项目完整源码与模型
- YOLOv9实现源码:项目完整源码及教程-点我下载
- 数据集:自行车识别检测数据集1901张带xml和txt标签-点我下载
- YOLOv8实现带GUI界面源码:项目完整源码及教程-点我下载
- YOLOv8实现不带GUI源码:项目完整源码及教程-点我下载
基于YOLOv9实现的自行车检测系统:为自行车违停项目开发
项目概述
随着城市化进程的加快,自行车作为绿色出行工具,其数量在不断增加。然而,随之而来的自行车违停问题也日益严重,给城市交通管理带来了挑战。为了有效监测自行车违停情况,我们基于YOLOv9(You Only Look Once version 9)开发了一款自行车检测系统。该系统能够实时检测视频或图像中的自行车,并识别其是否违停,为城市交通管理提供智能化解决方案。
本文将详细介绍该系统的Python源码、运行教程、训练好的模型以及评估指标曲线,旨在帮助读者快速上手并将其应用于自行车违停项目的开发中。
项目内容
- Python源码:包含系统的核心算法、数据处理、模型加载与推理等部分。
- 运行教程:详细指导如何安装依赖、配置环境、运行系统等步骤。
- 训练好的模型:提供已经训练好的YOLOv9模型权重文件,用于检测自行车。
- 评估指标曲线:展示模型在训练过程中的准确率、召回率等评估指标的变化情况。
Python源码详解
1. 环境配置
首先,确保你的开发环境中安装了以下依赖库:
- PyTorch
- OpenCV
- NumPy
- Matplotlib
- YOLOv9官方库或相关实现
可以使用以下命令安装这些依赖:
pip install torch torchvision opencv-python-headless numpy matplotlib
