目录
一. 引言
最近发现了之前仿真中的一个问题,记录一下备忘。
Matlab function中有时候需要用到全局变量,其用法较为简单,而Simulink中的Matlab function全局变量用法稍复杂一点,按照步骤来即可,但第一次用还是需要一个详细教程,以免出错。
二. 普通Matlab function使用全局变量
普通Matlab function全局变量定义:
function W = weight(m)
global GG;
W = m * GG;
将上述代码保存成文件weight.m.
注意调用的时候也要声明全局变量:
global GG;
GG = 10;
a = weight(4)
三. Simulink中的Matlab function使用全局变量
详细的多种用法参考这篇文章: Simulink高级应用—— Matlab Function中共享或使用全局变量或全局数据
这里只说其中一种用法,使用data sotre memory来实现全局变量共享。
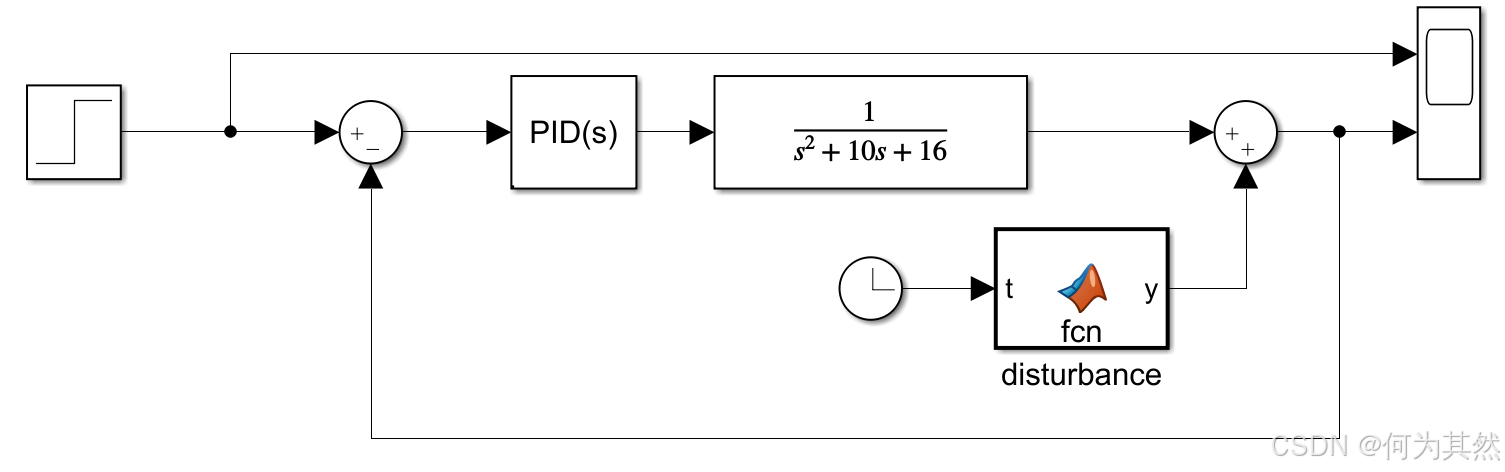
比如我这里要给控制器输出端加一个噪音信号,用Matlab function,就可以定义为时间的函数。
1. MATLAB Function的代码中 声明全局变量
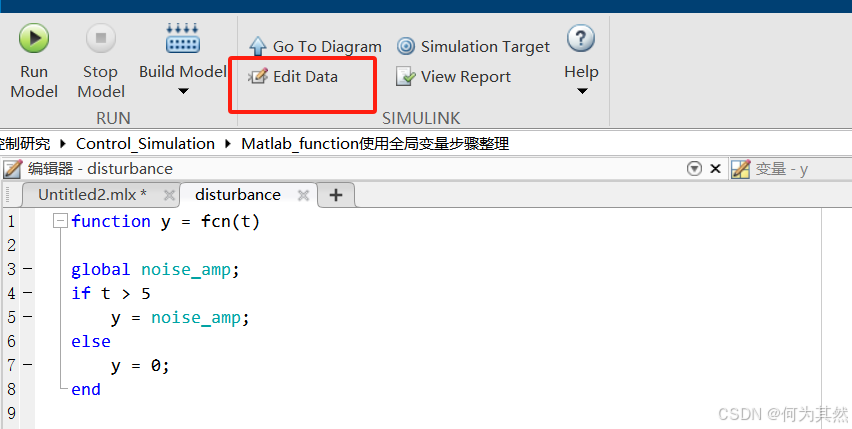
考虑最简单的情况,t=5s时加一个幅值为noise_amp的噪音,定义:
function y = fcn(t)
