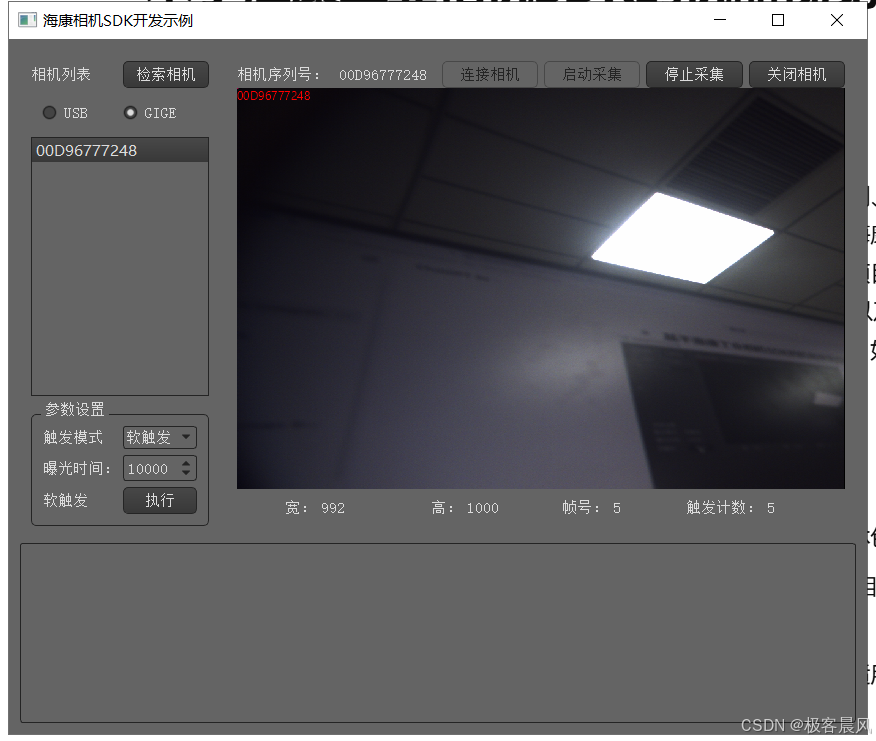
本文将梳理一个基于 Qt 和 OpenCV 实现的海康相机图像采集 Demo。该程序能够实现相机连接、参数设置、图像采集与显示、异常处理等功能,并通过 Qt 界面展示操作结果。
1. 功能概述
该程序使用 Qt 的 GUI 作为界面,OpenCV 作为图像处理库,通过海康 MVS SDK 完成对相机的控制。主要功能包括:
- 相机连接和设置
- 参数调整(如曝光时间和触发模式)
- 图像采集与显示
- 异常处理(如设备断开)
2. 初始化与 GUI 设置
2.1 初始化 GUI
在 MainWindow 的构造函数中进行界面初始化,包括设置按钮的可见性、禁用状态等。 initStyle() 函数用于加载和应用界面的样式表。
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent), ui(new Ui::MainWindow) {
ui->setupUi(this);
initStyle();
// 设置初始 UI 状态
ui->btn_Start->setEnabled(false);
ui->btn_Stop->setEnabled(false);
ui->btn_close->setEnabled(false);
ui->btn_Grab->setVisible(false);
ui->groupBox->setEnabled(false);
}
3. 相机连接与操作
3.1 枚举和连接相机
程序通过点击按钮搜索连接的相机设备,并显示在列表中。使用 MV_CC_EnumDevices 函数枚举设备,再通过 MV_CC_CreateHandle 和 MV_CC_OpenDevice 创建并打开相机句柄。
void MainWindow::on_btnSeachCamera_clicked() {
ui->listWidget->clear();
int nRet = MV_OK;
bool isGige = ui->radioGIGE->isChecked();
// 枚举 PC 连接的所有相机
if (isGige) {
if (MV_OK != (nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE, &cameraList))) {
setLastErrorMsg(tc("未找到可用网口相机, 错误码: %1").arg(nRet));
}
} else {
if (MV_OK != (nRet = MV_CC_EnumDevices(MV_USB_DEVICE, &cameraList))) {
setLastErrorMsg(tc("未找到可用 USB 相机, 错误码: %1").arg(nRet));
return;
}
}
// 将相机序列号添加到列表
for (int i = 0; i < cameraList.nDeviceNum; i++) {
const char *serial = isGige
? reinterpret_cast<char *>(cameraList.pDeviceInfo[i]->SpecialInfo.stGigEInfo.chSerialNumber)
: reinterpret_cast<char *>(cameraList.pDeviceInfo[i]->SpecialInfo.stUsb3VInfo.chSerialNumber);
ui->listWidget->addItem(serial);
}
}
3.2 相机参数设置
通过调用 MV_CC_SetExposureTime 和 MV_CC_SetEnumValue 设置曝光时间和触发模式。使用 Qt 的信号和槽机制,使得调整触发模式和曝光时间变得更加便捷。
void MainWindow::on_comboBox_activated(int index) {
int nRet = MV_OK;
switch (index) {
case OpenContinue:
nRet = MV_CC_SetEnumValue(m_handle, "TriggerMode", 0); // 连续采集
break;
case OpenSoftWare:
nRet = MV_CC_SetEnumValue(m_handle, "TriggerMode", 1); // 软件触发模式
if (MV_OK == nRet) nRet = MV_CC_SetEnumValue(m_handle, "TriggerSource", 7);
break;
case OpenHardWare:
nRet = MV_CC_SetEnumValue(m_handle, "TriggerMode", 1); // 硬件触发模式
if (MV_OK == nRet) nRet = MV_CC_SetEnumValue(m_handle, "TriggerSource", 0);
if (MV_OK == nRet) nRet = MV_CC_SetEnumValue(m_handle, "TriggerActivation", 0);
break;
}
if (MV_OK != nRet) {
setLastErrorMsg(tc("设置触发模式失败, 错误码: %1").arg(nRet));
}
}
