个人博客:https://alive0103.github.io/
备用博客:http://139.155.27.201/ (服务器,备案ing,不稳定,心情不好会挂掉)
欢迎来逛逛哇~
1.实验背景与目的
(1)实验背景
最短路径问题是图论中重要的经典问题之一,广泛应用于交通网络、路由选择、物流调度等场景。Dijkstra 算法是求解单源最短路径的著名算法之一,通常用于加权有向图且权重为非负数的情况。该算法的效率在很大程度上依赖于优先队列的性能,因此在不同实现的优先队列下,算法的时间和空间复杂度也有所不同。
(2)实验目的
比较在不同优先队列(Binary Heap、Multiway Heap)实现下 Dijkstra 算法的性能差异。本次实验研究不同维度的多路堆对算法效率的影响,从而分析选择合适优先队列的意义。通过多次实验测量运行时间和内存占用情况,验证并评估不同实现的实际表现。
2.实验内容
(1)实现Dijkstra算法
基于加权有向图数据结构,编写Dijkstra算法的实现类DijkstraSP,使用优先队列管理候选节点并执行放松操作。
(2)实现多种优先队列
Binary Heap(IndexMinPQ):二叉堆的优先队列实现。
Multiway Heap(IndexMultiwayMinPQ):支持多个子节点的多路堆优先队列,并允许自定义维度 d。
(3)实验设计与运行
使用不同优先队列类型(Binary、Multiway(d=3)、Multiway(d=4))运行 Dijkstra 算法。
测量每种配置下的运行时间和内存使用。
结果分析与总结:对实验结果进行分析,包括各配置下的运行效率和资源占用情况。
3. 代码实现与原理
(本博客思路仅供参考,禁止抄袭代码,否则后果自负,在此给出相关编写方法和伪代码,可运行代码将于2024年12月31日后更新)
3.1 DijkstraSP类
(1)原理
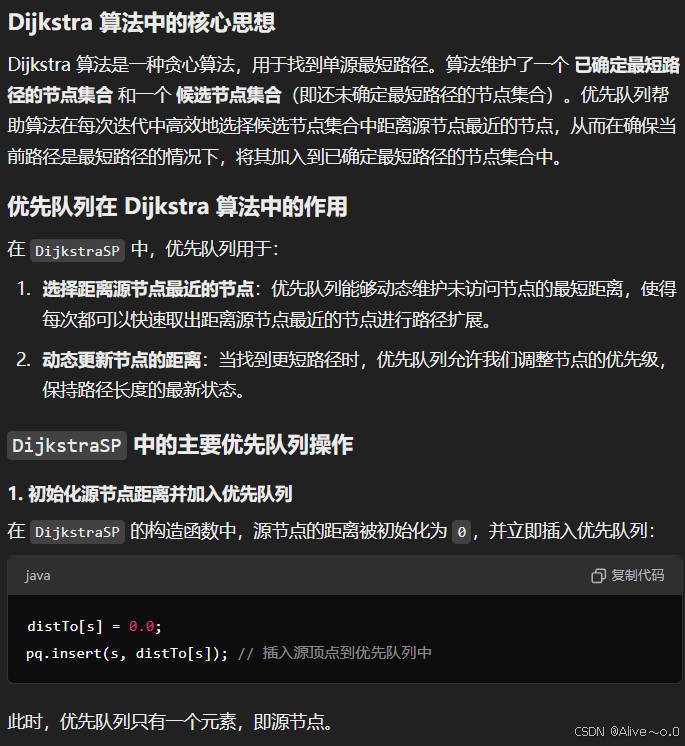
DijkstraSP 类实现了 Dijkstra 算法的核心逻辑。算法的核心思想是通过维护源点到各节点的最短路径长度,不断从未访问节点集合中选择当前最短路径的节点进行扩展。
