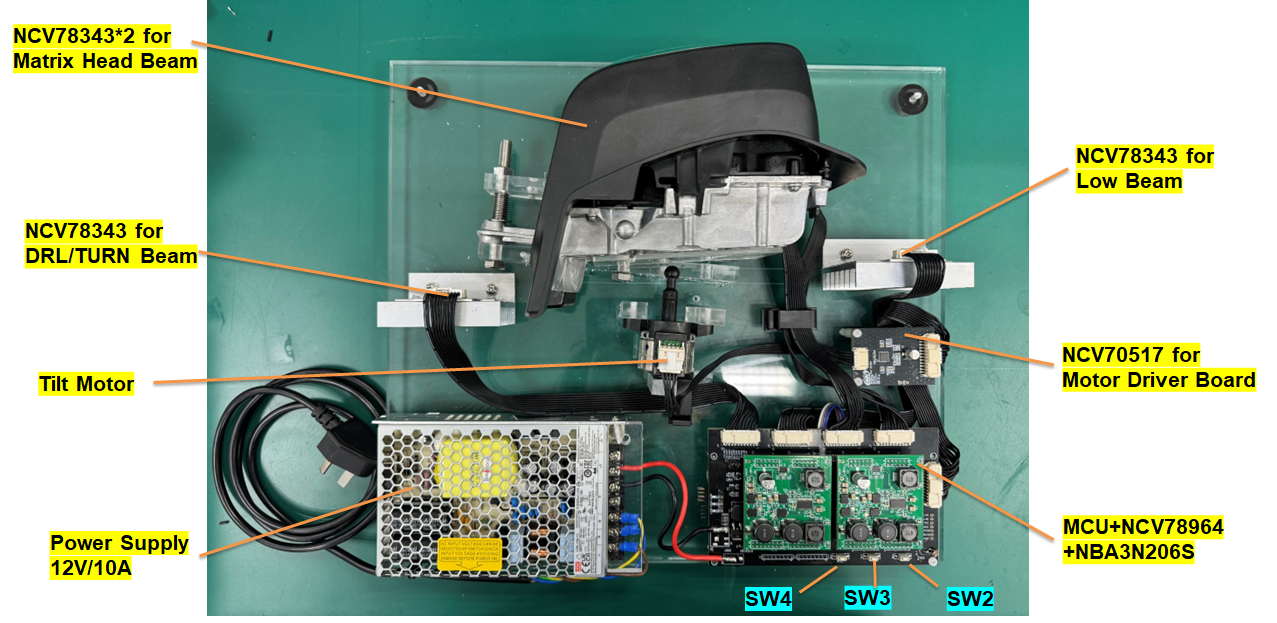
►产品实体图
►展示板照片
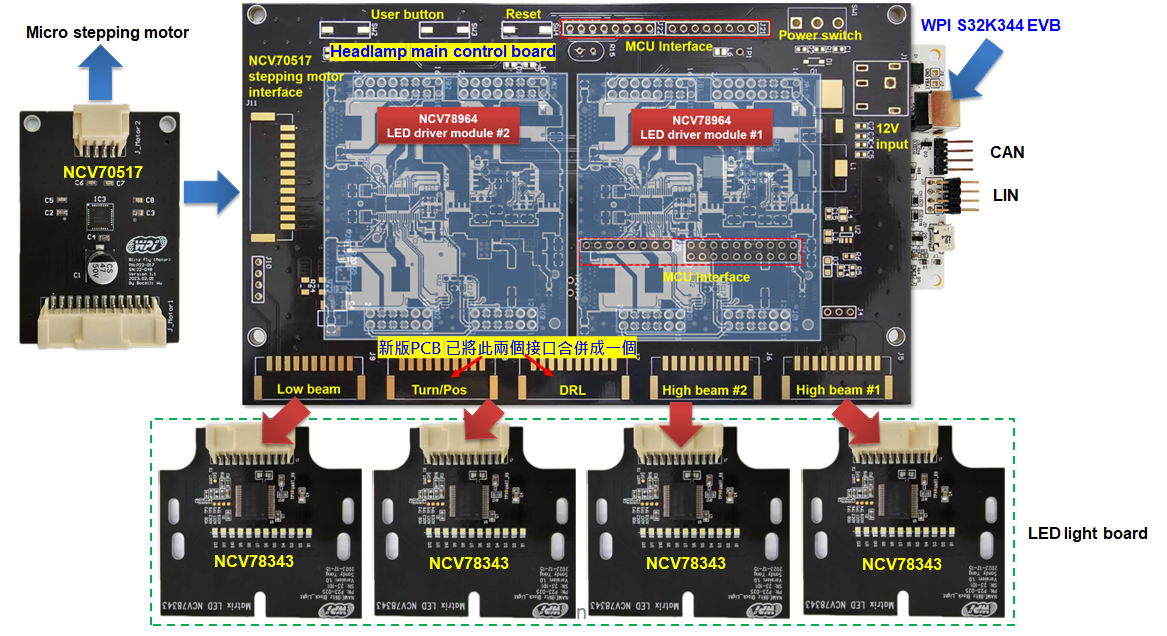
►方案方块图
►核心技术优势
1. NCV78343 可实现 1-12 个灯珠独立亮灭与 PWM 调光控制, 具开路, 短路与过压诊断保护
2. NCV78964 采用双相 Boost-Buck 架构,具备 PWM 调光功能
3. MCU 转接控制板界面为标准 Arduino UNO 接口, 可对接市面上各类型 MCU 开发板
4. 采用 onsemi NCV70517 来驱动双极步进马达,用来实现车头灯转向功能
►方案规格
软件:
1. S32K344 前照灯应用演示软件
2. NCV78964 和 NCV78763 驱动程序
3. NCV78343 驱动器
4. NCV70517 驱动器
技术支持:WPI 矩阵大灯平台用户使用手册,培训文档,软件开发手册等等
开发环境需求:
1. IDE: NXP S32DS 3.4.3 or S32DS 3.5.12
2. NXP S32K3 RTD 2.0.0
3. Debugger: PEMICRO multilink universal, Segger J-link, or WPI LPCLink
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 基于 onsemi NCV78343 & NCV78964的汽车矩阵式大灯方案

发表评论 取消回复