数据部分:
数据要求
(1)每条行带至少从 3 个不同的视角进行拍摄。
(2)相邻相片之间的重叠度通常要求大于三分之二。
(3)不同拍摄视角之间夹角应该少于 15 度。
(4)通常航向重叠要求 80%重叠度,旁向重叠要求 50%。
对于原始相片不要做更改尺度、裁剪、旋转、去噪、锐化、调整对比度等操作。
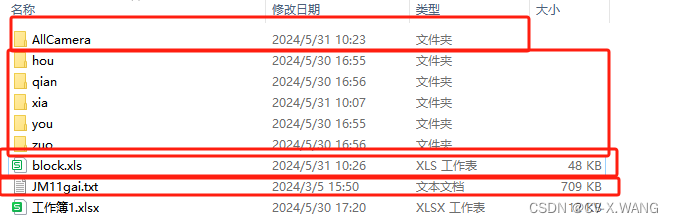
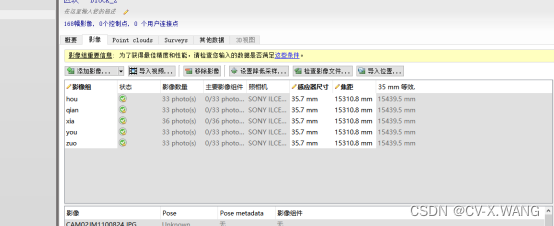
基于五镜头的数据,首先是要将五镜头拍摄的图片放到一个文件夹内,即图片上的AllCamera,其次是还要有POS数据,即图片内的JM11,最后还要建立测区信息表,图中的block.xls。
数据准备及处理
首先创建一个空的xls表格,可以起名为block.xls,在该文件下新建四个工作表分别为Photogroups\Photos\ControlPoints\Options,如下图所示,