(2)关键代码说明
1.初始化源节点:将源节点距离初始化为 0,其他节点距离为正无穷。
2.优先队列操作:优先队列的主要操作包括:
- insert(s, distTo[s]):将源节点 s 插入优先队列。
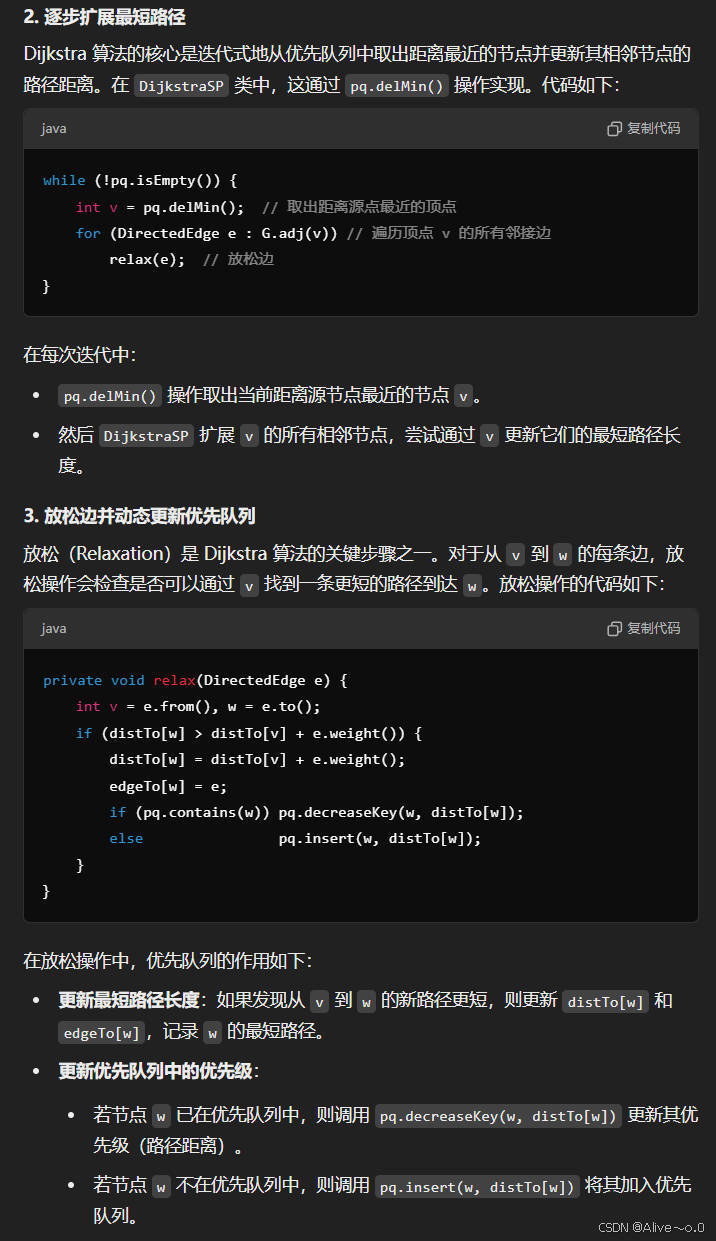
- delMin():取出当前距离源节点最近的节点。
- decreaseKey():若发现更短路径,更新节点优先级。
3.放松操作:检查是否可以通过某条边找到更短路径并更新邻接节点的路径长度。
public class DijkstraSP {
private double[] distTo;
private DirectedEdge[] edgeTo;
private IndexMinPQ<Double> pq; // 使用二叉堆优先队列
public DijkstraSP(EdgeWeightedDigraph G, int s) {
distTo[s] = 0.0;
pq.insert(s, distTo[s]);
while (!pq.isEmpty()) {
int v = pq.delMin();
for (DirectedEdge e : G.adj(v))
relax(e);
}
}
private void relax(DirectedEdge e) {
int v = e.from(), w = e.to();
if (distTo[w] > distTo[v] + e.weight()) {
distTo[w] = distTo[v] + e.weight();
edgeTo[w] = e;
if (pq.contains(w)) pq.decreaseKey(w, distTo[w]);
else pq.insert(w, distTo[w]);
}
}
}
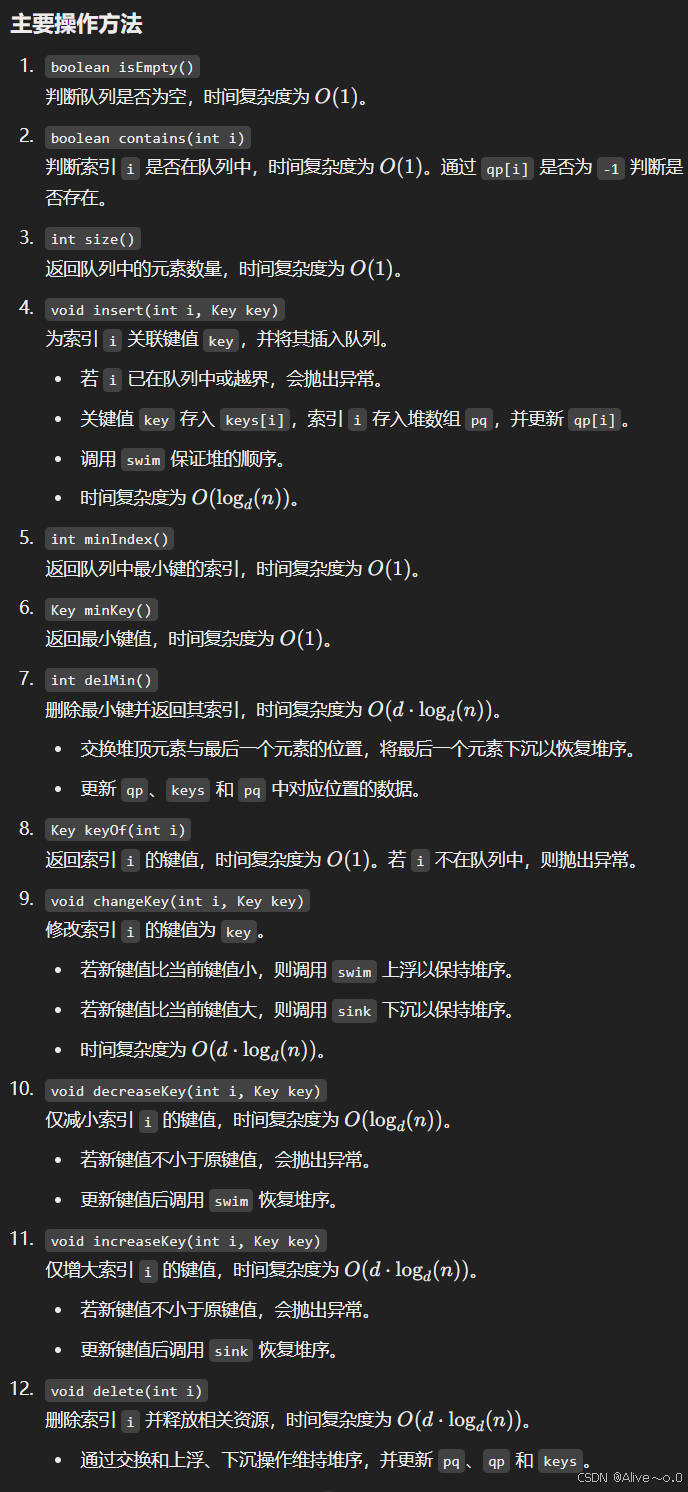
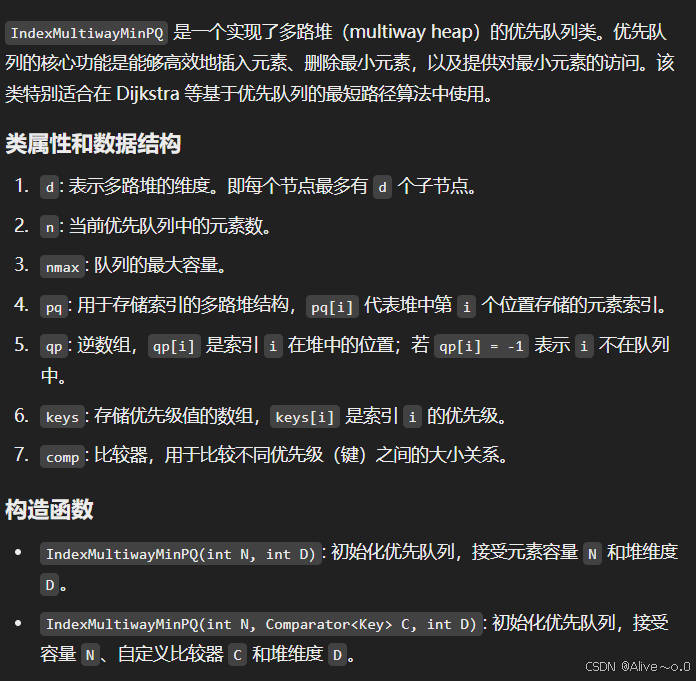
3.2 IndexMultiwayMinPQ类
