目录
1.引言
在当今AI时代,关于视觉识别似乎已被深度学习所统治,而深度学习是个黑箱,无法看到里面运行的机制,并且它是一个疯狂的吞大数据的野兽,且运行需要极高的CPU或GPU的配置,对于初学者,尤其是手上没有高配置的机器的人,进入视觉识别设置了一道高高的门栏。
机器视觉作为人工智能领域的一个重要分支,正逐渐渗透到工业自动化、智能监控、医疗诊断、自动驾驶等众多领域。机器视觉技术赋予了机器“看”的能力,使得机器能够感知环境、理解图像内容,并做出相应的决策。
对于初学者来说,入门机器视觉可能会感到无从下手,市面上虽然有许多成熟的机器视觉软件,但它们往往价格昂贵,且功能复杂,不够灵活。幸运的是,Python语言以其简洁易懂的特性,结合OpenCV这一强大的计算机视觉库,为初学者提供了一个低成本、高效率的学习平台。
本文将引导读者通过编写一个简易的机器视觉调试工具,来深入理解机器视觉的基本概念和操作流程。我们将从零开始,一步步构建一个基于Python和OpenCV的应用程序,不仅能够帮助初学者快速入门,还能作为进一步探索机器视觉领域的知识储备。
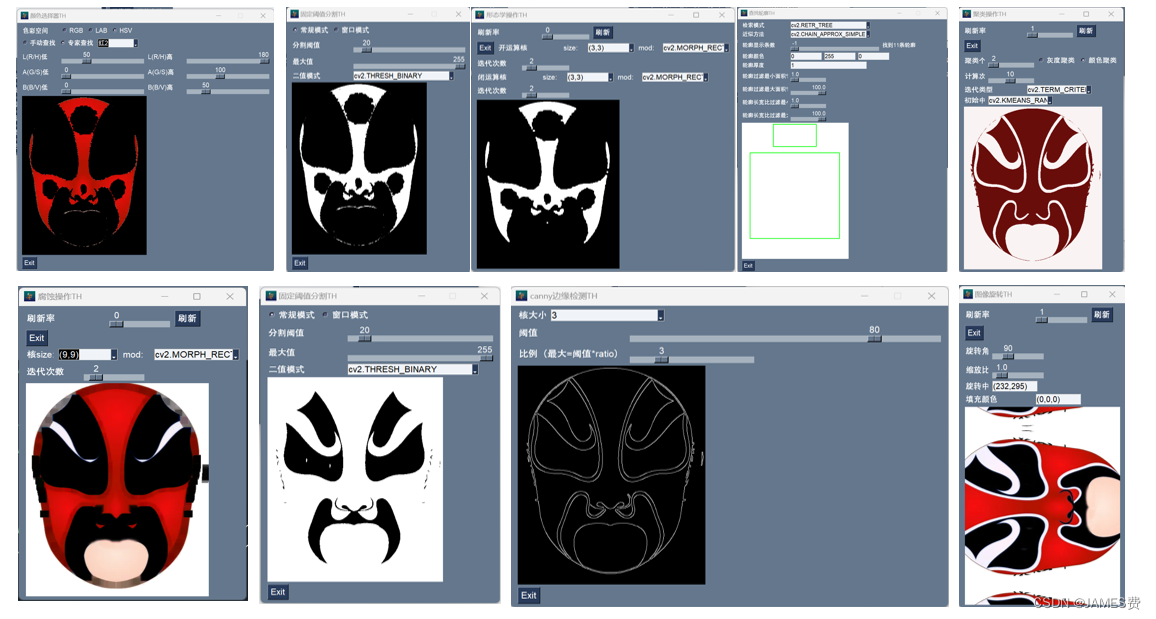
效果如下:
2.框架思路
如上所示,我们可以把opencv这个极开源世界优秀视觉处理的知识库,从抽象的代码,变成一条条流程化的知识流,并且利用将超级参数的调整可视化,即视化实现对机器视觉处理模块或算法的快速直观理解,极端时间内建立对算法的“手感”。便于在实际问题中,快速思考获得解决方案。
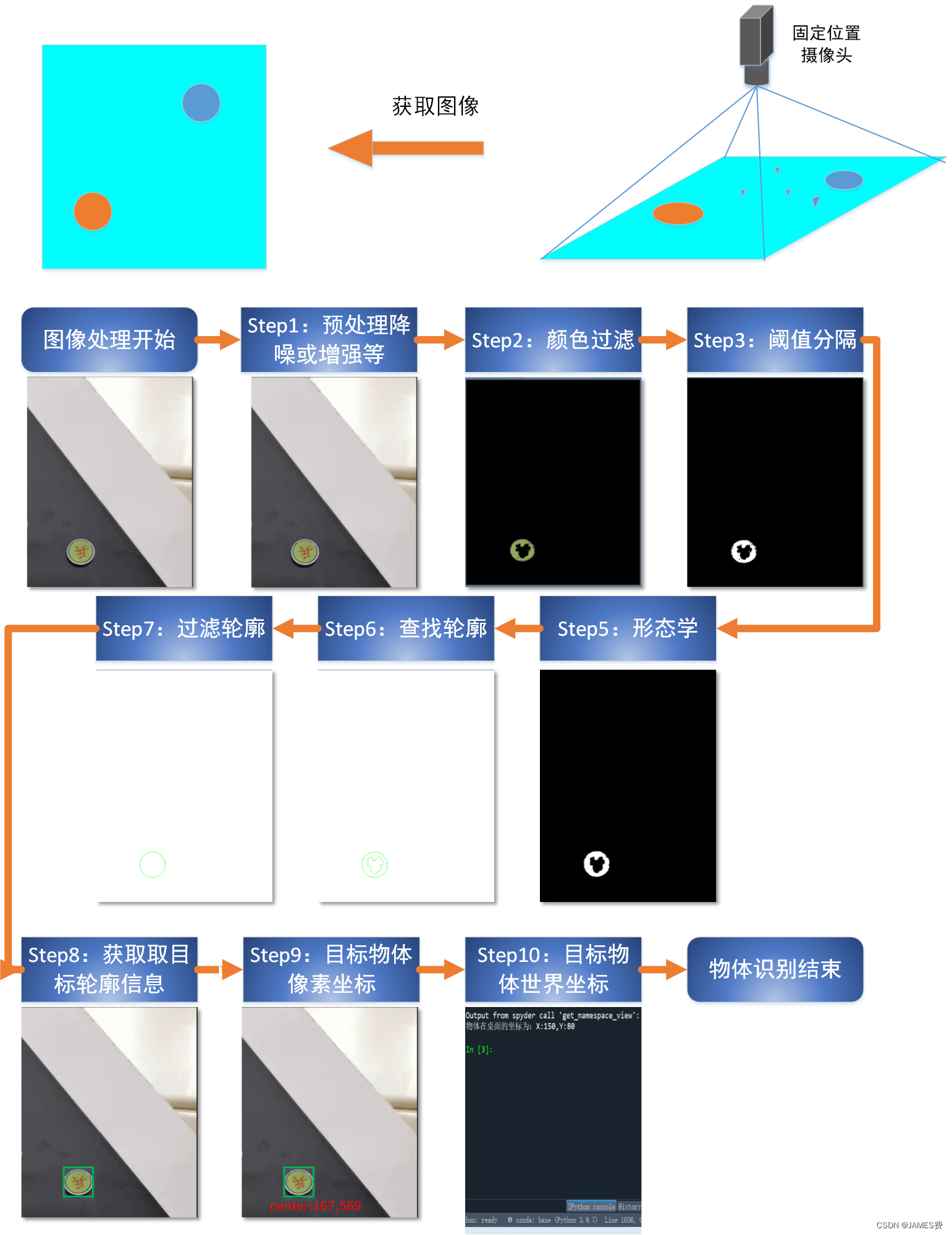
视觉识别的过程就是一个图像信息的流处理过程:
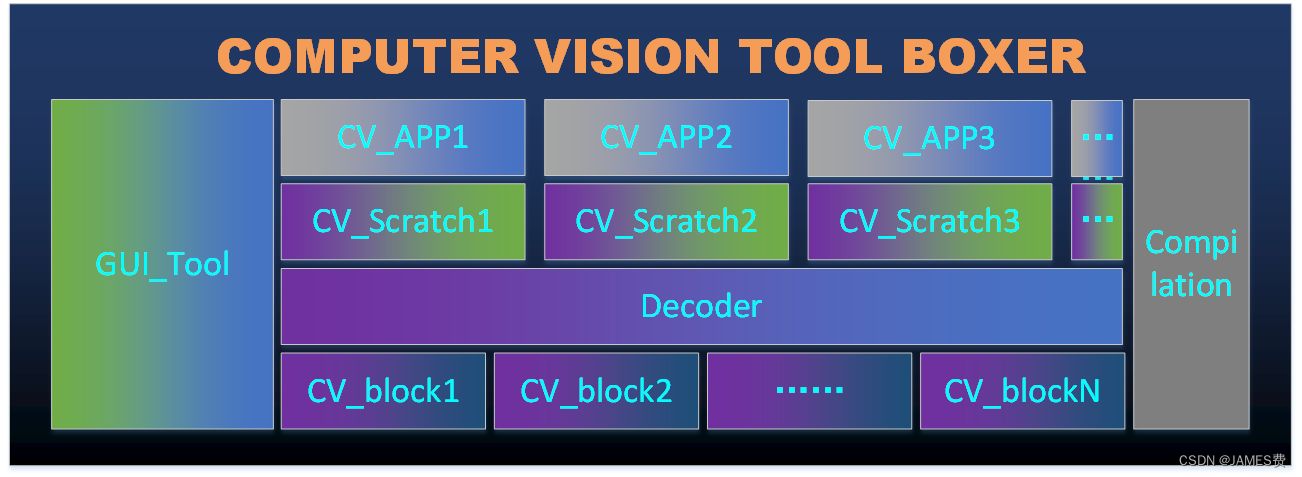
基于以上思考,可以把我们的调试工具设计成一个类似流水线一样的解读执行过程,就是我们先根据场景特点确定上下游的处理模块,把它们做成一个草图,然后我们的主程序负责把它按流程图执行,并且可以随时打开流水线的某个处理盒子,对参数进行方便的调节。总得来说这个工具应该是这样的:
3.环境搭建
