目录
6、proBuffer[2]或proBuffer[3]不是数字
在本文作者的文章(参考文章):细说STM32单片机USART中断实现收发控制的方法_stm32 uart 中断接收-CSDN博客 https://wenchm.blog.csdn.net/article/details/143189217 中作者曾经建立了一个Cube IDE工程,利用STM32单片机的USART2串口中断程序,实现单片机接收由串口助手发送来的指令,根据指令更新RTC时间,再通过USART2串口向串口助手发送RTC时间。 参考文章的缺点是,程序简单,没有考虑到干扰指令的影响。程序的鲁棒性很差,除了必须严格按照表格中的协议输入指令外,程序对于不知情、不甚了解协议得错误输入没有鉴别和应急处理的措施。 本文中,作者对不同情况下输入的错误指令,在程序中提供了对应的应急处理方法和错误信息提示。提高了程序的鲁棒性和可用性。 除参考文章中提到的设计目的之外,重点解决程序设计的鲁棒性:对不同的指令输入的应急处理能力、消息提示。 通讯协议(同参考文件)及不同情景下的对错误指令的应急处理方案,对照表如下:一、工程目的
1、 目标
2、通讯协议及应对错误指令的处理目标
| 上位机发送的指令字符串 | 指令功能 | 操作说明 |
| #H13; | 设置小时,将RTC时间的小时修改为13 | |
| #M32; | 设置分钟,将RTC时间的分钟修改为32 | |
| #S05; | 设置秒,将RTC时间的秒修改为5 | |
| #U01; | 恢复上传时间数据 | |
| #U00; | 停止上传时间数据 | |
| &H13; | proBuffer[0]不是# | |
| #H13! | proBuffer[4]不是; | |
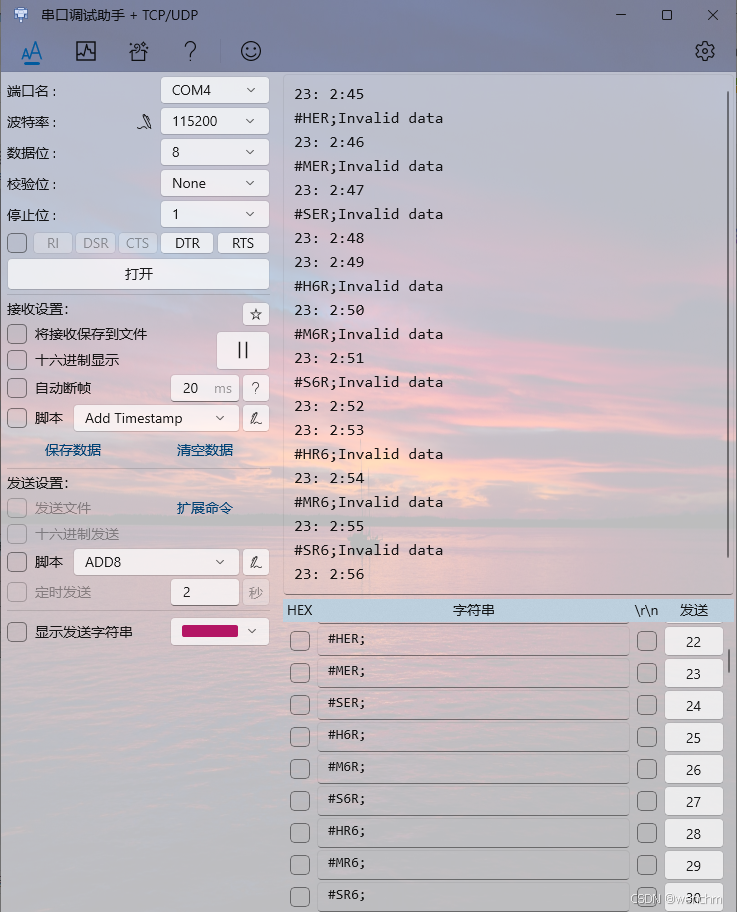
| #HER;#H6R;#HE6; | proBuffer[2]或proBuffer[3]不是数字 | |
| #Y13; | proBuffer[1]不是H、M、S、U | |
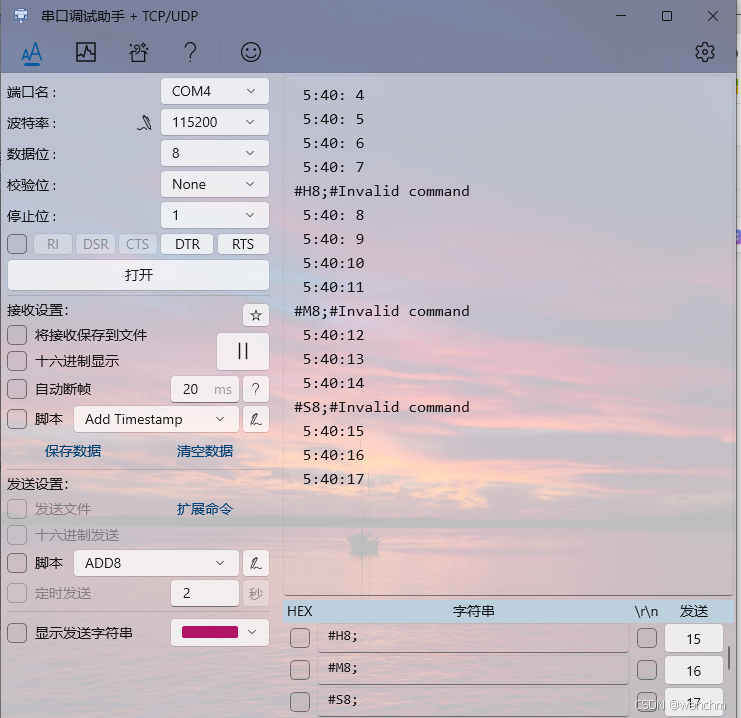