(1)原理
IndexMultiwayMinPQ 实现了多路堆优先队列,允许设定堆的维度d,使得每个节点最多拥有d个子节点。理论上,多路堆可以减少堆的高度,从而降低插入和删除最小值的操作复杂度。
(2)代码片段
public class IndexMultiwayMinPQ<Key> {
private final int d; // 堆的维度
private int[] pq; // 堆数组
private int[] qp; // 逆数组
private Key[] keys; // 优先级数组
public IndexMultiwayMinPQ(int N, int D) {
this.d = D;
pq = new int[N + D];
qp = new int[N + D];
keys = (Key[]) new Comparable[N + D];
}
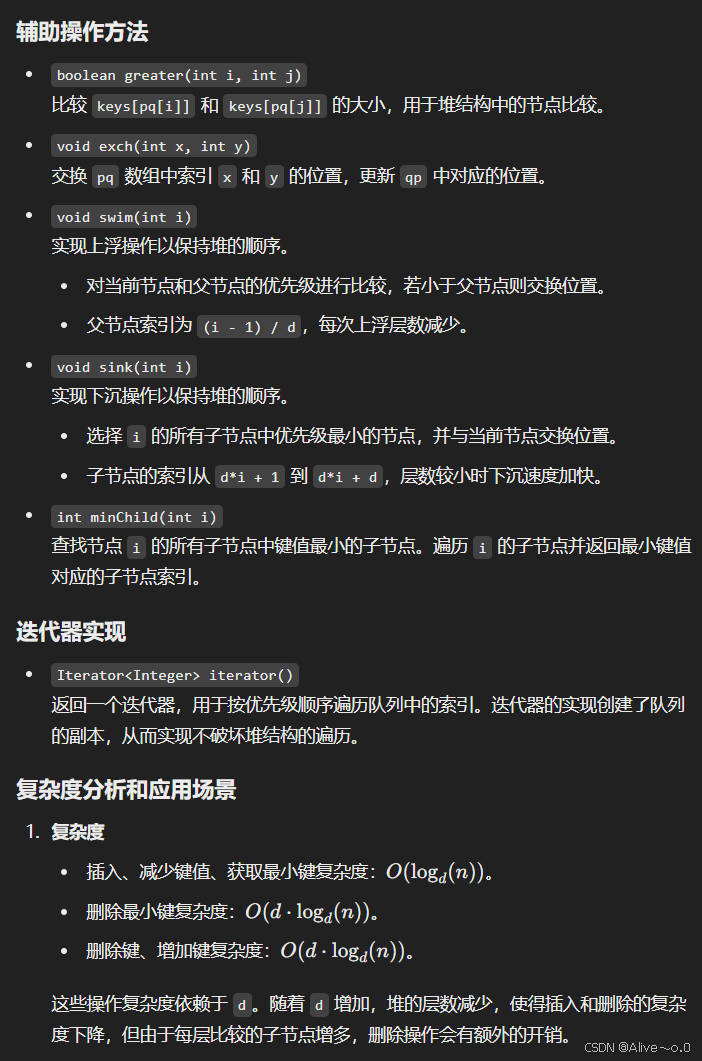
private void swim(int i) {
while (i > 0 && greater((i - 1) / d, i)) {
exch(i, (i - 1) / d);
i = (i - 1) / d;
}
}
private void sink(int i) {
while (d * i + 1 < n) {
int j = minChild(i);
if (!greater(i, j)) break;
exch(i, j);
i = j;
}
}
}
3.3 EdgeWeightedDigraph类
EdgeWeightedDigraph管理了图的顶点和边以及每条边的权重。该类使用邻接表存储各顶点的邻接边,从而使边的管理和遍历更加高效。以下是代码的逻辑和关键代码的简述:
(1)构造方法
EdgeWeightedDigraph(int V):初始化一个包含 V 个顶点且没有边的空图。
EdgeWeightedDigraph(int V, int E):创建包含 V 个顶点、E 条随机边的图。
EdgeWeightedDigraph(In in):从输入流中读取顶点和边的定义并构建图。