python的环境搭建是个头疼的过程,主要障碍是版本的选择,和网速。只要确定好这两者,那么也是一两行指令的事情。裸跑python的基本流程如下(有IDE工具跳过):
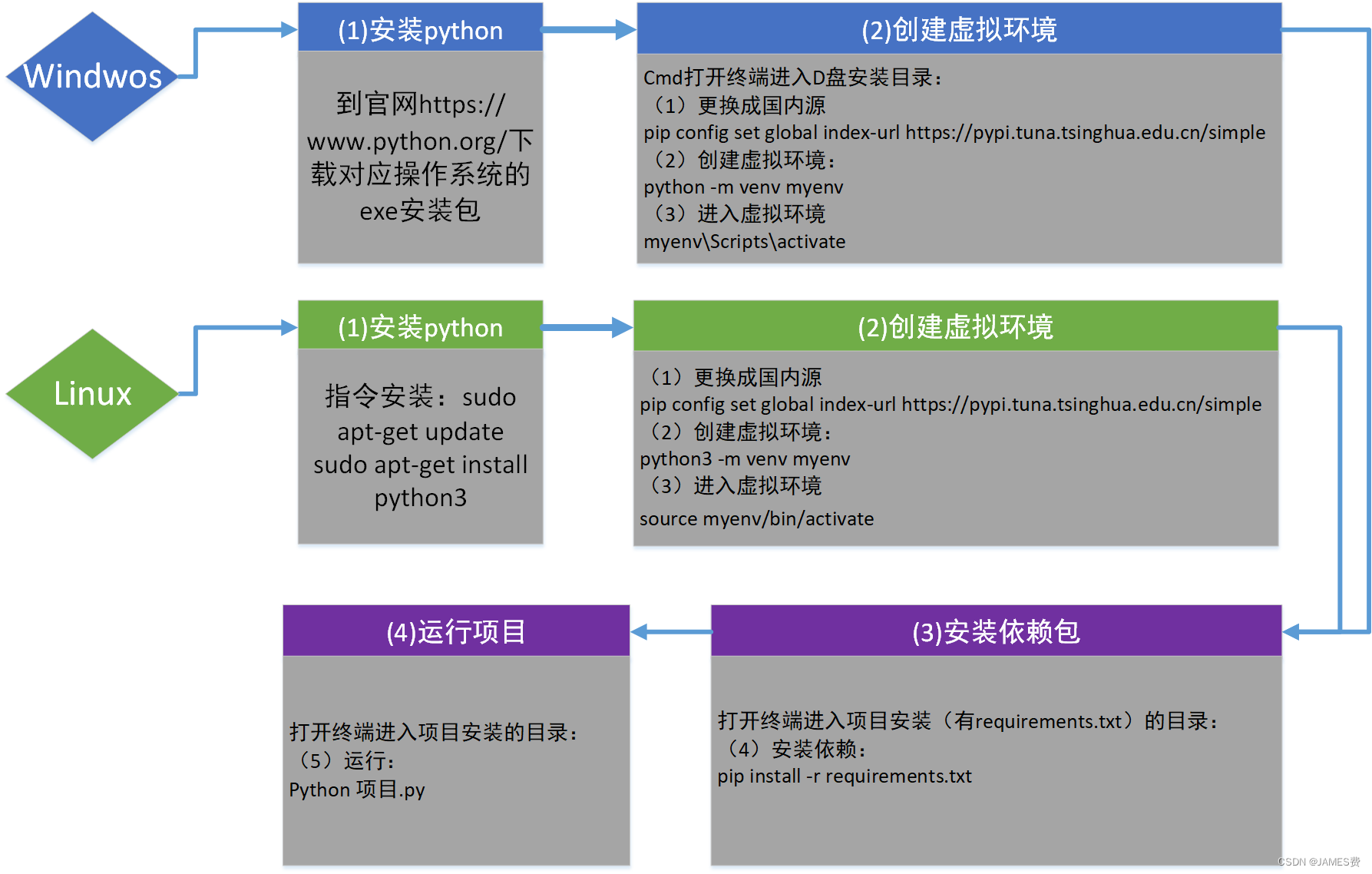
以上流程用到的指令有:
#windows
#更换成国内源
pip config set global index-url https://pypi.tuna.tsinghua.edu.cn/simple
#创建虚拟环境:
python -m venv myenv
#进入虚拟环境
myenv\Scripts\activate
#进入项目路径:
cd projectdir
#安装依赖:
pip install -r requirements.txt
#指令安装
sudo apt-get update
sudo apt-get install python3
#更换成国内源
pip config set global index-url https://pypi.tuna.tsinghua.edu.cn/simple
#创建虚拟环境:
python3 -m venv myenv
#进入虚拟环境
source myenv/bin/activate
#进入项目路径:
cd projectdir
#安装依赖:
pip install -r requirements.txt
本项目用到的库:
matplotlib==3.8.4
networkx==2.6.3
numpy==1.22.4
opencv_python==4.7.0.68
pillow==10.3.0
PySimpleGUI==4.60.5
scikit_learn==1.5.0
4.图像处理流程化的实现
自然而然我们想到了一些优秀的数据结构可以实现我们的思路,比如xml、json。在python中我们就自然而然用到了字典这种格式:
{
"@img_source":["图像源1"],
"@folder":'./image',
"图像源1":{
"funname":"image_source",