# 根据需要安装YOLOv9的实现库,具体步骤请参考官方文档
博主环境如下:(供参考,也可以配置与我一样)
【说明】
1、以下是我训练测试环境的软件包及版本,博主用的是python3.9,供参考。
2、自己训练测试不一定非得与我的环境软件包本本一摸一样。
3、博主使用的显卡型号位英伟达2080ti
Package Version
------------------------ --------------------
absl-py 2.1.0
albucore 0.0.12
albumentations 1.4.12
annotated-types 0.7.0
asttokens 2.4.1
certifi 2024.7.4
charset-normalizer 3.3.2
contourpy 1.2.1
cycler 0.12.1
decorator 5.1.1
eval_type_backport 0.2.0
exceptiongroup 1.2.2
executing 2.0.1
filelock 3.15.4
fonttools 4.53.1
fsspec 2024.6.1
gitdb 4.0.11
GitPython 3.1.43
grpcio 1.65.1
idna 3.7
imageio 2.34.2
importlib_metadata 8.2.0
importlib_resources 6.4.0
ipython 8.18.1
jedi 0.19.1
Jinja2 3.1.4
kiwisolver 1.4.5
lazy_loader 0.4
Markdown 3.6
MarkupSafe 2.1.5
matplotlib 3.9.1
matplotlib-inline 0.1.7
mpmath 1.3.0