- 打开Photogroups工作表,表头分别设置为 Name(分组名)、Width(影像宽度)、Height(影像高度)、FocalLength(相机焦距)、PixelSize(像素尺寸)、PrincipalPointXmm(像主点 x 值)、PrincipalPointYmm(像主点 Y 值)、CameraOrientation(相机方向)。这些可以通过所给的相机检校文件查看,相机方向,默认为 XDownYRight。对每一组均要设置,下图所示是采用五镜头数据,分五组设置。
-
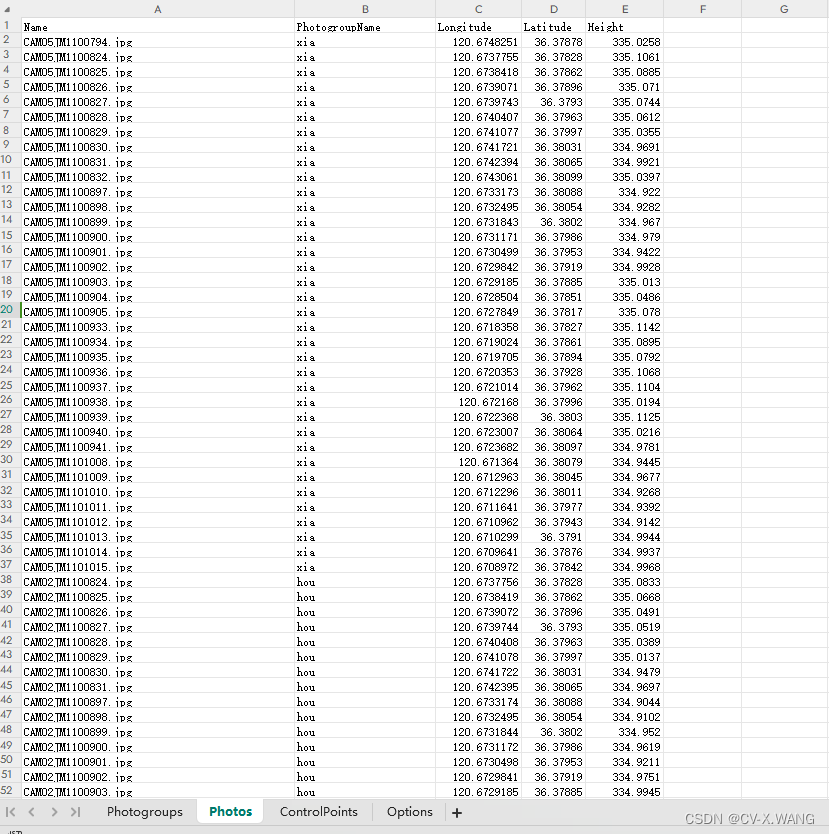
打开Photos表,表头分别设置为 Name(影像名)、PhotogroupName(分组名)、Longitude(经度)、Latitude(纬度)、Height(高程)、Phi(航像倾角)、Omega(旁向倾角)、Kappa(旋偏角)。这几个参数可以在POS数据的文本文件里找到。由于无人机的POS数据里的角度信息不准确因而只填POS数据里的位置信息就好(需要注意的是,分组名与上一个表头的分组名对应,把属于该组的影像的分组名都设置成一样。)