"path":["./image/mask.png"],
"output":[],
"result":[],
"father":["root"],
"son":["颜色选择1","腐蚀操作1","固定阈值分割1","canny边缘1","颜色聚类1","图像旋转1"],
},
"图像旋转1":{
"funname":"imgrotaionTH",
"output":[],
"result":[],
"args":[],
"father":["图像源1"],
"son":[],
},
"canny边缘1":{
"funname":"CannyThresholdTH",
"output":[],
"result":[],
"args":[],
"father":["图像源1"],
"son":["形态学1"],
},
"颜色聚类1":{
"funname":"KmeansThresholdTH",
"output":[],
"result":[],
"args":[],
"father":["图像源1"],
"son":[],
},
"形态学1":{
"funname":"morphologyTH",
"output":[],
"result":[],
"args":[],
"father":["canny边缘1"],
"son":["查找轮廓11"],
},
"查找轮廓11":{
"funname":"findContoursTH",
"output":[],
"result":[],
"args":[],
"father":["形态学1"],
"son":[]
},
"颜色选择1":{
"funname":"color_filterTH",
"output":[],
"result":[],
"args":[],
"father":["图像源1"],
"son":["阈值分割111"],
},
"阈值分割111":{
"funname":"thresholdTH",
"output":[],
"result":[],
"args":[],
"father":["颜色选择1"],