global noise_amp;
if t > 5
y = noise_amp;
else
y = 0;
end
2. MATLAB Function 注册全局变量
在MATLAB Function的代码编辑界面,点击Edit Data
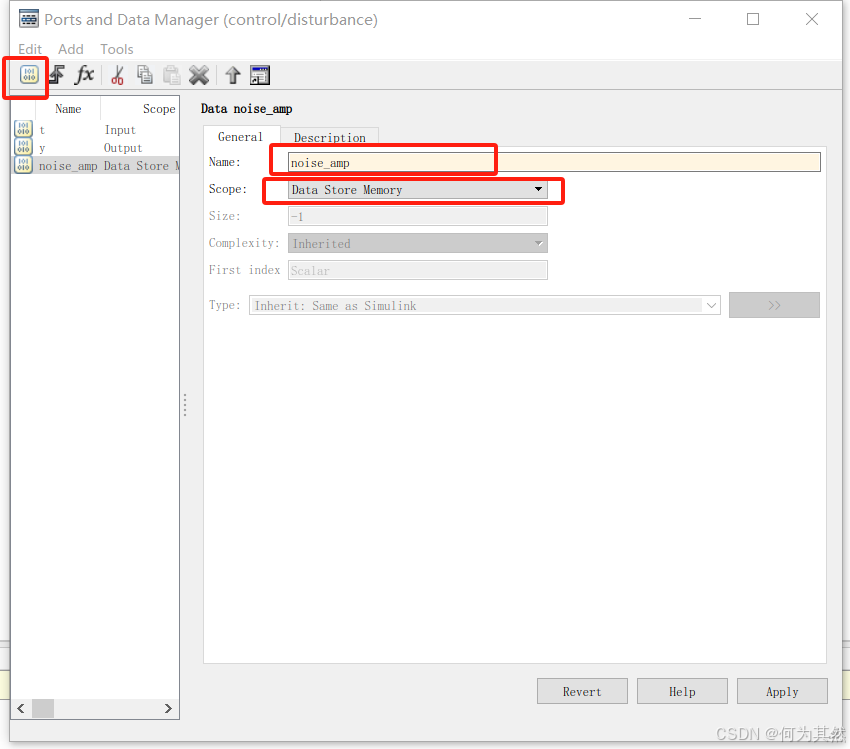
点击Add Data,成功添加一个变量,命名为noise_amp(与代码中的必须一致)。变量类型由input改为data store memory
3. Simulink中添加 Data Store Memory模块
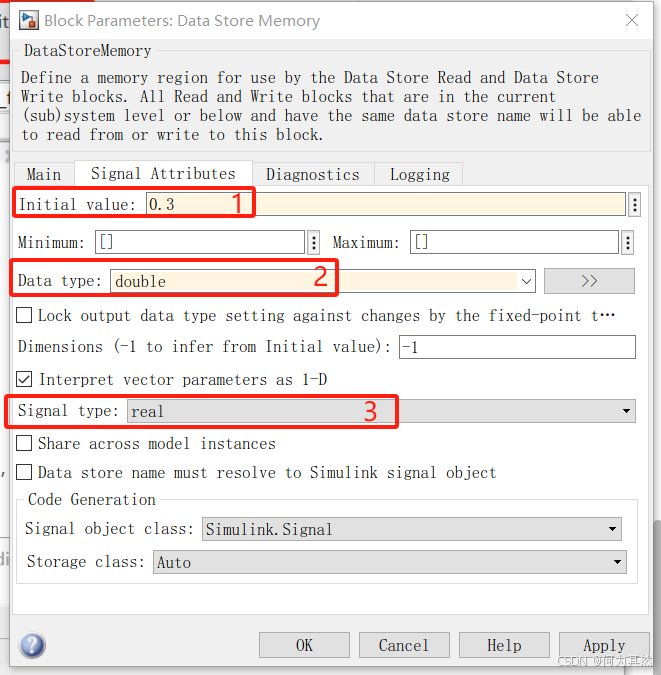
从library中拖入或直接在空白页面输入Data Store Memory,添加一个Data Store Memory模块。命名与Matlab function中一致,必须设置好明确的数据类型,不能为auto(比如我设置成double)。设置信号的类型(real)和初始值。我这里设置的初始值0.3,即噪音幅值0.3
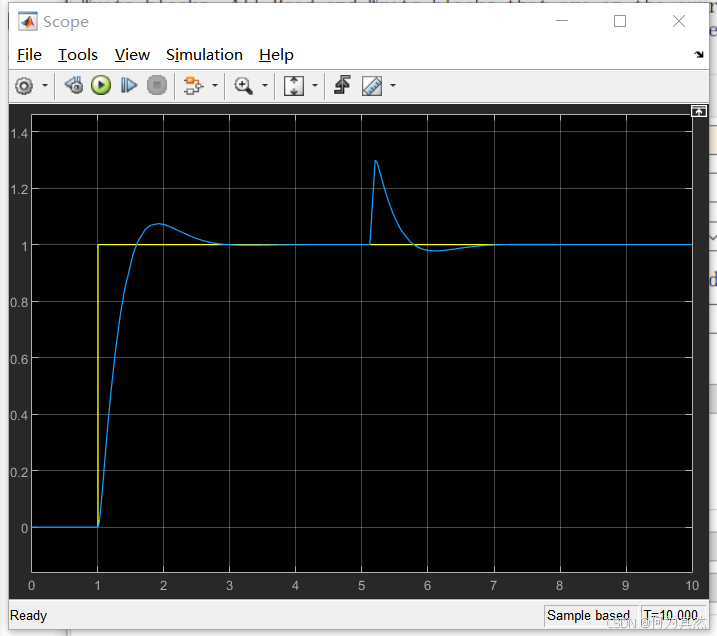
现在运行一下,结果如图所示。可以看到t=5s时直接在输出端叠加了一个0.3的噪音,之后在PID的调节下回到设置的期望值1。这样就仿真了一个脉冲形式的抗扰控制。
四. 如何利用Matlab function的全局变量施加随机噪声
上面是在某一时刻施加了一个噪音,现在我想以10Hz频率给输出端施加随机噪音(控制周期为0.001s, 1000Hz),应该怎么施加。