networkx 3.2.1
numpy 1.26.4
nvidia-cublas-cu12 12.1.3.1
nvidia-cuda-cupti-cu12 12.1.105
nvidia-cuda-nvrtc-cu12 12.1.105
nvidia-cuda-runtime-cu12 12.1.105
nvidia-cudnn-cu12 9.1.0.70
nvidia-cufft-cu12 11.0.2.54
nvidia-curand-cu12 10.3.2.106
nvidia-cusolver-cu12 11.4.5.107
nvidia-cusparse-cu12 12.1.0.106
nvidia-nccl-cu12 2.20.5
nvidia-nvjitlink-cu12 12.5.82
nvidia-nvtx-cu12 12.1.105
opencv-python 4.10.0.84
opencv-python-headless 4.10.0.84
packaging 24.1
pandas 2.2.2
parso 0.8.4
pexpect 4.9.0
Pillow 9.1.0
pip 24.0
prompt_toolkit 3.0.47
protobuf 4.25.4
psutil 6.0.0
ptyprocess 0.7.0
pure_eval 0.2.3
pycocotools 2.0.8
pydantic 2.8.2
pydantic_core 2.20.1
Pygments 2.18.0
pyparsing 3.1.2
python-dateutil 2.9.0.post0
pytz 2024.1
PyYAML 6.0.1
requests 2.32.3
scikit-image 0.24.0