"son":["形态学111"],
},
"形态学111":{
"funname":"morphologyTH",
"output":[],
"result":[],
"args":[],
"father":["阈值分割111"],
"son":["查找轮廓111"],
},
"查找轮廓111":{
"funname":"findContoursTH",
"output":[],
"result":[],
"args":[],
"father":["形态学111"],
"son":[]
},
"腐蚀操作1":{
"funname":"erodeTH",
"output":[],
"result":[],
"args":[],
"father":["图像源1"],
"son":[]
},
"固定阈值分割1":{
"funname":"thresholdTH",
"output":[],
"result":[],
"args":[],
"father":["图像源1"],
"son":["形态学11"]
},
"形态学11":{
"funname":"morphologyTH",
"output":[],
"result":[],
"args":[],
"father":["固定阈值分割1"],
"son":["查找轮廓1"],
},
"自适阈值分割1":{
"funname":"adaptiveThresholdTH",
"output":[],
"result":[],
"args":[],
"father":["图像源1"],
"son":[]
},
"查找轮廓1":{
"funname":"findContoursTH",
"output":[],
"result":[],
"args":[],
"father":["形态学11"],
"son":[]
},
}
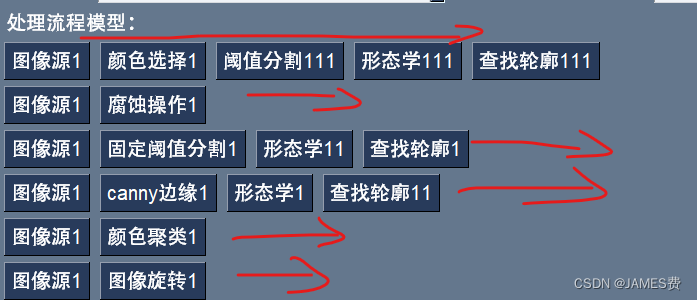
如上通过这种简洁的数据格式,我们一口气把6条图像处理流水线給绘制了出来:
根据这样的思路,我们可以根据需要绘制无数条!!!