| #H9; | 指令长度小于5 | 第一次输入,串口助手没有相应,因为, 串口接收中断没有接收到足够的5个 字节数据,没有产生中断。第二次输入, 助手显示#H9;#,执行相应的应急处理 程序,清空缓存,重启串口。 |
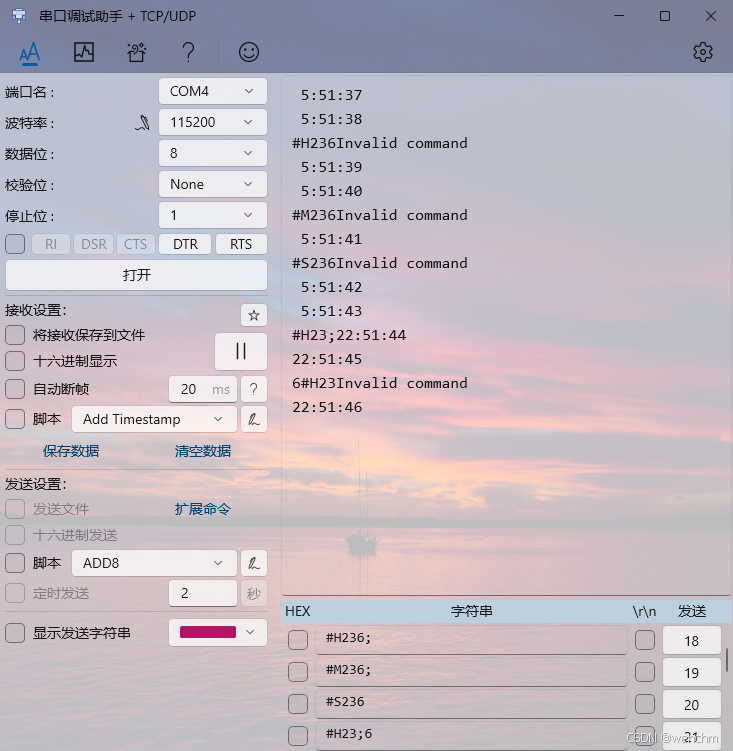
| #H192; | 指令长度大于5 | 第一次输入。串口助手显示#H192,因 为proBuffer[4]不是;执行相应的处理程序 |
| #H19;2 | 指令长度大于5 | 第一次输入。串口助手显示#H19;程 序正常处理,下一中断,助手显示2**** ,因为proBuffer[0]不是#,执行相应 的应急处理程序,清空缓存,重启串口。 |
| #H30; | 小时的数值范围不属于[0,24] | |
| #M70; | 分钟的数值范围不属于[0,60] | |
| #S70; | 秒的数值范围不属于[0,60] |
二、工程设置
与参考文章相同。
三、程序改进
受影响的程序只有usart.c,且只需修改其中的函数void updateRTCTime()。
/*根据串口接受来的指令字符串,更新修改RTC时间*/
void updateRTCTime()
{
unsigned char hello1[]="Invalid command\n";
unsigned char hello2[]="Invalid data\n";
/* -0x30 操作用于将ASCII码表示的字符(假设是数字'0'~'9')转换为其对应的整数 */
uint8_t timeSection = proBuffer[1]; //类型字符
uint8_t tmp10 = proBuffer[2]-0x30; //十位
uint8_t tmp1 = proBuffer[3]-0x30; //个位
uint8_t val= 10*tmp10+tmp1;
// Identify the start_bit is '#',the end_bit is ';'or not,
// Regardless of whether the input characters are less than 5 or more than 5, they will all be processed by this program in the end.