这个问题乍一看很简单,其实仔细想一想不是那么简单。比如下面这这么写就是错的:
function y = fcn(t,u)
if mod(1000*t,100) == 0 % 噪声频率为0.1s给一次, 仿真周期是0.001s
y = 0.1 * (-1+2*rand);
else
y = 0;
end
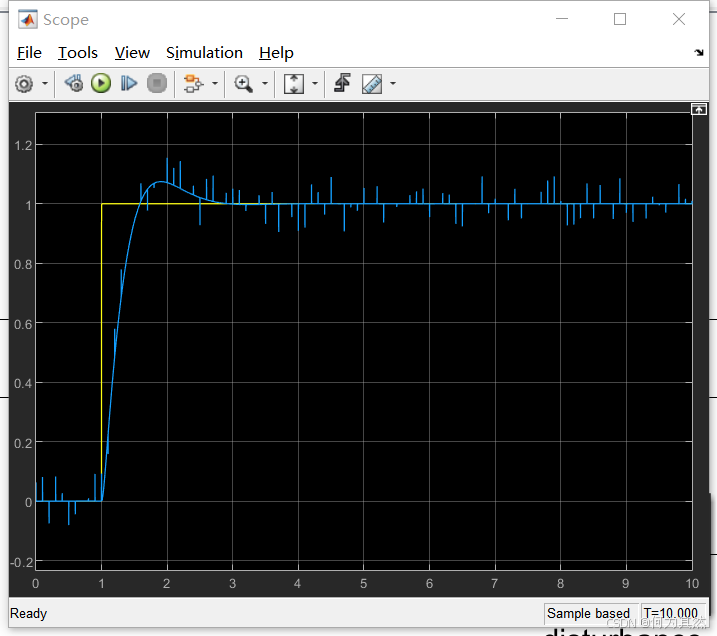
它仿真出来的是下图形式,每一次的噪音只在那一时刻起了作用,表现在输出信号上就是一个个的“尖刺”,实际上每一次施加的噪音都应该是持续性的,所以应该用累加形式。
正确的写法如下(新定义了一个全局变量noise,步骤参照前面):
function y = fcn(t, data1)
global noise;
if mod(1000*t,100) == 0 % 噪声频率为0.1s给一次, 仿真周期是0.001s
y = noise + 0.1 * (-1+2*rand);
else
y = noise;
end
noise = y;
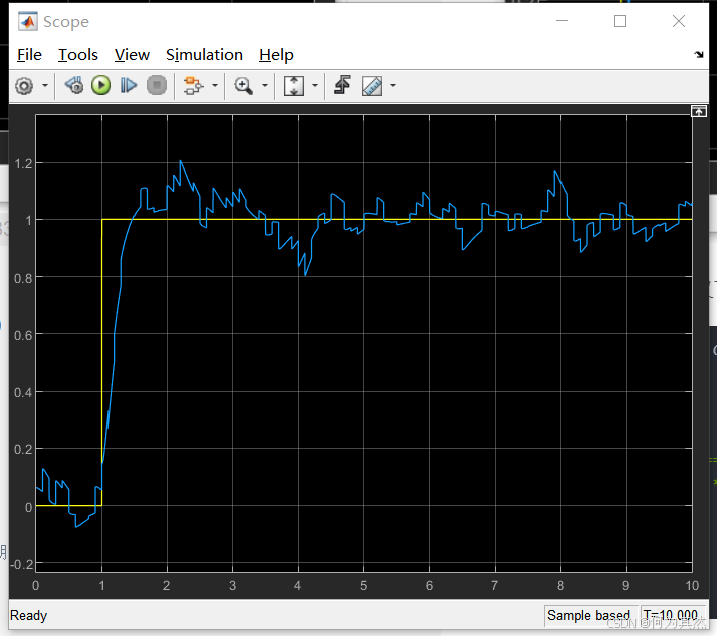
这样子输出就是下面这样的,可以看到是连续信号(只演示原理,控制效果忽略~)。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » Simulink中Matlab function使用全局变量

发表评论 取消回复