scipy 1.13.1
seaborn 0.13.2
setuptools 69.5.1
six 1.16.0
slim 0.1
smmap 5.0.1
stack-data 0.6.3
sympy 1.13.1
tensorboard 2.17.0
tensorboard-data-server 0.7.2
tf-slim 1.1.0
thop 0.1.1.post2209072238
tifffile 2024.7.24
tomli 2.0.1
torch 1.10.1+cu111
torchaudio 0.10.1+cu111
torchvision 0.11.2+cu111
tqdm 4.66.4
traitlets 5.14.3
triton 3.0.0
typing_extensions 4.12.2
tzdata 2024.1
urllib3 2.2.2
wcwidth 0.2.13
Werkzeug 3.0.3
wheel 0.43.0
zipp 3.19.2
2. 数据处理
数据处理部分包括数据集的准备、标注文件的解析以及数据增强等。我们使用了自定义的数据集格式,其中包含自行车及其违停情况的图片和对应的标注文件(如XML或JSON格式)。
# 数据集加载与预处理示例代码
from dataset import CustomDataset
dataset = CustomDataset(root='path/to/dataset', transform=transforms.Compose([...]))
dataloader = DataLoader(dataset, batch_size=16, shuffle=True, num_workers=4)
3. 模型加载与推理
我们使用YOLOv9作为目标检测模型,并加载训练好的权重文件。推理部分包括图片预处理、模型前向传播和后处理(如NMS非极大值抑制)等步骤。
# 模型加载与推理示例代码
import torch
from models.yolo import YOLOv9
model = YOLOv9(weights='path/to/weights/yolov9_bicycle.pt')
model.eval()
# 图片推理示例
img = cv2.imread('path/to/image.jpg')
results = model(img)
# 后处理:解析检测结果并绘制边界框
4. 结果展示与违停判断
检测结果通过OpenCV绘制在原始图片上,并显示自行车的检测框及其是否违停的判断结果。
# 结果展示与违停判断示例代码
for result in results:
x1, y1, x2, y2, conf, cls = result
if cls == bicycle_class_id and is_illegal_parking(x1, y1, x2, y2): # 假设有is_illegal_parking函数判断违停
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 0, 255), 2) # 红色框表示违停
cv2.putText(img, 'Illegal Parking', (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
else:
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2) # 绿色框表示合法停放