5.流水线上的算法块
一条流水线由一个一个处理块组成,处理块对于初学者来说无需自己从0开始编代码,opencv已经几乎集成了所有视觉处理算法块,并且是开源的,直接拿过来用就可以,而这块达到会使用的一个衡量指标是,对算法块参数的理解,难点也在这里。而理解算法块参数的最快方法不是去阅读计算机视觉原理,而是调试,就像想学会游泳最快的方法是跳进水里亲自感觉。后面如果再想深入,那么花时间去啃计算机视觉原理也不迟。
如上所示,一个查找颜色的模块,如果用opencv提供的算法块直接用代码形式去使用,那么要找到一中需要的颜色,在纯代码中,相信你会在确定模式、参数的设置中迷失,直至怀疑人生。但是如果将算法块中的参数暴露,并采用滑块进行随意调节,相信一个5岁的小孩也马上能掌握这个算法的参数调节和模式选择。
需要指出的是,在一个简单的机器视觉任务中,颜色查找这种古老的算法,仍然不失为一种性价比高的解决方案,还要什么AI、和GPU呢?
5.1 算法块的可视化
这里所谓的可视化,就是把算法模块套上一个GUI的皮囊,把参数暴露出来,供人们肆意玩弄。直到摸清它的脾气为止。这里我们用了简单办法,例如一个图像的旋转算法模块:
def imgrotaion(inputimg,center,angle,ratio=1,dsize=None,flags=None,borderMode=cv2.BORDER_REFLECT,borderValue=(0,0,0)):
"""
getRotationMatrix2D中:
center-旋转中心(x,y)
angle-旋转角度
ratio-缩放比例
warpAffine其中:
src - 输入图像。
M - 变换矩阵。
dsize - 输出图像的大小。
flags - 插值方法的组合(int 类型!)
默认为 flags=cv2.INTER_LINEAR,表示线性插值,此外还有:cv2.INTER_NEAREST(最近邻插值) cv2.INTER_AREA (区域插值) cv2.INTER_CUBIC(三次样条插值) cv2.INTER_LANCZOS4(Lanczos插值)
borderMode - 边界像素模式(int 类型!)
borderValue - (重点!)边界填充值; 默认情况下,它为0.