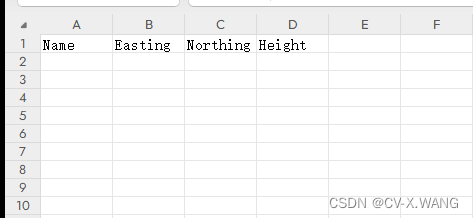
- 打开 ControlPoints 表,表头分别设置为 Name(控制点点号)、Easting(控制点经度)、Northing(控制点纬度)、Height(控制点高程)。由于实验所用的数据无控制点,因而这些参数可不填写,但表头不能省去。
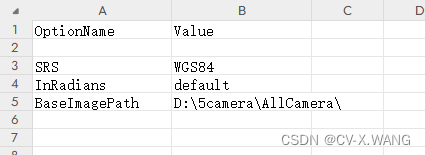
- 最后打开 Options 表,填写所对应的参数。SRS是指为WGS84,InRadians:是否是弧度,设置成 default,BaseImagePath 填写影像所在文件夹路径。

工程操作
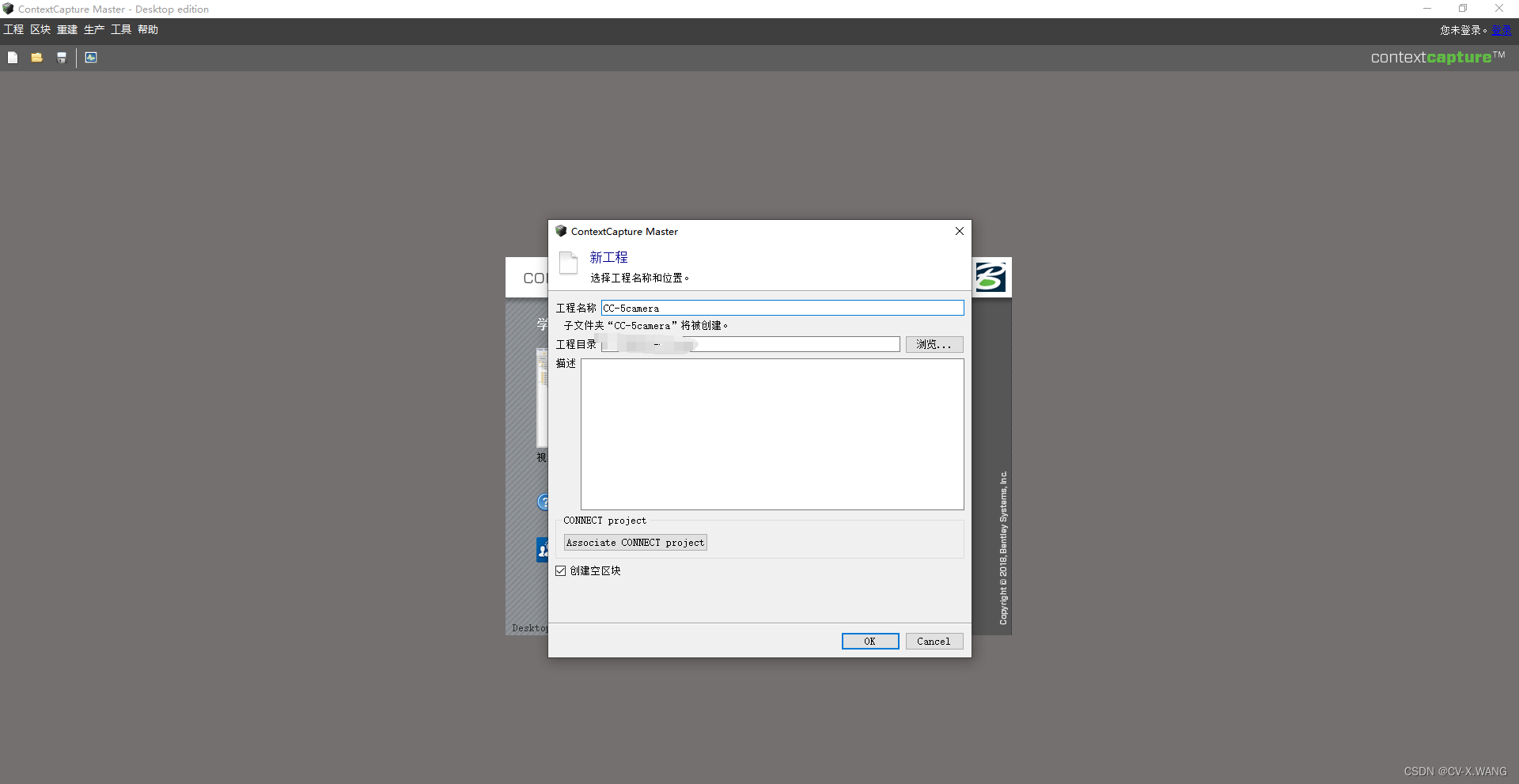
1.新建工程
2.导入区块
导入之前数据准备创建好的 block.xls文件