cv2.imshow('Detected Image', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行教程
1. 下载项目代码
- YOLOv9实现源码:项目完整源码及教程-点我下载
- 数据集:自行车识别检测数据集1901张带xml和txt标签-点我下载
- YOLOv8实现带GUI界面源码:项目完整源码及教程-点我下载
- YOLOv8实现不带GUI源码:项目完整源码及教程-点我下载
2. 配置环境
按照上述环境配置部分安装依赖库,并确保Python版本符合要求。
3. 准备数据集
将你的数据集按照项目要求的格式整理好,并放置在指定目录下。数据集应包含自行车及其违停情况的图片和对应的标注文件。
4. 运行系统
使用命令行或IDE运行主程序文件(如main.py),并传入必要的参数(如数据集路径、模型权重文件路径、视频文件路径等)。
python main.py --dataset_path path/to/dataset --weights_path path/to/weights/yolov9_bicycle.pt --video_path path/to/video.mp4
或者,如果你只想检测单张图片,可以修改代码以接受图片路径作为输入。
训练好的模型
我们提供了已经训练好的YOLOv9模型权重文件yolov9_bicycle.pt,该文件可以直接用于检测自行车及其违停情况。你可以从项目中的models/weights目录下找到这个文件。
训练模型结果截图,迭代200次
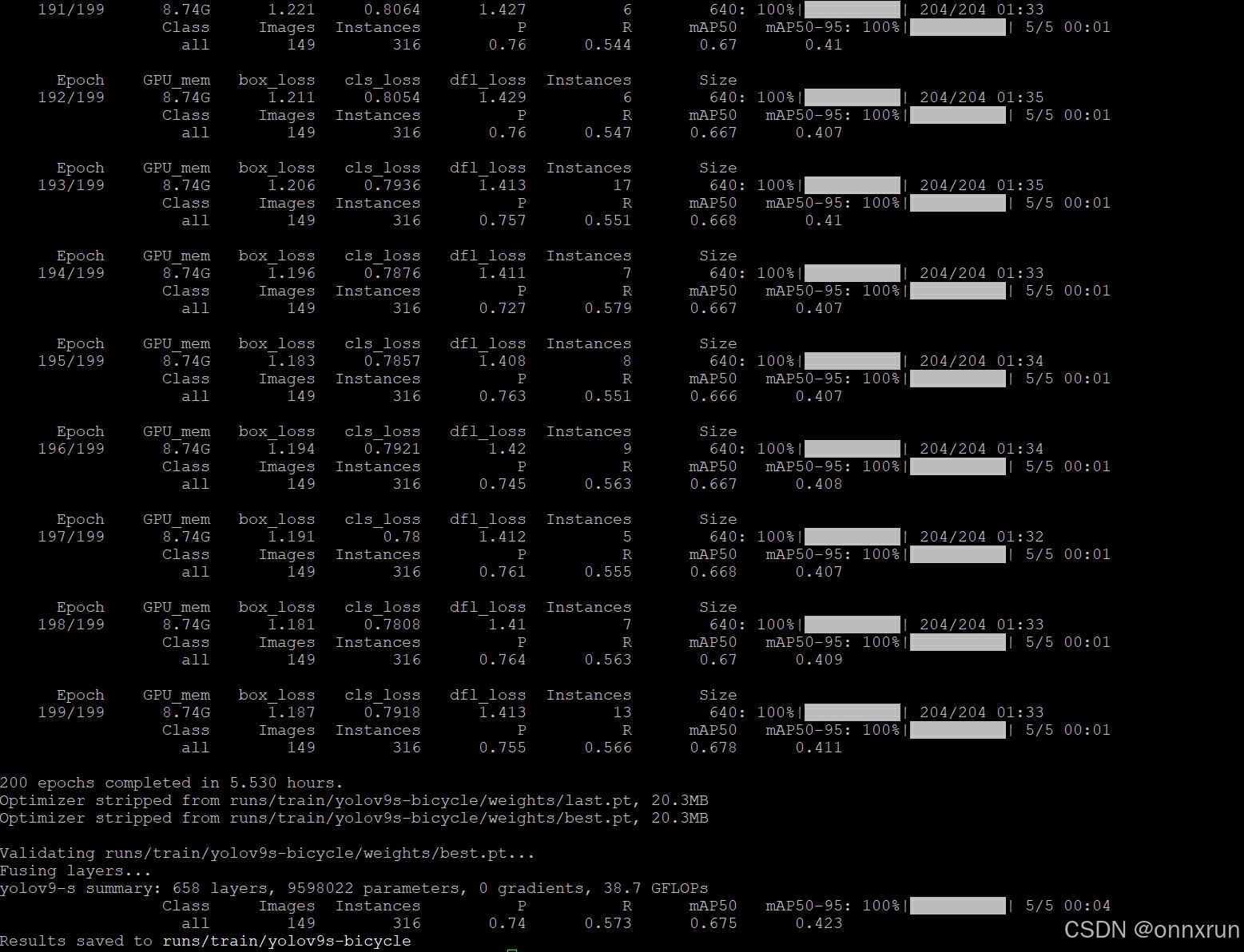
评估指标曲线
在训练过程中,我们记录了模型的准确率、召回率等评估指标的变化情况,并绘制了评估指标曲线。这些曲线可以帮助你了解模型的训练效果和性能。