// No matter how you clear the buffer, the data received next time will not be complete.
// This situation will never improve until the serial port is restarted.
if (rxBuffer[0] != '#' || rxBuffer[4] != ';')
{
HAL_UART_Transmit(&huart2,hello1,sizeof(hello1),200);
memset(rxBuffer, '\0', sizeof(rxBuffer));
memset(proBuffer, '\0', sizeof(proBuffer));
HAL_UART_Init(&huart2); //重启串口
rxCompleted = RESET;
HAL_UART_Receive_IT(&huart2, rxBuffer, RX_CMD_LEN);
return;
}
// Identify the data_bit is digits or not
if (isalpha(proBuffer[2]) || isalpha(proBuffer[3]))
{
HAL_UART_Transmit(&huart2,hello2,sizeof(hello2),200);
memset(proBuffer, '\0', sizeof(proBuffer));
return;
}
//update RTCtime
RTC_TimeTypeDef sTime;
RTC_DateTypeDef sDate;
if (HAL_RTC_GetTime(&hrtc, &sTime, RTC_FORMAT_BIN) == HAL_OK)
{
//调用HAL_RTC_GetTime()之后必须调用HAL_RTC_GetDate()以解锁数据,才能连续更新Date and Time
HAL_RTC_GetDate(&hrtc, &sDate, RTC_FORMAT_BIN);
switch (timeSection)
{
case 'H': // 修改小时
{
if(val <= 24)
sTime.Hours = val;
else
{
HAL_UART_Transmit(&huart2,hello2,sizeof(hello2),200);
memset(proBuffer, '\0', sizeof(proBuffer));
return;
}
}
break;
case 'M': // 修改分钟
{
if(val <= 60)
sTime.Minutes = val;
else
{
HAL_UART_Transmit(&huart2,hello2,sizeof(hello2),200);
memset(proBuffer, '\0', sizeof(proBuffer));
return;
}
}
