- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
在二值图像中使用概率霍夫变换查找线段。
该函数实现了用于直线检测的概率霍夫变换算法,该算法在文献 181中有所描述。
HoughLinesP(概率霍夫变换)是 OpenCV 中用于检测图像中直线的一种方法,特别适合检测短直线段。相比于标准的 Hough 变换,HoughLinesP 更加高效,因为它只需要检测累积器中的少数几个投票即可确定直线的存在。
函数原型
void cv::HoughLinesP
(
InputArray image,
OutputArray lines,
double rho,
double theta,
int threshold,
double minLineLength = 0,
double maxLineGap = 0
)
参数
-
参数image: 8 位单通道二值源图像。该图像可能在函数执行过程中被修改。
-
参数lines: 输出的直线段向量。每条直线段由一个包含 4 个元素的向量表示(x1, y1, x2, y2),其中(x1, y1)和(x2, y2)分别是检测到的每条直线段的两个端点。
-
参数rho: 累加器的距离分辨率(以像素为单位)。
-
参数theta: 累加器的角度分辨率(以弧度为单位)。
-
参数threshold: 累加器的阈值参数。只有那些获得足够投票数(>threshold)的直线段才会被返回。
-
参数minLineLength: 最小直线长度。长度小于该值的直线段将被拒绝。
-
参数maxLineGap: 允许在同一直线上的点之间的最大间隙(以像素为单位),以将它们连接起来形成直线段。
代码示例
#include "opencv2/highgui.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/imgproc.hpp"
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
// Declare the output variables
Mat dst, cdst, cdstP;
const char* default_file = "sudoku.png";
// Loads an image
Mat src = imread( "/media/dingxin/data/study/OpenCV/sources/images/line.jpg", IMREAD_GRAYSCALE );
// Check if image is loaded fine
if ( src.empty() )
{
printf( " Error opening image\n" );
printf( " Program Arguments: [image_name -- default %s] \n", default_file );
return -1;
}
// Edge detection
Canny( src, dst, 50, 200, 3 );
// Copy edges to the images that will display the results in BGR
cvtColor( dst, cdst, COLOR_GRAY2BGR );
cdstP = cdst.clone();
// Standard Hough Line Transform
vector< Vec2f > lines; // will hold the results of the detection
HoughLines( dst, lines, 1, CV_PI / 180, 150, 0, 0 ); // runs the actual detection
// Draw the lines
for ( size_t i = 0; i < lines.size(); i++ )
{
float rho = lines[ i ][ 0 ], theta = lines[ i ][ 1 ];
Point pt1, pt2;
double a = cos( theta ), b = sin( theta );
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound( x0 + 1000 * ( -b ) );
pt1.y = cvRound( y0 + 1000 * ( a ) );
pt2.x = cvRound( x0 - 1000 * ( -b ) );
pt2.y = cvRound( y0 - 1000 * ( a ) );
line( cdst, pt1, pt2, Scalar( 0, 0, 255 ), 3, LINE_AA );
}
// Probabilistic Line Transform
vector< Vec4i > linesP; // will hold the results of the detection
HoughLinesP( dst, linesP, 1, CV_PI / 180, 50, 50, 10 ); // runs the actual detection
// Draw the lines
for ( size_t i = 0; i < linesP.size(); i++ )
{
Vec4i l = linesP[ i ];
line( cdstP, Point( l[ 0 ], l[ 1 ] ), Point( l[ 2 ], l[ 3 ] ), Scalar( 0, 0, 255 ), 3, LINE_AA );
}
// Show results
imshow( "Source", src );
imshow( "Detected Lines (in red) - Standard Hough Line Transform", cdst );
imshow( "Detected Lines (in red) - Probabilistic Line Transform", cdstP );
// Wait and Exit
waitKey();
return 0;
}
这是一张针对函数参数已进行调优的示例图片:
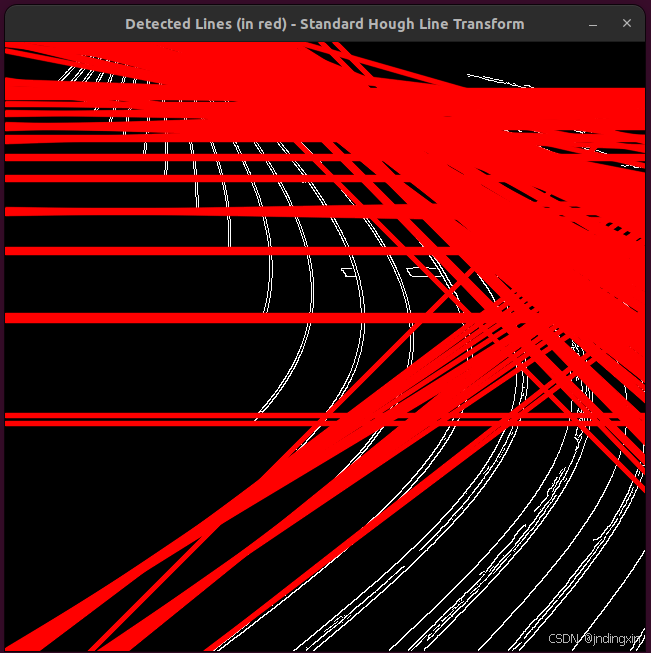
这是在使用霍夫变换HoughLines时输出结果:
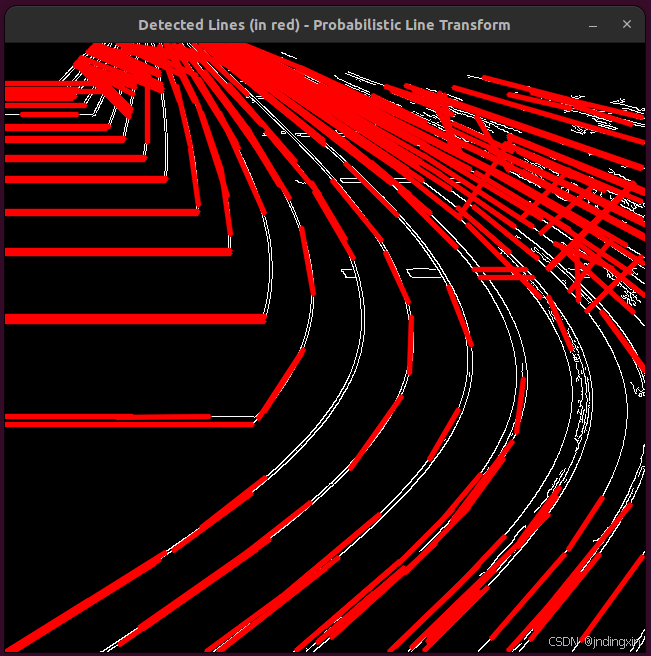
这是使用概率霍夫变换HoughLinesP时输出结果:
从效果图上看,使用概率霍夫变换HoughLinesP的效果会好很多。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » OpenCV特征检测(10)检测图像中直线的函数HoughLinesP()的使用

发表评论 取消回复