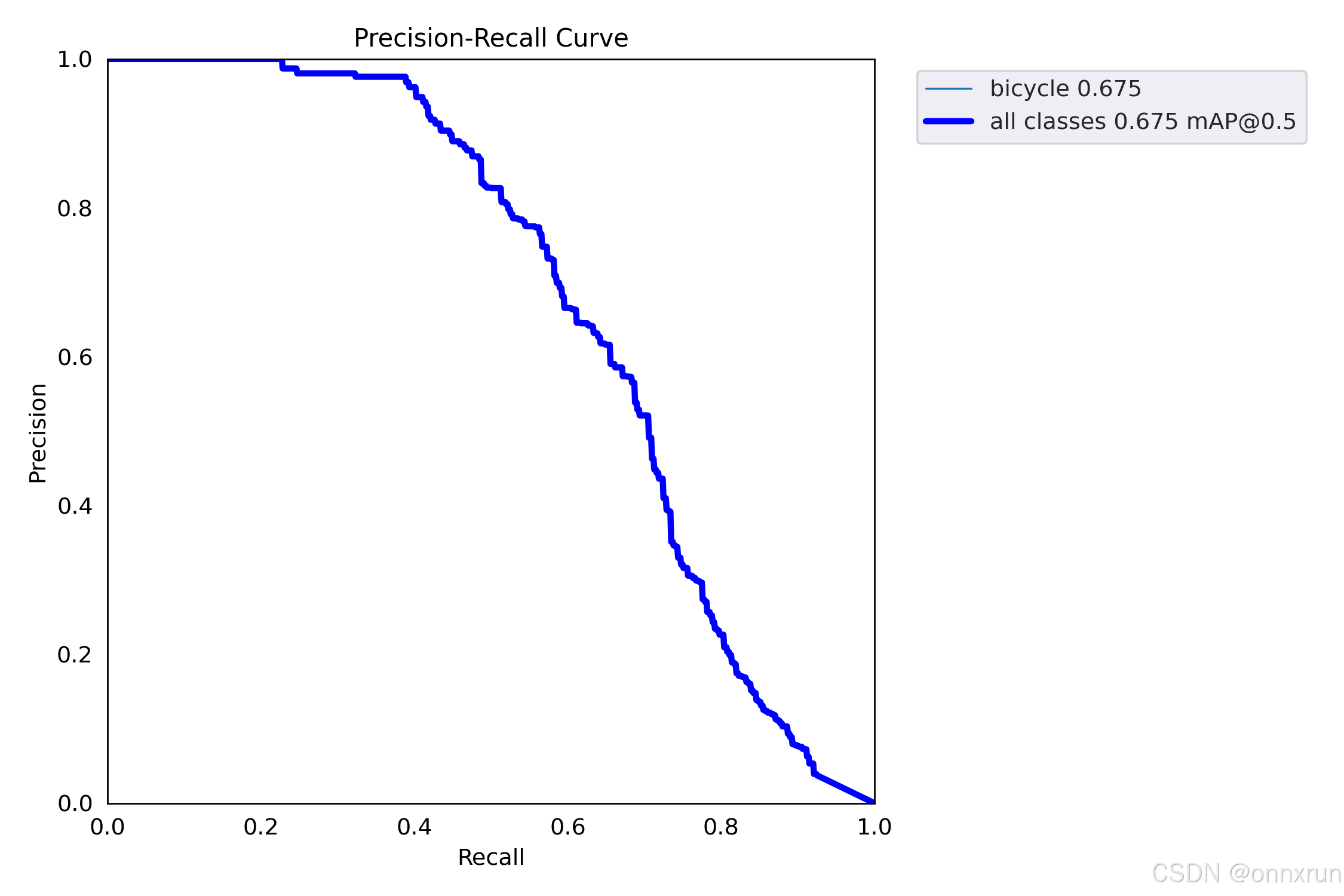
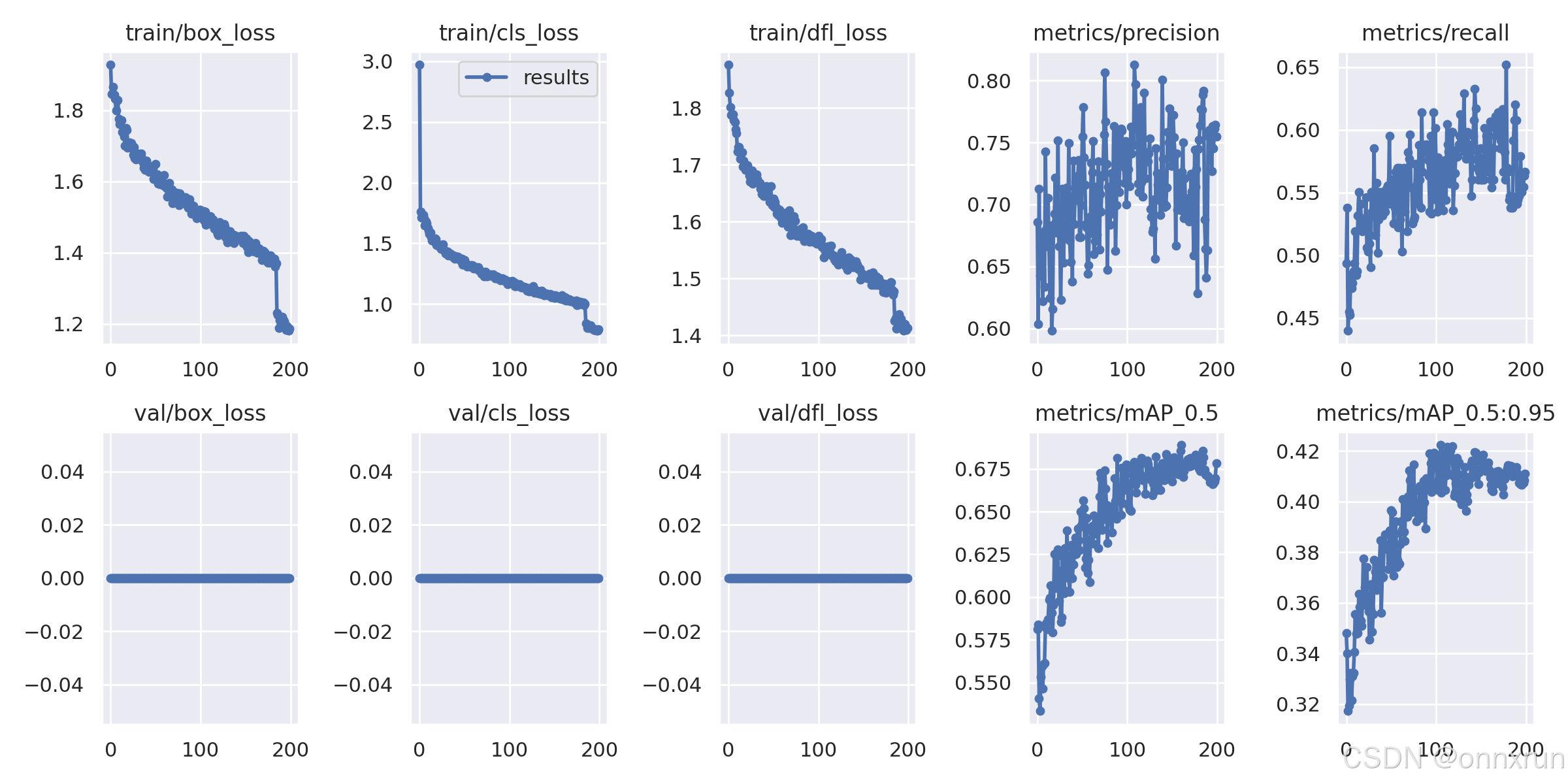
从图中可以看出,模型在训练过程中逐渐收敛,准确率等指标逐步提升。你可以根据这些曲线调整训练参数或优化模型结构,以获得更好的性能。
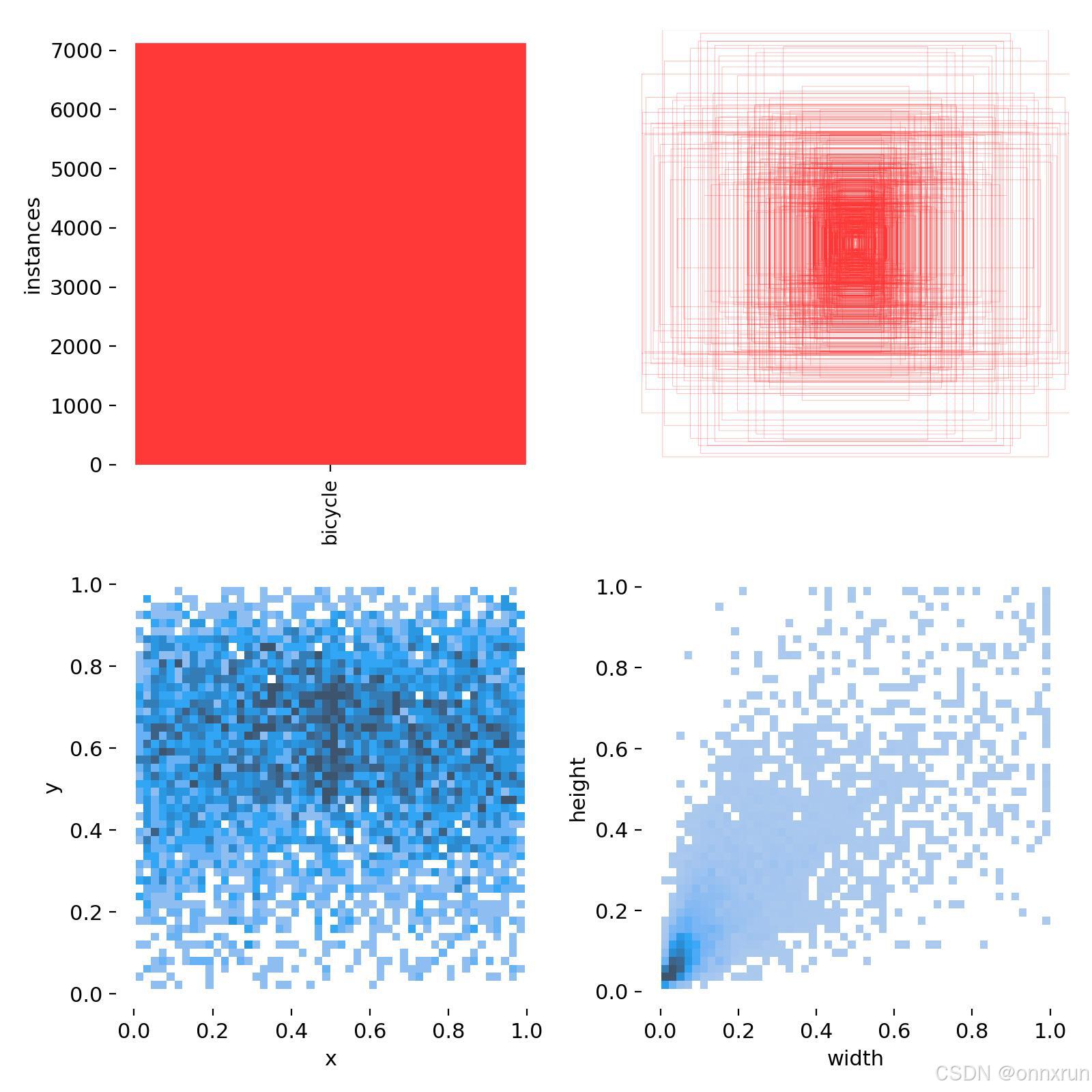
自行车标签分布可视化图
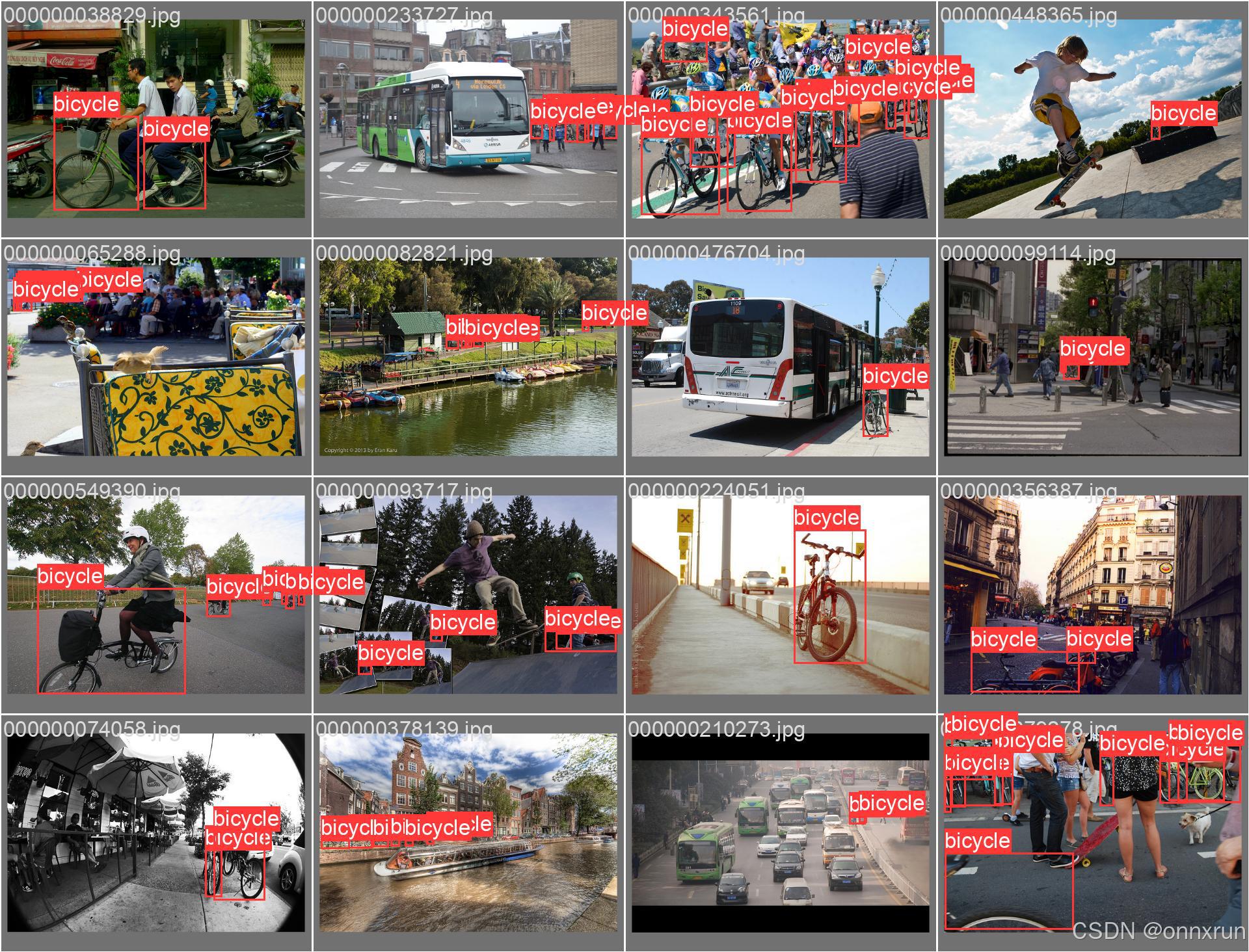
训练集验证集效果图;
YOLOv8的识别检测效果图


- YOLOv9实现源码:项目完整源码及教程-点我下载
- 数据集:自行车识别检测数据集1901张带xml和txt标签-点我下载
- YOLOv8实现带GUI界面源码:项目完整源码及教程-点我下载
- YOLOv8实现不带GUI源码:项目完整源码及教程-点我下载
结论
本文详细介绍了基于YOLOv9的自行车检测系统的Python源码、运行教程、训练好的模型以及评估指标曲线。该系统能够实时检测视频或图像中的自行车,并识别其是否违停,为城市交通管理提供了智能化解决方案。希望读者能够通过本文快速上手该系统,并在自行车违停项目的开发中取得良好的效果。
注意:以上文章内容为示例模板,具体实现细节、代码路径、数据集格式等需要根据实际情况进行调整。此外,由于YOLOv9的实现可能随着版本更新而发生变化,请参考最新的官方文档或相关资源。在实际应用中,你可能还需要根据具体需求对代码进行扩展和优化。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 基于YOLOv9实现的自行车检测系统:为共享自行车违停项目开发(附项目源码及数据集下载)

发表评论 取消回复