EdgeWeightedDigraph(EdgeWeightedDigraph G):通过深拷贝另一个图 G 来创建新的图对象。
(2)添加和获取方法
addEdge(DirectedEdge e):将有向边 e 添加到图中,并更新邻接表和入度数组。
adj(int v):返回与顶点 v 相连的所有有向边。
indegree(int v) 和 outdegree(int v):分别返回顶点 v 的入度和出度。
edges():返回图中的所有有向边集合。
public Iterable<DirectedEdge> edges() {
Bag<DirectedEdge> list = new Bag<DirectedEdge>();
for (int v = 0; v < V; v++) {
for (DirectedEdge e : adj(v)) {
list.add(e); // 将每条边添加到集合中
}
}
return list;
}
3.4 DijkstraSPMap类
(1)从文件读取数据并初始化图
1.文件读取和顶点、边信息解析:函数从文件中读取顶点和边的数量,初始化一个带权有向图 EdgeWeightedDigraph。
- 时间复杂度:假设文件中包含 V 个顶点和 E 条边,则读取数据的时间复杂度约为 O(V+E)。
- 空间复杂度:图结构和数据存储使用 O(V+E) 的空间,顶点数和边数均会影响内存需求。
2.存储顶点的坐标:使用 HashMap 将每个顶点的编号与其坐标(x 和 y)关联,以便计算边的权重(距离)。
- 时间复杂度:使用 HashMap 插入 V 个顶点坐标,时间复杂度约为 O(V)。
- 空间复杂度:HashMap 中存储了 V 个顶点的坐标信息,空间复杂度为 O(V)。
3.构建边和计算边权重:读取边信息,并根据顶点坐标计算每条边的权重(使用欧几里得距离)。边的权重计算完毕后,通过 addEdge 方法将边加入到图中。
- 时间复杂度:对于每条边进行一次距离计算和插入操作,总时间复杂度为 O(E)。
- 空间复杂度:邻接表存储 E 条边,空间复杂度为 O(E)。