"""
if len(inputimg.shape)==3:
if dsize==None:
h= inputimg.shape[0]
w= inputimg.shape[1]
dsize=(w,h)
if flags==None:
flags=cv2.INTER_LINEAR
M = cv2.getRotationMatrix2D(center, angle, ratio)
dst=cv2.warpAffine(inputimg,M,dsize,flags=flags,borderMode=borderMode,borderValue=borderValue)
return True,dst
else:
print("wrong image shape")
return False,inputimg
def imgrotaionTH(inputimg,mblock):
"""
图像旋转
"""
x=inputimg.shape[1]
y=inputimg.shape[0]
layout= [
[sg.Text('刷新率',size=(15, 1)),sg.Slider((1, 10),1 , 1, orientation='h', size=(10, 15), key='-speed-'),sg.Button('刷新')],
[sg.Button('Exit')],
[sg.Text('旋转角度:',size=(5, 1)),sg.Slider((1, 360),90, 1, orientation='h', size=(10, 15), key='-angle-')
],
[sg.Text('缩放比例:',size=(5, 1)),sg.Slider((0.1, 10),1, 0.1, orientation='h', size=(10, 15), key='-ratio-')],
[sg.Text('旋转中心:(x,y)',size=(5, 1)),
sg.InputText('('+str(int(x/2))+","+str(int(y/2))+")",key='-center-',size=(10, 1))],
[sg.Text('填充颜色',size=(15, 1)),
sg.InputText('(0,0,0)',key='-bordcolor-',size=(10, 1))],
[sg.Image(filename='', key='-IMAGE-')],
]
win = sg.Window('图像旋转TH', layout,resizable=True,disable_close=True)
def flash(win):
win_active=True
event=True
maxtime=1
tita=0
while win_active:
#...略
if event is None or event == 'Exit':
win.close()
win_active = False
break
flash(win)
如上,我们在imgrotaion函数块下面又建立了一个imgrotaionTH的GUI,并且把所有所需的参数显示出来,这样就完成了算法从抽象到形象。
6.总结
本上篇就到这里了,主要阐述了一些进入机器觉的法门,和一个我们认为比较实用的小工具的创建基本思想。
下篇接着唠…
7.调试工具成品链接
已经做了一个开箱即用的Windows的exe程序,供玩弄,本站资源:下载链接
-------------本篇完-------------
————————————————————————————————————————
PS.扩展阅读
————————————————————————————————————————