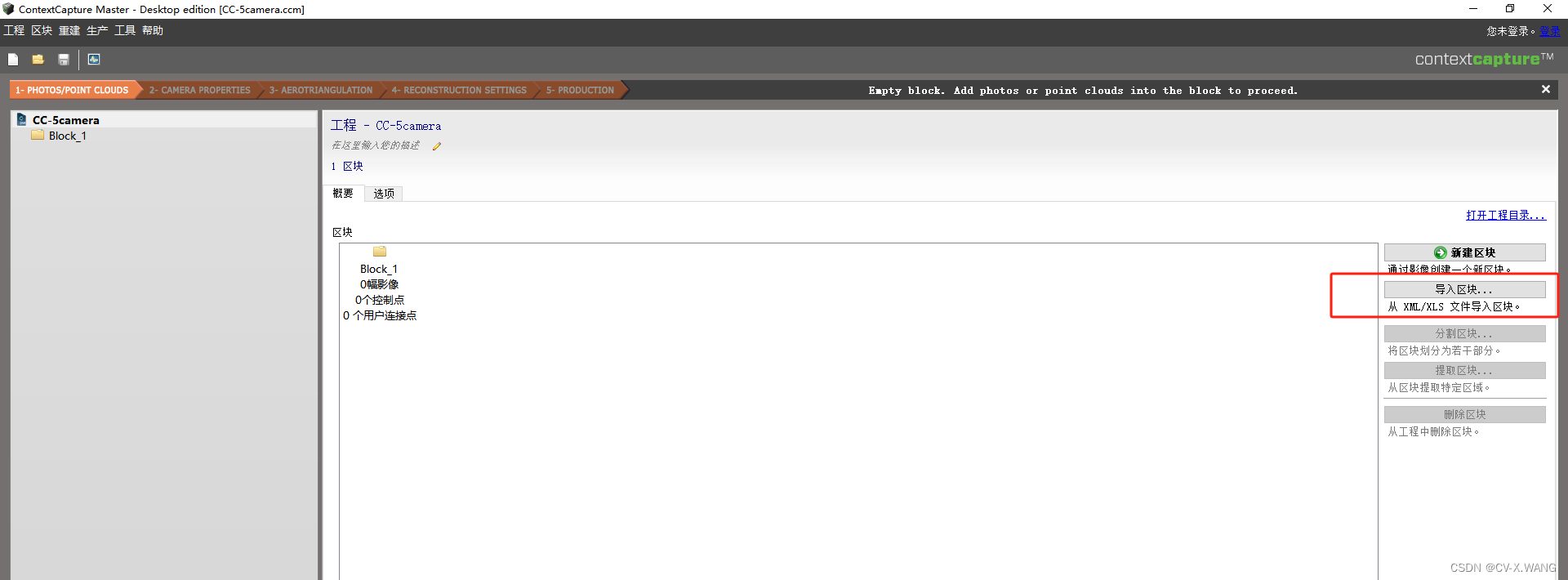
将数据导入进来
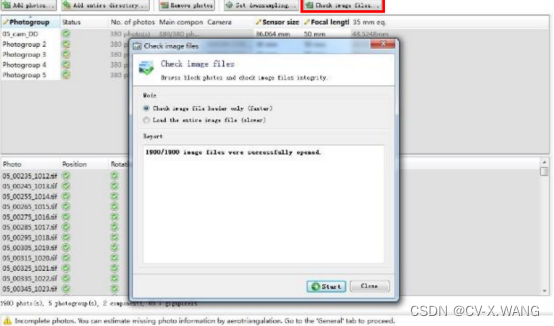
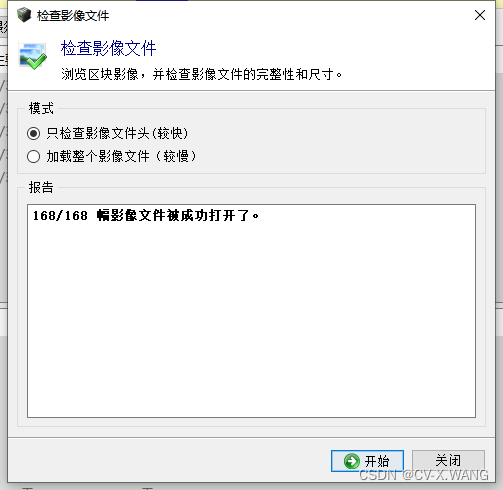
3.检查图像文件
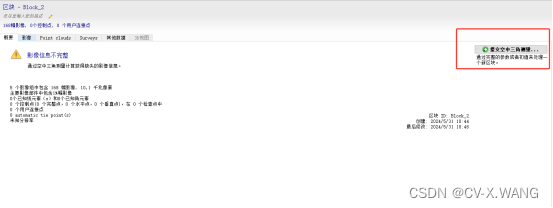
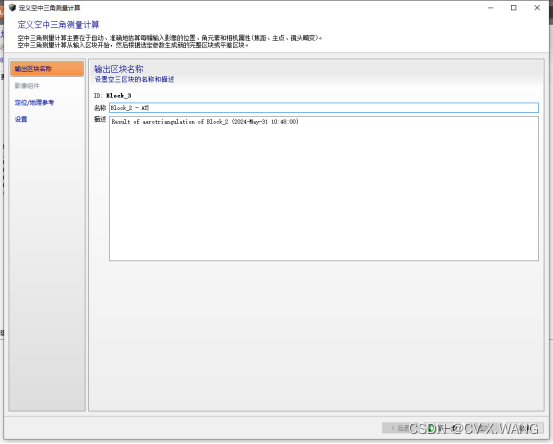
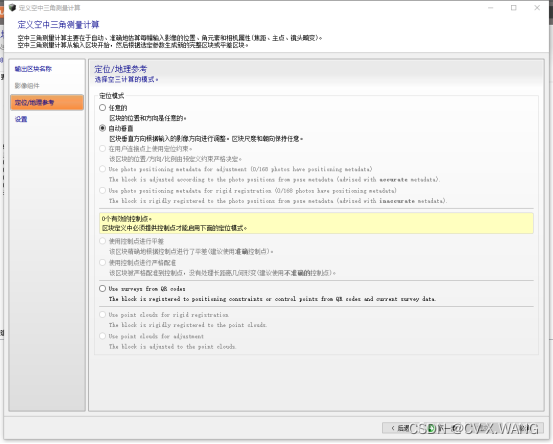
4.图像文件无问题后,进行空三测量

点击“提交”之后,会出现如下提示:
此时需要打开ContextCapture Engine

等待空三运算结束
未完待续......
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 【详细 工程向】基于Smart3D的五镜头相机三维重建

发表评论 取消回复