(2)执行 Dijkstra 算法
1.选择优先队列类型:根据输入参数 pqType,函数选择使用 binary 或 multiway(多路堆)作为优先队列实现来执行 Dijkstra 算法。
- 二叉堆:当 pqType 为 binary 时,选择 D=2 的多路堆,相当于一个二叉堆。
- 多路堆:当 pqType 为 multiway 时,函数使用指定的 D 值作为多路堆的维度。
2.Dijkstra 算法的执行:基于选择的优先队列类型,创建 DijkstraSP 对象并计算最短路径。
- 时间复杂度:Dijkstra 算法的复杂度主要依赖于优先队列操作。对于二叉堆实现,时间复杂度是 O((V+E)logV);对于多路堆,时间复杂度与 D 相关,较大的 D 可以减少树的高度,但单次插入和删除操作的时间会增大。
- 空间复杂度:优先队列存储了图中顶点和边的路径信息,其空间复杂度约为 O(V+E)。
(3)记录结束时间和内存使用
executionTime:算法总执行时间,计算方法为 endTime - startTime,单位为毫秒。
memoryUsed:算法执行过程中实际使用的内存,通过 endMemory - startMemory 计算(单位为 MB)。这里将字节转换为 MB 方便展示。
4.结果分析
(1)数据
对 binary 和 multiway (d=3 和 d=4) 队列类型下的Dijkstra算法分别进行了运行,记录了它们的执行时间和内存使用情况。结果如下:
| 优先队列类型 | 执行时间(毫秒) | 内存使用(MB) |
|---|---|---|
| Binary Heap | 699 | 10 |
| Multiway Heap (d=3) | 567 | 11 |
| Multiway Heap (d=4) | 298 | 11 |
(2)分析
1.执行时间:实验结果显示,multiway 优先队列的执行时间随维度 d 的增加而减小。这是因为随着 d 的增大,堆的高度降低了,使得 insert 和 delMin 操作变得更快。