break;
case 'S': // 修改秒
{
if(val <= 60)
sTime.Seconds = val;
else
{
HAL_UART_Transmit(&huart2,hello2,sizeof(hello2),200);
memset(proBuffer, '\0', sizeof(proBuffer));
return;
}
}
break;
case 'U':
{
if( tmp1 == 0)
{
isUploadTime = 0;//pause
return;
}
else
isUploadTime = 1; //resume
}
break;
default: // 不是 'H', 'M' , 'S','U'则返回
{
HAL_UART_Transmit(&huart2,hello1,sizeof(hello1),200);
memset(proBuffer, '\0', sizeof(proBuffer));
}
return;
}
HAL_RTC_SetTime(&hrtc, &sTime, RTC_FORMAT_BIN); //设置RTC时间影响到下一次唤醒
}
}四、下载与调试
本文的重点在于调试。测试各种情况下新设计的程序的鲁棒性:对各种错误的输入的应急处理能力和信息提示。
1、合规的指令

2、 proBuffer[0]不是#
指令不符合格式,显示指令错误。
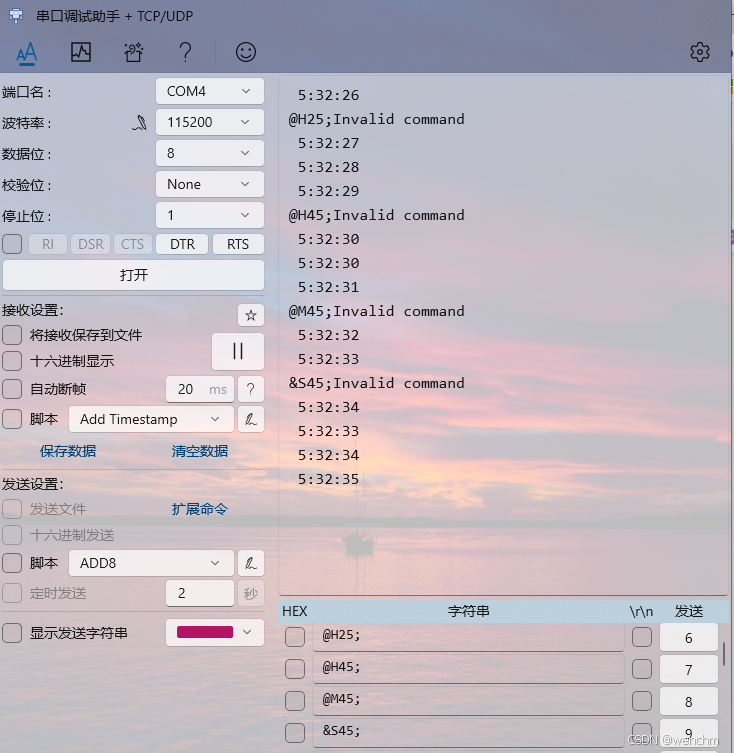
3、proBuffer[4]不是;
指令不符合格式,显示指令错误。

4、指令长度小于5
指令长度小于5时,第一次输入后,看不到响应,再次输入后,显示错误的指令字符(只显示前5个字节),执行应急处理程序,清除缓存,重置串口初始化。
如果不重置串口初始化,无论怎么输入,程序接收到的数据总是陷入混乱的状态。
5、指令长度大于5
指令长度小于5时,显示指令错误。当proBuffer[4]=;时,如果前面的数据符合格式,那么执行数据更新;再次 输入指令后,显示指令错误,并执行相应的应急处理程序,清空缓存,重置串口。
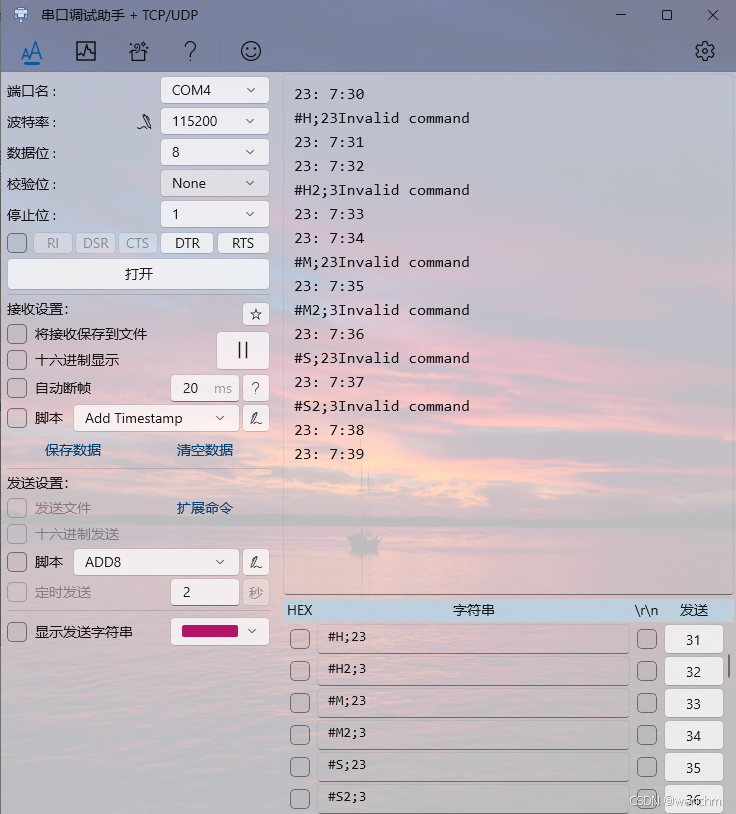
6、proBuffer[2]或proBuffer[3]不是数字
显示数据错误。
7、';'位于proBuffer[2]或proBuffer[3]位置
显示指令错误。
其它没有测试到的错误指令输入的情形,感兴趣的网友亲测吧。
本方法,只限于大写字母,没有提供区分大小写字母的算法,感兴趣的网友可以自己去完善。
本例的程序还存在一个小BUG,就是当修改其他指令时,小时会无规律地被修改。感兴趣的网友自己去纠正吧,哈!
本站资源均来自互联网,仅供研究学习,禁止违法使用和商用,产生法律纠纷本站概不负责!如果侵犯了您的权益请与我们联系!
转载请注明出处: 免费源码网-免费的源码资源网站 » 细说STM32单片机USART中断收发RTC实时时间并改善其鲁棒性的方法

发表评论 取消回复