对于python机器人编程感兴趣的小伙伴,可以进入如下链接阅读相关咨询
ps1.六自由度机器人相关文章资源
(1) 对六自由度机械臂的运动控制及python实现(附源码)
ps2.四轴机器相关文章资源
(1)python机器人实战——0到1创建一个自动是色块机器人项目-CSDN直播
(2)博文《我从0开始搭建了一个色块自动抓取机器人,并实现了大模型的接入和语音控制-(上基础篇)》的vrep基础环境
(3)博文《我从0开始搭建了一个色块自动抓取机器人,并实现了大模型的接入和语音控制-(上基础篇)》的vrep基础环境
(4)实现了语音输入+大模型指令解析+机器视觉+机械臂流程打通
ps3.移动小车相关文章资源
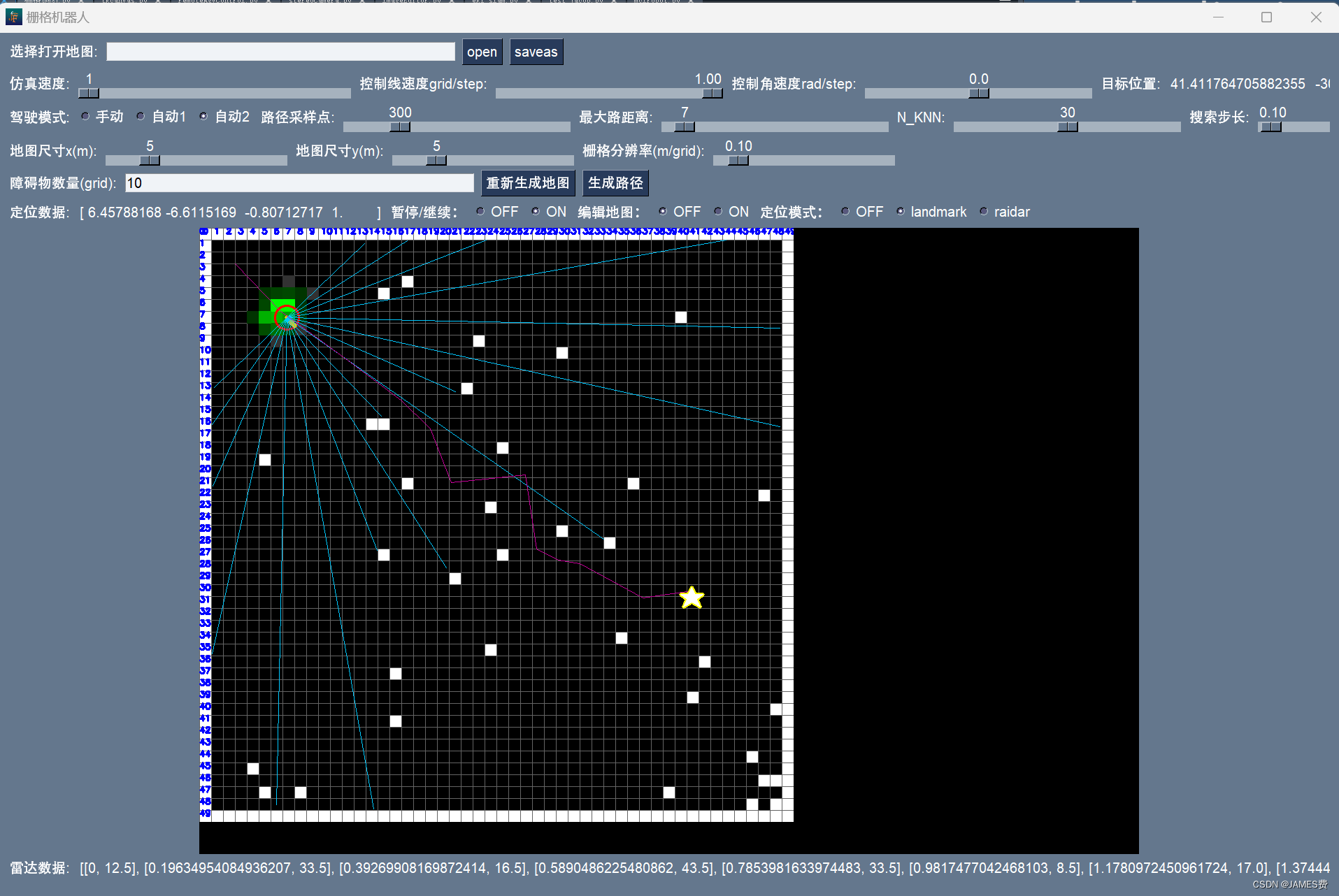
(1)python做了一个极简的栅格地图行走机器人,到底能干啥?[第五弹]——解锁蒙特卡洛定位功能-CSDN博客
(2) 对应python资源:源码地址
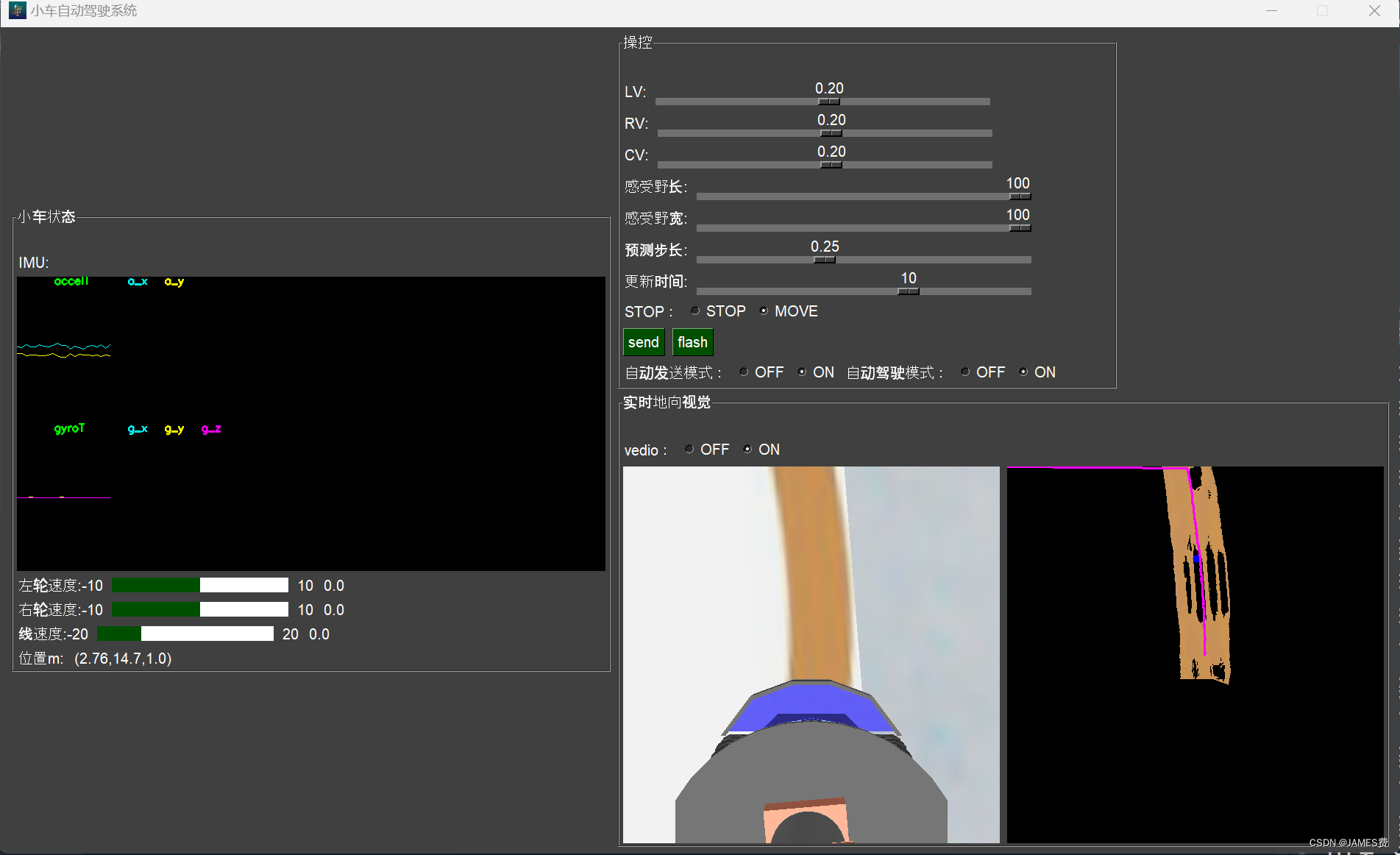
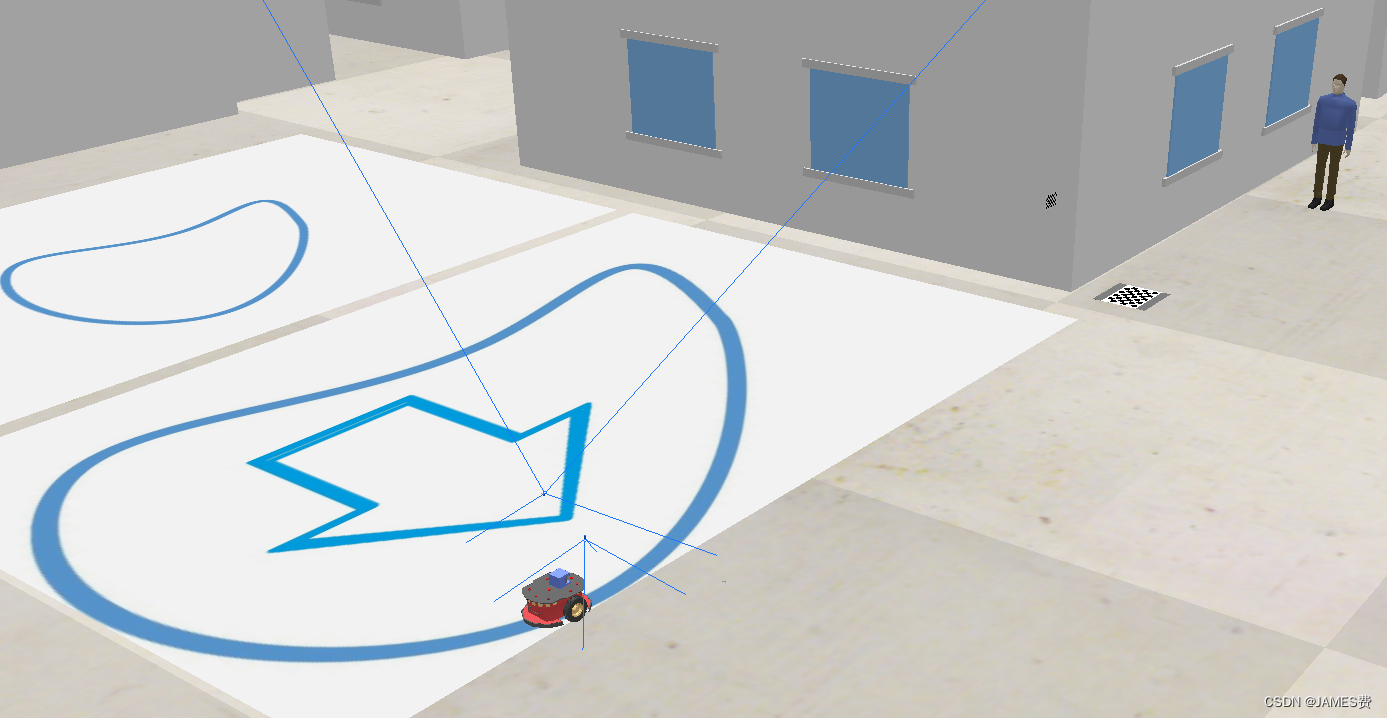
(3)python机器人编程——差速AGV机器、基于视觉和预测控制的循迹、自动行驶(上篇)_agv编程-CSDN博客
(4)python机器人编程——差速AGV机器、基于视觉和预测控制的循迹、自动行驶(下篇)_agv路线规划原则python-CSDN博客
对应python及仿真环境资源:源码链接
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 入门机器视觉的正确打开方式——徒手撸一个python+opencv实现的机器视觉简易调试工具(上)

发表评论 取消回复