2.内存使用:d=3 的多路堆使用了最多的内存,而 d=4 内存使用最少。这可能是由于更大的维度导致了更高的内存利用率,尤其是在降低堆高度和优化数组访问时,使堆结构更紧凑。
3.比较:多路堆在执行时间方面有显著优势,尤其是在更大维度的设置下,但内存消耗也需要权衡。因此,如果对内存使用要求较高,d=4 是较优的选择。
(3)复杂度
插入、减少键值、获取最小键复杂度: O ( d ⋅ log d ( n ) ) O(d\cdot\log_d(n)) O(d⋅logd(n))。
删除最小键复杂度: O ( d ⋅ log d ( n ) ) O(d\cdot\log_d(n)) O(d⋅logd(n))。
删除键、增加键复杂度: O ( d ⋅ log d ( n ) ) O(d\cdot\log_d(n)) O(d⋅logd(n))。
随着d增加,堆的层数减少,使得插入和删除的复杂度下降,但由于每层比较的子节点增多,删除操作会有额外的开销。
5.总结
本实验展示了不同优先队列实现对 Dijkstra 算法的性能影响。通过实验结果可以得出以下结论:
1.在执行时间方面,multiway 优先队列优于 binary 优先队列,且多路堆的维度越大,性能提升越显著。
2.在内存消耗方面,multiway 的内存需求在 d=3 时显著高于 d=4,更大的维度反而有助于降低内存开销。
3.实际应用中应根据具体需求选择合适的优先队列。对于需要频繁操作大量节点的场景,多路堆(d=4)是一种较优选择,可以在性能和内存占用之间取得平衡。
6. 收获与反思
(1)收获
通过本实验,我掌握了如何在 Dijkstra 算法中使用优先队列优化性能。深入理解了多路堆的结构与操作的细节,进一步加深了对数据结构效率和算法实现之间关系的理解。同时,学习到如何通过实验数据分析来验证和总结算法的效率。
(2)反思
在实验过程中,我发现提高维度虽然可以减少堆高度,但会增加每层的子节点数,这在实际场景中需要动态调整以平衡时间和内存的需求。
一些其他的参考:
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 算法4:实验三——地图路由(多路优先队列)

发表评论 取消回复