看门狗是什么
硬件看门狗芯片,Watch DogTimer,可用于受到电气噪音、电源故障、静电放电等影响(造成软件运行进入死循环,或者卡死)的应用,当主控芯片程序运行异常时(一段时间主控芯片没有在特定“喂狗”引脚输出波形变化0一1或1一0),看门狗芯片拉低RESETN引脚复位主控芯片,让主控芯片重新加载运行看门狗的引脚定义与时序。
看门狗芯片除了定时喂狗复位功能,一般都有POR上电复位+手动复位。有的喂狗时间还可调。有的看门狗芯片额外有电压监测功能。
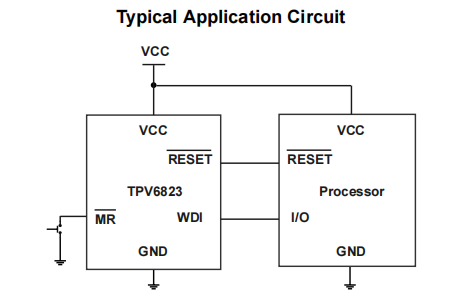
应用架构图
在实际应用中,看门狗芯片通常连接至微控制器(MCU)的一个GPIO端口。MCU会在其正常运行期间定期向该端口写入一个高电平或低电平信号,以此告诉看门狗“我还活着”。如果MCU未能按时发出信号,看门狗就会触发复位操作。
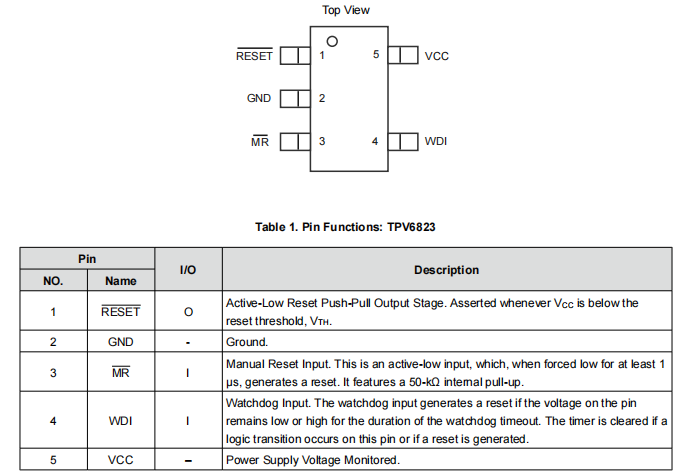
TPV6823芯片功能硬件
引脚定义:VCC芯片供电(含POR功能)WDI喂狗信号RESETn复位输出信号MRn手动复位输入
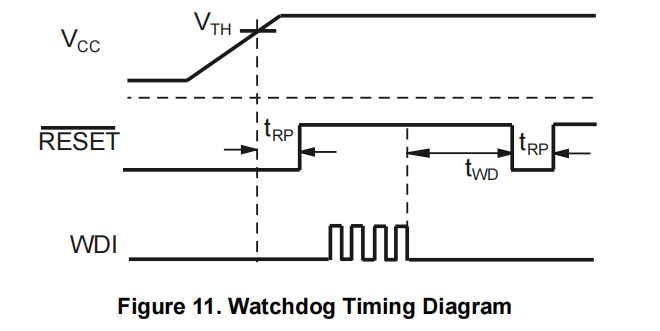
时序图
关键参数:上电POR阁值电压Vth=2.93V,复位拉低时间tRP=200ms,喂狗超时时间tWD=1.6s


为什么要一般是要保持200个毫秒左右的这种低电平的时间
1.芯片要求的这个有效的复位的低电频带宽,一般是几百纳秒的级别,或者是最多可以到毫秒的级别。
2.是电源刚上电的时候。如果说我们做过单板调试的话,会知道很多芯片它在上电的时候会有一个电流冲击。就是芯片在刚上电的时候,它的这个输入电流会非常大。有一个电流冲击的话,很有可能会导致电源的电压产生一个跌落的毛刺。如果说我的复位时间长一点的话,就能保证我的这个电源的供电电压恢复正常。
3.在给主芯片供电的时候,主芯片可能是有很多个电源供电的,比如说有0.9、1.2、1.8、3.3等多个电源来进行供电才能正常工作的那如果说我用3.3伏来做上电复位的话,其他电源不一定上电完成了。那么电源的上电时间,一般是几百个微秒到几个毫秒之间,所以说200个毫秒的时间就可以保证我的其他持续的电源也都完成上电,进入这种正常工作的状态。这就是这个低电平拉低的时间的意义
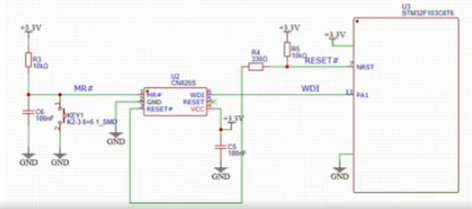
看门狗电路实际应用与条件
一、关注芯片启动速度与喂狗时间
启动速度:芯片的启动速度是指从上电到其内部各个模块初始化完成并开始正常工作所需的时间。这个时间取决于芯片的设计、制造工艺以及外部电路的配置等因素。
喂狗时间(tWD):喂狗时间是指看门狗芯片在接收到“喂狗”信号后,允许主控芯片继续正常运行的时间窗口。如果在这个时间内没有收到有效的“喂狗”信号,看门狗芯片将触发复位操作。
启动速度与喂狗时间的关系:为了确保系统的稳定性,需要确保芯片在tWD时间内完成启动并开始喂狗。如果启动速度过慢,导致无法在tWD时间内完成启动并开始喂狗,那么看门狗芯片会认为系统出现异常并触发复位操作。因此,在设计和选择芯片时,需要考虑其启动速度是否能够满足tWD时间的要求。
二、关注电平与复位信号
输出电平:看门狗芯片的输出电平通常有推挽和ODMR两种形式。推挽输出具有较高的驱动能力和较低的输出阻抗,适用于长距离传输和大功率负载;而ODMR输出则具有较低的功耗和较小的EMI干扰,适用于对功耗和EMI要求较高的场合。
复位信号:复位信号是看门狗芯片输出给主控芯片的一个重要信号。当供电电压正常且一直有喂狗信号时,复位信号为高电平,主控芯片正常运行;当供电电压低于设定阈值或超时无喂狗信号时,复位信号为低电平,主控芯片被复位。
串阻的作用:在复位信号线上串联一个电阻(如330欧姆),可以抑制噪声和EMC干扰,同时保证正常的复位功能不受影响。这是因为电阻对于高频和低频信号都有一定的抑制作用,能够减少信号线上的干扰和噪声。
三、手动复位与防抖设计
手动复位:通过设置一个开关(如KEY1),可以手动闭合开关以触发看门狗芯片的手动复位功能。这在调试过程中非常有用,可以方便地测试系统的复位功能是否正常。
防抖设计:在手动复位开关处添加一个防抖电容(如100nF),可以消除因开关抖动或接触不良导致的误触发。防抖电容能够吸收开关抖动产生的短暂脉冲,确保复位信号的稳定性和可靠性。
四、串阻的放置与作用
串阻的放置:串阻应放置在靠近主芯片的复位引脚处,以减小信号线上的干扰和噪声对复位信号的影响。这样可以确保复位信号的稳定性和可靠性。
串阻的作用:串阻不仅能够抑制噪声和EMC干扰,还能够在一定程度上影响复位信号的上升时间和下降时间。通过选择合适的串阻值,可以优化复位信号的边沿特性,提高系统的稳定性和可靠性。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 看门狗电路设计

发表评论 取消回复