Abstract
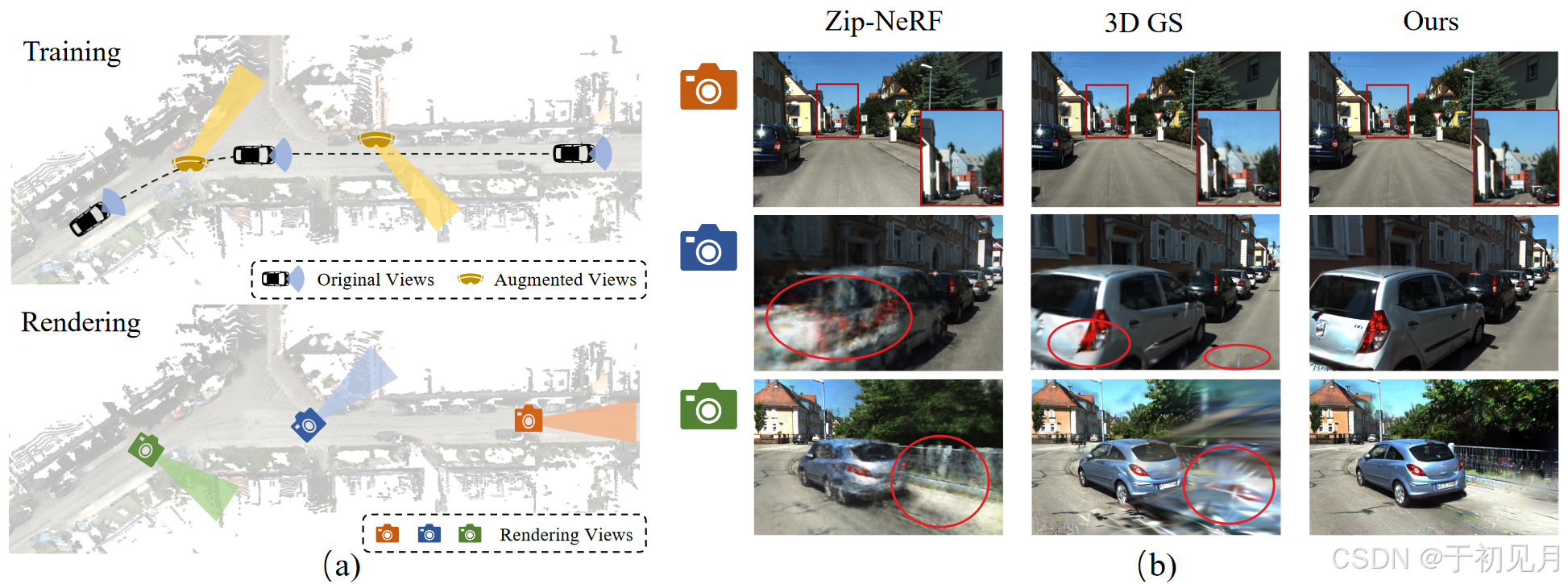
Novel View Synthesis for street scenes play a critical role in the autonomous driving simulation. The current mainstream technique to achieve it is neural rendering, such as NeRF and 3DGS. Although thrilling progress has been made, when handling street scenes, current methods struggle to maintain rendering quality at the viewpoint that deviates significantly from the training viewpoints. This issue stems from the sparse training views captured by a fixed camera on a moving vehicle.
To tackle this problem, we propose a novel approach that enhances the capacity of 3DGS by leveraging prior from a Diffusion Model along with complementary multi-modal data.
Firstly, we fine-tune a Diffusion Model by adding images from adjacent frames as condition, meanwhile exploiting depth data from LiDAR point clouds to supply additional spatial information.
Then we apply the Diffusion Model to regularize the 3DGS at unseen views during training.
Experimental results validate the effectiveness of our method compared with current SOTA models, and demonstrate its advance in rendering images from broader views.
Figure
Figure 1
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » SGD: Street View Synthesis with Gaussian Splatting and Diffusion Prior

发表评论 取消回复