相机的内参和外参是计算机视觉和摄影测量中的重要概念。以下是对它们的详细说明:
内参(Intrinsic Parameters)
内参定义了相机的内部特性,主要包括焦距、主点坐标以及畸变系数。内参矩阵 K 形式如下:
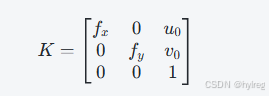
外参(Extrinsic Parameters)
外参描述了相机在世界坐标系中的位置和方向。外参通常由平移向量 t 和旋转矩阵 R 组成。
- 平移向量 t:表示相机中心在世界坐标系中的位置。
- 旋转矩阵 R:表示相机的朝向,定义了相机坐标系与世界坐标系之间的关系。
外参通常以矩阵形式表示为:
总结
- 内参 控制了图像的几何特性,如焦距和主点位置。
- 外参 描述了相机在三维空间中的位置和方向。
如果需要具体的外参数值,通常需要通过标定过程获得。标定过程中,使用已知三维场景点与其对应的二维图像点进行计算。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 相机的内参 外参

发表评论 取消回复