4. 图像采集与显示
4.1 图像采集回调
通过注册图像回调函数 ImageCallBack,将采集到的图像数据转换为 OpenCV 的 cv::Mat 格式,然后显示在 Qt 的 QLabel 中。
void ImageCallBack(unsigned char *pData, MV_FRAME_OUT_INFO_EX *pFrameInfo, void *pUser) {
MainWindow *camera = static_cast<MainWindow *>(pUser);
cv::Mat srcImage;
switch (pFrameInfo->enPixelType) {
case PixelType_Gvsp_Mono8:
srcImage = cv::Mat(pFrameInfo->nHeight, pFrameInfo->nWidth, CV_8UC1, pData); // 单通道灰度
break;
case PixelType_Gvsp_RGB8_Packed:
RGB2BGR(pData, pFrameInfo->nWidth, pFrameInfo->nHeight); // RGB 转 BGR
srcImage = cv::Mat(pFrameInfo->nHeight, pFrameInfo->nWidth, CV_8UC3, pData);
break;
case PixelType_Gvsp_BayerRG8:
cv::Mat bayerImage(pFrameInfo->nHeight, pFrameInfo->nWidth, CV_8UC1, pData);
cv::cvtColor(bayerImage, srcImage, cv::COLOR_BayerRG2BGR);
break;
}
camera->detect(srcImage); // 显示图像
}
void MainWindow::detect(const cv::Mat &image) {
ui->lab_image->setPixmap(QPixmap::fromImage(MatToQImage(image)).scaled(ui->lab_image->size()));
}
4.2 图像格式转换
使用 MatToQImage 函数将 OpenCV 的 cv::Mat 格式图像转换为 Qt 的 QImage 格式,以便在 QLabel 中显示。
QImage MatToQImage(const cv::Mat &mat) {
switch (mat.type()) {
case CV_8UC1:
return QImage(mat.data, mat.cols, mat.rows, static_cast<int>(mat.step), QImage::Format_Grayscale8).copy();
case CV_8UC3: {
cv::Mat rgbMat;
cv::cvtColor(mat, rgbMat, cv::COLOR_BGR2RGB); // BGR 转 RGB
return QImage(rgbMat.data, rgbMat.cols, rgbMat.rows, static_cast<int>(rgbMat.step), QImage::Format_RGB888).copy();
}
case CV_8UC4:
return QImage(mat.data, mat.cols, mat.rows, static_cast<int>(mat.step), QImage::Format_ARGB32).copy();
default:
throw std::runtime_error("Unsupported Mat format");
}
}
5. 异常处理与资源释放
5.1 异常处理
程序注册了异常回调函数 ExceptionCallBack,用于处理如设备断开连接的异常情况,并将错误信息显示在界面上。
void ExceptionCallBack(unsigned int nMsgType, void *pUser) {
if (nMsgType == MV_EXCEPTION_DEV_DISCONNECT) {
MainWindow *camera = static_cast<MainWindow *>(pUser);
camera->setLastErrorMsg(tc("相机连接断开"));
}
}
5.2 资源释放
在退出程序时,需要释放相机资源并关闭设备,以避免内存泄漏。
void MainWindow::on_btn_close_clicked() {
on_btn_Stop_clicked(); // 停止采集
int nRet = MV_CC_CloseDevice(m_handle);
if (MV_OK != nRet) {
setLastErrorMsg(tc("关闭相机失败, 错误码: %1").arg(nRet));
return;
}
}
6. 总结
本代码实现了基于 Qt 和 OpenCV 的相机操作,借助 Qt 的信号槽机制和 OpenCV 的图像处理能力,完成了从相机图像采集到显示的完整流程。
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 基于Qt/C++与OpenCV库 实现基于海康相机的图像采集和显示系统(工程源码可联系博主索要)

发表评论 取消回复